 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware Gaussian Map for Vision-Language Navigation
May 26, 2026Vision-Language Navigation (VLN) requires an agent to navigate 3D environments following natural language instructions. During navigation, existing agents commonly encounter perceptual uncertainty, such as insufficient evidence for reliable grounding or ambiguity in interpreting spatial cues, yet they typically ignore such information when predicting actions. In this work, we explicitly model three forms of perceptual uncertainty (i.e., geometric, semantic, and appearance uncertainty) and integrate them into the agent's observation space to enable informed decision-making. Concretely, our agent first constructs a Semantic Gaussian Map (SGM), composed of differentiable 3D Gaussian primitives initialized from panoramic observations, that encodes both the geometric structure and semantic content of the environment. On top of SGM, geometric uncertainty is estimated through variational perturbations of Gaussian position and scale to assess structural reliability; semantic uncertainty is captured by perturbing Gaussian semantic attributes to reveal ambiguous interpretations; and appearance uncertainty is characterized by Fisher Information, which measures the sensitivity of rendered observations to Gaussian-level variations. These uncertainties are incorporated into SGM, extending it into a unified 3D Value Map, which grounds them as affordances and constraints that support reliable navigation. Comprehensive evaluations across multiple VLN benchmarks show the effectiveness of our agent.
Do World Action Models Generalize Better than VLAs? A Robustness Study
Mar 23, 2026Robot action planning in the real world is challenging as it requires not only understanding the current state of the environment but also predicting how it will evolve in response to actions. Vision-language-action (VLA), which repurpose large-scale vision-language models for robot action generation using action experts, have achieved notable success across a variety of robotic tasks. Nevertheless, their performance remains constrained by the scope of their training data, exhibiting limited generalization to unseen scenarios and vulnerability to diverse contextual perturbations. More recently, world models have been revisited as an alternative to VLAs. These models, referred to as world action models (WAMs), are built upon world models that are trained on large corpora of video data to predict future states. With minor adaptations, their latent representation can be decoded into robot actions. It has been suggested that their explicit dynamic prediction capacity, combined with spatiotemporal priors acquired from web-scale video pretraining, enables WAMs to generalize more effectively than VLAs. In this paper, we conduct a comparative study of prominent state-of-the-art VLA policies and recently released WAMs. We evaluate their performance on the LIBERO-Plus and RoboTwin 2.0-Plus benchmarks under various visual and language perturbations. Our results show that WAMs achieve strong robustness, with LingBot-VA reaching 74.2% success rate on RoboTwin 2.0-Plus and Cosmos-Policy achieving 82.2% on LIBERO-Plus. While VLAs such as $π_{0.5}$ can achieve comparable robustness on certain tasks, they typically require extensive training with diverse robotic datasets and varied learning objectives. Hybrid approaches that partially incorporate video-based dynamic learning exhibit intermediate robustness, highlighting the importance of how video priors are integrated.
H-WM: Robotic Task and Motion Planning Guided by Hierarchical World Model
Feb 11, 2026World models are becoming central to robotic planning and control, as they enable prediction of future state transitions. Existing approaches often emphasize video generation or natural language prediction, which are difficult to directly ground in robot actions and suffer from compounding errors over long horizons. Traditional task and motion planning relies on symbolic logic world models, such as planning domains, that are robot-executable and robust for long-horizon reasoning. However, these methods typically operate independently of visual perception, preventing synchronized symbolic and perceptual state prediction. We propose a Hierarchical World Model (H-WM) that jointly predicts logical and visual state transitions within a unified bilevel framework. H-WM combines a high-level logical world model with a low-level visual world model, integrating the robot-executable, long-horizon robustness of symbolic reasoning with perceptual grounding from visual observations. The hierarchical outputs provide stable and consistent intermediate guidance for long-horizon tasks, mitigating error accumulation and enabling robust execution across extended task sequences. To train H-WM, we introduce a robotic dataset that aligns robot motion with symbolic states, actions, and visual observations. Experiments across vision-language-action (VLA) control policies demonstrate the effectiveness and generality of the approach.
Embodied Arena: A Comprehensive, Unified, and Evolving Evaluation Platform for Embodied AI
Sep 18, 2025Embodied AI development significantly lags behind large foundation models due to three critical challenges: (1) lack of systematic understanding of core capabilities needed for Embodied AI, making research lack clear objectives; (2) absence of unified and standardized evaluation systems, rendering cross-benchmark evaluation infeasible; and (3) underdeveloped automated and scalable acquisition methods for embodied data, creating critical bottlenecks for model scaling. To address these obstacles, we present Embodied Arena, a comprehensive, unified, and evolving evaluation platform for Embodied AI. Our platform establishes a systematic embodied capability taxonomy spanning three levels (perception, reasoning, task execution), seven core capabilities, and 25 fine-grained dimensions, enabling unified evaluation with systematic research objectives. We introduce a standardized evaluation system built upon unified infrastructure supporting flexible integration of 22 diverse benchmarks across three domains (2D/3D Embodied Q&A, Navigation, Task Planning) and 30+ advanced models from 20+ worldwide institutes. Additionally, we develop a novel LLM-driven automated generation pipeline ensuring scalable embodied evaluation data with continuous evolution for diversity and comprehensiveness. Embodied Arena publishes three real-time leaderboards (Embodied Q&A, Navigation, Task Planning) with dual perspectives (benchmark view and capability view), providing comprehensive overviews of advanced model capabilities. Especially, we present nine findings summarized from the evaluation results on the leaderboards of Embodied Arena. This helps to establish clear research veins and pinpoint critical research problems, thereby driving forward progress in the field of Embodied AI.
OmniEVA: Embodied Versatile Planner via Task-Adaptive 3D-Grounded and Embodiment-aware Reasoning
Sep 11, 2025Recent advances in multimodal large language models (MLLMs) have opened new opportunities for embodied intelligence, enabling multimodal understanding, reasoning, and interaction, as well as continuous spatial decision-making. Nevertheless, current MLLM-based embodied systems face two critical limitations. First, Geometric Adaptability Gap: models trained solely on 2D inputs or with hard-coded 3D geometry injection suffer from either insufficient spatial information or restricted 2D generalization, leading to poor adaptability across tasks with diverse spatial demands. Second, Embodiment Constraint Gap: prior work often neglects the physical constraints and capacities of real robots, resulting in task plans that are theoretically valid but practically infeasible.To address these gaps, we introduce OmniEVA -- an embodied versatile planner that enables advanced embodied reasoning and task planning through two pivotal innovations: (1) a Task-Adaptive 3D Grounding mechanism, which introduces a gated router to perform explicit selective regulation of 3D fusion based on contextual requirements, enabling context-aware 3D grounding for diverse embodied tasks. (2) an Embodiment-Aware Reasoning framework that jointly incorporates task goals and embodiment constraints into the reasoning loop, resulting in planning decisions that are both goal-directed and executable. Extensive experimental results demonstrate that OmniEVA not only achieves state-of-the-art general embodied reasoning performance, but also exhibits a strong ability across a wide range of downstream scenarios. Evaluations of a suite of proposed embodied benchmarks, including both primitive and composite tasks, confirm its robust and versatile planning capabilities. Project page: https://omnieva.github.io
Reasoning on a Budget: A Survey of Adaptive and Controllable Test-Time Compute in LLMs
Jul 02, 2025Large language models (LLMs) have rapidly progressed into general-purpose agents capable of solving a broad spectrum of tasks. However, current models remain inefficient at reasoning: they apply fixed inference-time compute regardless of task complexity, often overthinking simple problems while underthinking hard ones. This survey presents a comprehensive review of efficient test-time compute (TTC) strategies, which aim to improve the computational efficiency of LLM reasoning. We introduce a two-tiered taxonomy that distinguishes between L1-controllability, methods that operate under fixed compute budgets, and L2-adaptiveness, methods that dynamically scale inference based on input difficulty or model confidence. We benchmark leading proprietary LLMs across diverse datasets, highlighting critical trade-offs between reasoning performance and token usage. Compared to prior surveys on efficient reasoning, our review emphasizes the practical control, adaptability, and scalability of TTC methods. Finally, we discuss emerging trends such as hybrid thinking models and identify key challenges for future work towards making LLMs more computationally efficient, robust, and responsive to user constraints.
One Demo Is All It Takes: Planning Domain Derivation with LLMs from A Single Demonstration
May 23, 2025Pre-trained Large Language Models (LLMs) have shown promise in solving planning problems but often struggle to ensure plan correctness, especially for long-horizon tasks. Meanwhile, traditional robotic task and motion planning (TAMP) frameworks address these challenges more reliably by combining high-level symbolic search with low-level motion planning. At the core of TAMP is the planning domain, an abstract world representation defined through symbolic predicates and actions. However, creating these domains typically involves substantial manual effort and domain expertise, limiting generalizability. We introduce Planning Domain Derivation with LLMs (PDDLLM), a novel approach that combines simulated physical interaction with LLM reasoning to improve planning performance. The method reduces reliance on humans by inferring planning domains from a single annotated task-execution demonstration. Unlike prior domain-inference methods that rely on partially predefined or language descriptions of planning domains, PDDLLM constructs domains entirely from scratch and automatically integrates them with low-level motion planning skills, enabling fully automated long-horizon planning. PDDLLM is evaluated on over 1,200 diverse tasks spanning nine environments and benchmarked against six LLM-based planning baselines, demonstrating superior long-horizon planning performance, lower token costs, and successful deployment on multiple physical robot platforms.
Mem2Ego: Empowering Vision-Language Models with Global-to-Ego Memory for Long-Horizon Embodied Navigation
Feb 20, 2025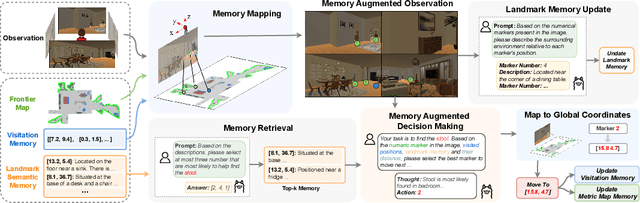

Recent advancements in Large Language Models (LLMs) and Vision-Language Models (VLMs) have made them powerful tools in embodied navigation, enabling agents to leverage commonsense and spatial reasoning for efficient exploration in unfamiliar environments. Existing LLM-based approaches convert global memory, such as semantic or topological maps, into language descriptions to guide navigation. While this improves efficiency and reduces redundant exploration, the loss of geometric information in language-based representations hinders spatial reasoning, especially in intricate environments. To address this, VLM-based approaches directly process ego-centric visual inputs to select optimal directions for exploration. However, relying solely on a first-person perspective makes navigation a partially observed decision-making problem, leading to suboptimal decisions in complex environments. In this paper, we present a novel vision-language model (VLM)-based navigation framework that addresses these challenges by adaptively retrieving task-relevant cues from a global memory module and integrating them with the agent's egocentric observations. By dynamically aligning global contextual information with local perception, our approach enhances spatial reasoning and decision-making in long-horizon tasks. Experimental results demonstrate that the proposed method surpasses previous state-of-the-art approaches in object navigation tasks, providing a more effective and scalable solution for embodied navigation.
SpatialCoT: Advancing Spatial Reasoning through Coordinate Alignment and Chain-of-Thought for Embodied Task Planning
Jan 17, 2025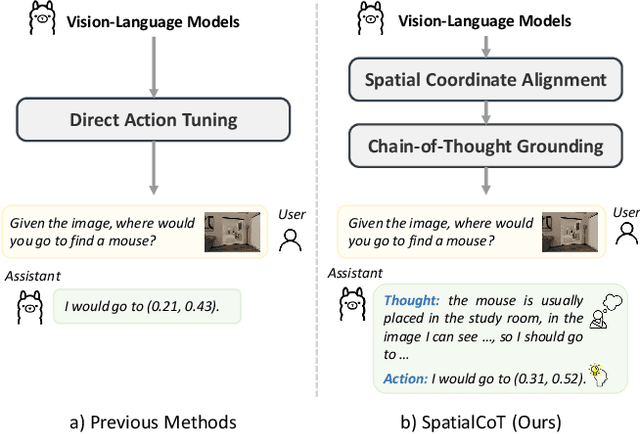
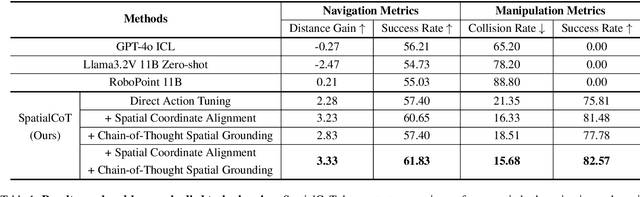
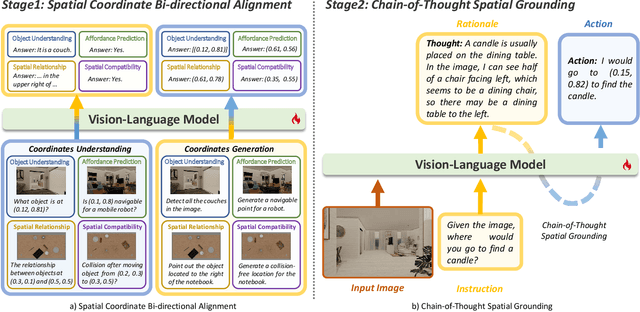
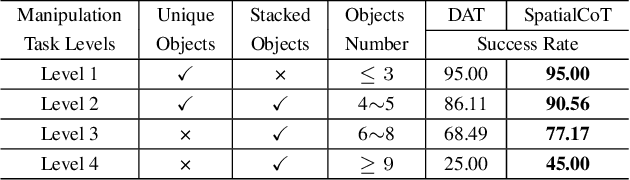
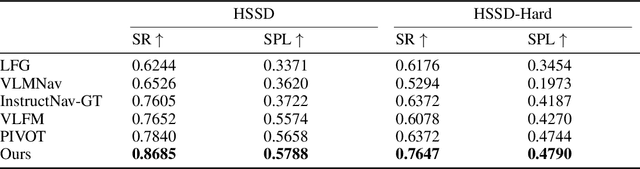
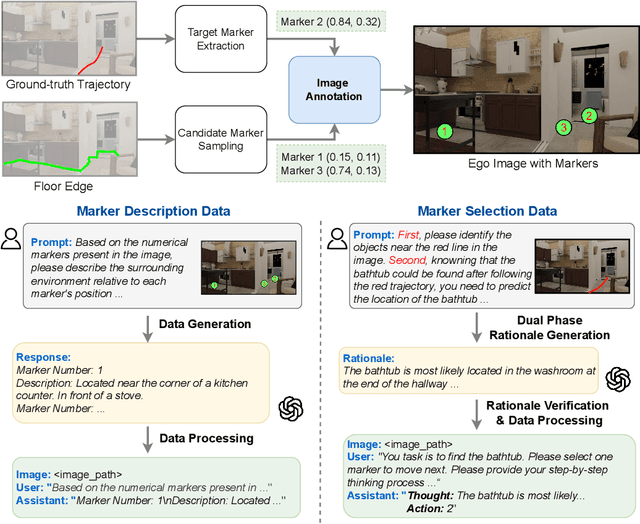
Spatial reasoning is an essential problem in embodied AI research. Efforts to enhance spatial reasoning abilities through supplementary spatial data and fine-tuning have proven limited and ineffective when addressing complex embodied tasks, largely due to their dependence on language-based outputs. While some approaches have introduced a point-based action space to mitigate this issue, they fall short in managing more intricate tasks within complex environments. This deficiency arises from their failure to fully exploit the inherent thinking and reasoning capabilities that are fundamental strengths of Vision-Language Models (VLMs). To address these limitations, we propose a novel approach named SpatialCoT, specifically designed to bolster the spatial reasoning capabilities of VLMs. Our approach comprises two stages: spatial coordinate bi-directional alignment, which aligns vision-language inputs with spatial coordinates, and chain-of-thought spatial grounding, which harnesses the reasoning capabilities of language models for advanced spatial reasoning. We evaluate SpatialCoT on challenging navigation and manipulation tasks, both in simulation and real-world settings. Experimental results demonstrate that our method significantly outperforms previous state-of-the-art approaches in both tasks.
E2ESlack: An End-to-End Graph-Based Framework for Pre-Routing Slack Prediction
Jan 14, 2025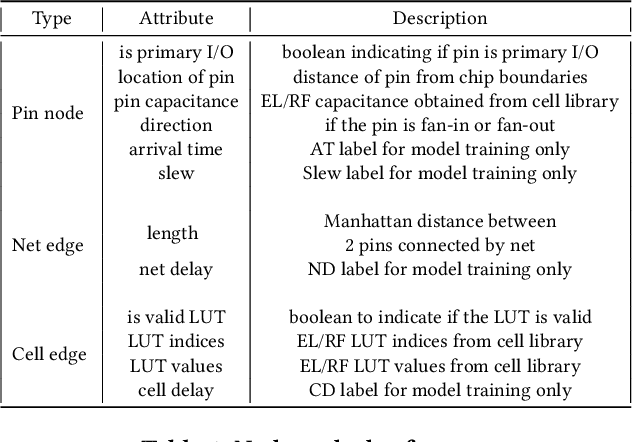
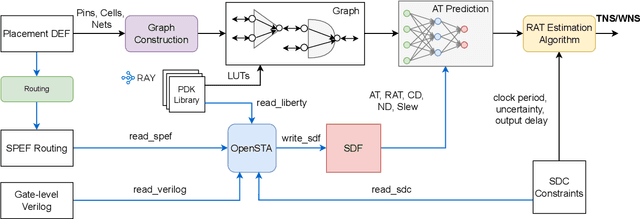
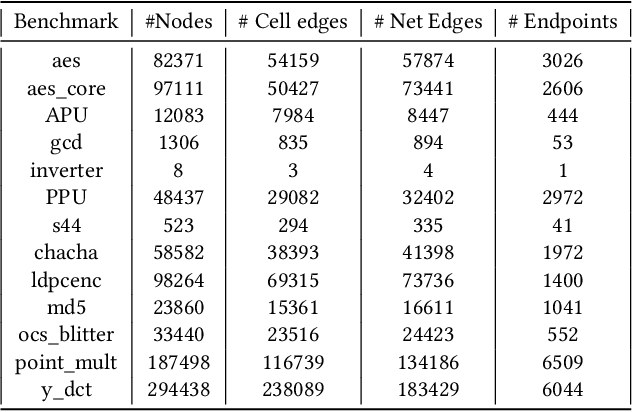
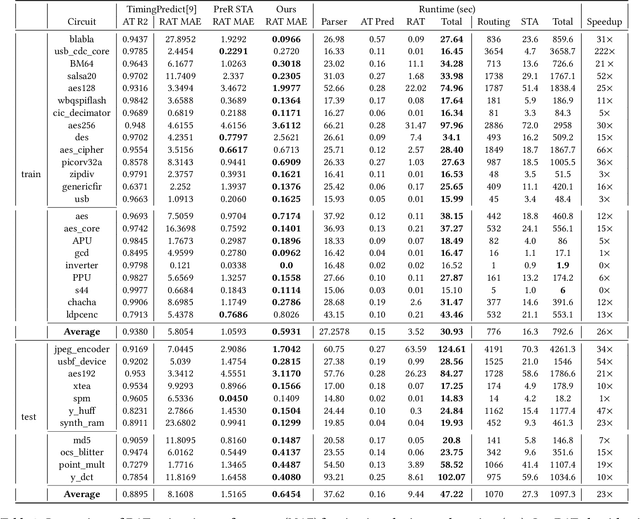
Pre-routing slack prediction remains a critical area of research in Electronic Design Automation (EDA). Despite numerous machine learning-based approaches targeting this task, there is still a lack of a truly end-to-end framework that engineers can use to obtain TNS/WNS metrics from raw circuit data at the placement stage. Existing works have demonstrated effectiveness in Arrival Time (AT) prediction but lack a mechanism for Required Arrival Time (RAT) prediction, which is essential for slack prediction and obtaining TNS/WNS metrics. In this work, we propose E2ESlack, an end-to-end graph-based framework for pre-routing slack prediction. The framework includes a TimingParser that supports DEF, SDF and LIB files for feature extraction and graph construction, an arrival time prediction model and a fast RAT estimation module. To the best of our knowledge, this is the first work capable of predicting path-level slacks at the pre-routing stage. We perform extensive experiments and demonstrate that our proposed RAT estimation method outperforms the SOTA ML-based prediction method and also pre-routing STA tool. Additionally, the proposed E2ESlack framework achieves TNS/WNS values comparable to post-routing STA results while saving up to 23x runtime.