 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHighly Efficient Observation Process based on FFT Filtering for Robot Swarm Collaborative Navigation in Unknown Environments
Paper and Code
May 13, 2024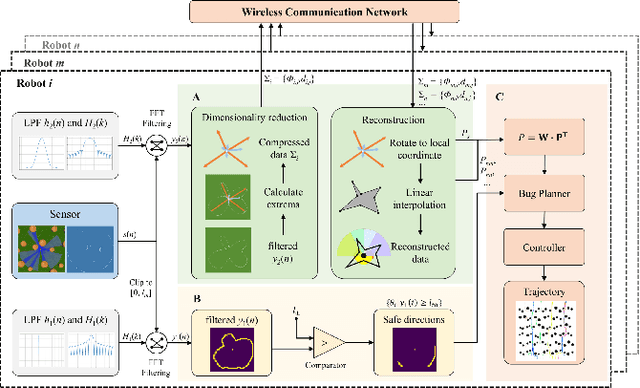
Collaborative path planning for robot swarms in complex, unknown environments without external positioning is a challenging problem. This requires robots to find safe directions based on real-time environmental observations, and to efficiently transfer and fuse these observations within the swarm. This study presents a filtering method based on Fast Fourier Transform (FFT) to address these two issues. We treat sensors' environmental observations as a digital sampling process. Then, we design two different types of filters for safe direction extraction, as well as for the compression and reconstruction of environmental data. The reconstructed data is mapped to probabilistic domain, achieving efficient fusion of swarm observations and planning decision. The computation time is only on the order of microseconds, and the transmission data in communication systems is in bit-level. The performance of our algorithm in sensor data processing was validated in real world experiments, and the effectiveness in swarm path optimization was demonstrated through extensive simulations.