 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping Foundation Models for Universal Segmentation from 3D Whole-Body Positron Emission Tomography
Mar 12, 2026Positron emission tomography (PET) is a key nuclear medicine imaging modality that visualizes radiotracer distributions to quantify in vivo physiological and metabolic processes, playing an irreplaceable role in disease management. Despite its clinical importance, the development of deep learning models for quantitative PET image analysis remains severely limited, driven by both the inherent segmentation challenge from PET's paucity of anatomical contrast and the high costs of data acquisition and annotation. To bridge this gap, we develop generalist foundational models for universal segmentation from 3D whole-body PET imaging. We first build the largest and most comprehensive PET dataset to date, comprising 11041 3D whole-body PET scans with 59831 segmentation masks for model development. Based on this dataset, we present SegAnyPET, an innovative foundational model with general-purpose applicability to diverse segmentation tasks. Built on a 3D architecture with a prompt engineering strategy for mask generation, SegAnyPET enables universal and scalable organ and lesion segmentation, supports efficient human correction with minimal effort, and enables a clinical human-in-the-loop workflow. Extensive evaluations on multi-center, multi-tracer, multi-disease datasets demonstrate that SegAnyPET achieves strong zero-shot performance across a wide range of segmentation tasks, highlighting its potential to advance the clinical applications of molecular imaging.
Mind the Gap: Learning Implicit Impedance in Visuomotor Policies via Intent-Execution Mismatch
Feb 09, 2026Teleoperation inherently relies on the human operator acting as a closed-loop controller to actively compensate for hardware imperfections, including latency, mechanical friction, and lack of explicit force feedback. Standard Behavior Cloning (BC), by mimicking the robot's executed trajectory, fundamentally ignores this compensatory mechanism. In this work, we propose a Dual-State Conditioning framework that shifts the learning objective to "Intent Cloning" (master command). We posit that the Intent-Execution Mismatch, the discrepancy between master command and slave response, is not noise, but a critical signal that physically encodes implicit interaction forces and algorithmically reveals the operator's strategy for overcoming system dynamics. By predicting the master intent, our policy learns to generate a "virtual equilibrium point", effectively realizing implicit impedance control. Furthermore, by explicitly conditioning on the history of this mismatch, the model performs implicit system identification, perceiving tracking errors as external forces to close the control loop. To bridge the temporal gap caused by inference latency, we further formulate the policy as a trajectory inpainter to ensure continuous control. We validate our approach on a sensorless, low-cost bi-manual setup. Empirical results across tasks requiring contact-rich manipulation and dynamic tracking reveal a decisive gap: while standard execution-cloning fails due to the inability to overcome contact stiffness and tracking lag, our mismatch-aware approach achieves robust success. This presents a minimalist behavior cloning framework for low-cost hardware, enabling force perception and dynamic compensation without relying on explicit force sensing. Videos are available on the \href{https://xucj98.github.io/mind-the-gap-page/}{project page}.
MOSS-Speech: Towards True Speech-to-Speech Models Without Text Guidance
Oct 02, 2025



Spoken dialogue systems often rely on cascaded pipelines that transcribe, process, and resynthesize speech. While effective, this design discards paralinguistic cues and limits expressivity. Recent end-to-end methods reduce latency and better preserve these cues, yet still rely on text intermediates, creating a fundamental bottleneck. We present MOSS-Speech, a true speech-to-speech large language model that directly understands and generates speech without relying on text guidance. Our approach combines a modality-based layer-splitting architecture with a frozen pre-training strategy, preserving the reasoning and knowledge of pretrained text LLMs while adding native speech capabilities. Experiments show that our model achieves state-of-the-art results in spoken question answering and delivers comparable speech-to-speech performance relative to existing text-guided systems, while still maintaining competitive text performance. By narrowing the gap between text-guided and direct speech generation, our work establishes a new paradigm for expressive and efficient end-to-end speech interaction.
Localization matters too: How localization error affects UAV flight
Mar 07, 2024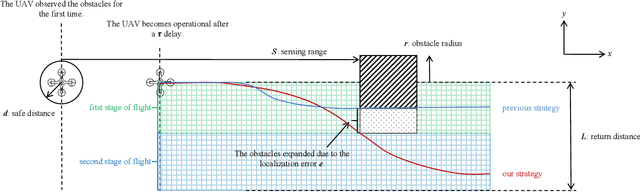
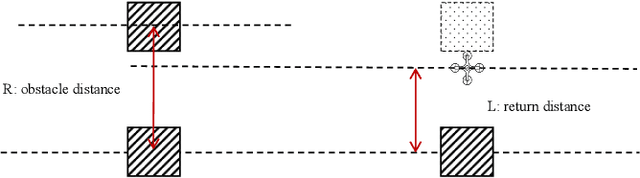
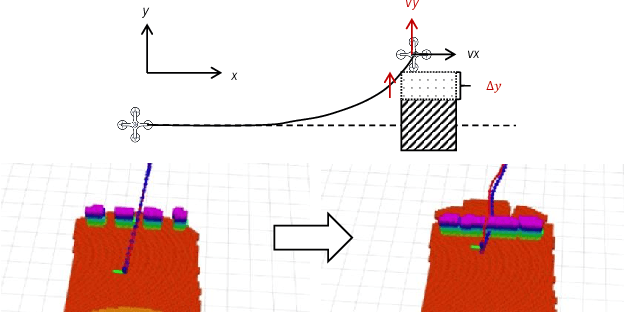
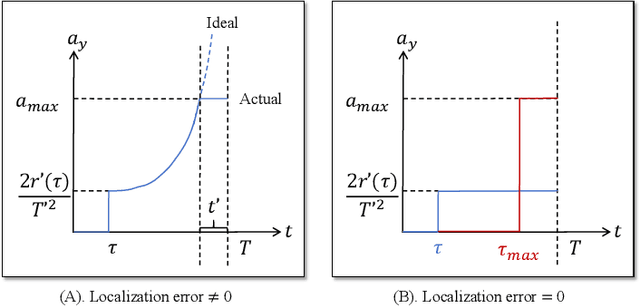
The maximum safe flight speed of a Unmanned Aerial Vehicle (UAV) is an important indicator for measuring its efficiency in completing various tasks. This indicator is influenced by numerous parameters such as UAV localization error, perception range, and system latency. However, in terms of localization errors, although there have been many studies dedicated to improving the localization capability of UAVs, there is a lack of quantitative research on their impact on speed. In this work, we model the relationship between various parameters of the UAV and its maximum flight speed. We consider a scenario similar to navigating through dense forests, where the UAV needs to quickly avoid obstacles directly ahead and swiftly reorient after avoidance. Based on this scenario, we studied how parameters such as localization error affect the maximum safe speed during UAV flight, as well as the coupling relationships between these parameters. Furthermore, we validated our model in a simulation environment, and the results showed that the predicted maximum safe speed had an error of less than 20% compared to the test speed. In high-density situations, localization error has a significant impact on the UAV's maximum safe flight speed. This model can help designers utilize more suitable software and hardware to construct a UAV system.
Explore-Bench: Data Sets, Metrics and Evaluations for Frontier-based and Deep-reinforcement-learning-based Autonomous Exploration
Feb 24, 2022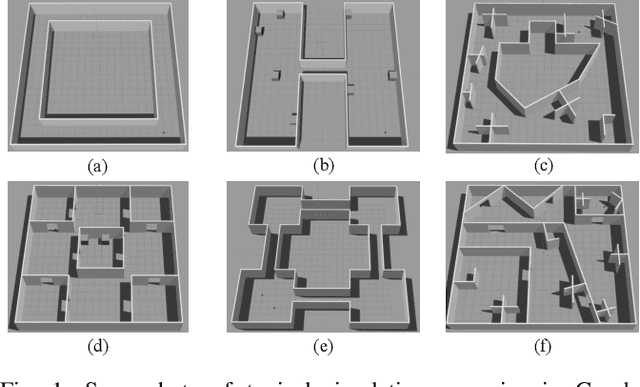
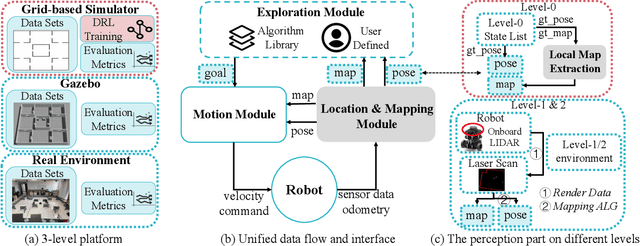
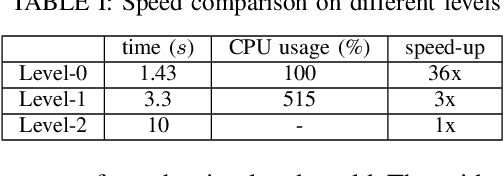
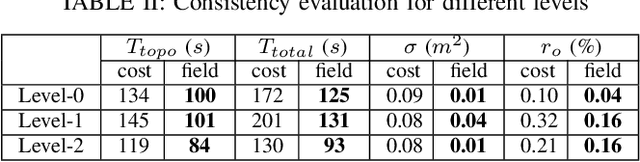
Autonomous exploration and mapping of unknown terrains employing single or multiple robots is an essential task in mobile robotics and has therefore been widely investigated. Nevertheless, given the lack of unified data sets, metrics, and platforms to evaluate the exploration approaches, we develop an autonomous robot exploration benchmark entitled Explore-Bench. The benchmark involves various exploration scenarios and presents two types of quantitative metrics to evaluate exploration efficiency and multi-robot cooperation. Explore-Bench is extremely useful as, recently, deep reinforcement learning (DRL) has been widely used for robot exploration tasks and achieved promising results. However, training DRL-based approaches requires large data sets, and additionally, current benchmarks rely on realistic simulators with a slow simulation speed, which is not appropriate for training exploration strategies. Hence, to support efficient DRL training and comprehensive evaluation, the suggested Explore-Bench designs a 3-level platform with a unified data flow and $12 \times$ speed-up that includes a grid-based simulator for fast evaluation and efficient training, a realistic Gazebo simulator, and a remotely accessible robot testbed for high-accuracy tests in physical environments. The practicality of the proposed benchmark is highlighted with the application of one DRL-based and three frontier-based exploration approaches. Furthermore, we analyze the performance differences and provide some insights about the selection and design of exploration methods. Our benchmark is available at https://github.com/efc-robot/Explore-Bench.
A resource-efficient deep learning framework for low-dose brain PET image reconstruction and analysis
Feb 14, 2022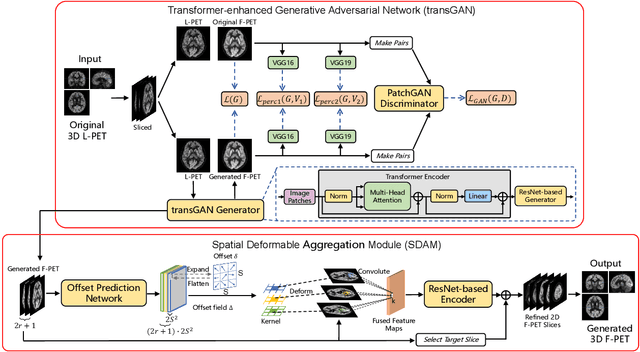

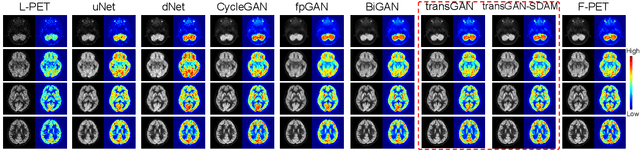

18F-fluorodeoxyglucose (18F-FDG) Positron Emission Tomography (PET) imaging usually needs a full-dose radioactive tracer to obtain satisfactory diagnostic results, which raises concerns about the potential health risks of radiation exposure, especially for pediatric patients. Reconstructing the low-dose PET (L-PET) images to the high-quality full-dose PET (F-PET) ones is an effective way that both reduces the radiation exposure and remains diagnostic accuracy. In this paper, we propose a resource-efficient deep learning framework for L-PET reconstruction and analysis, referred to as transGAN-SDAM, to generate F-PET from corresponding L-PET, and quantify the standard uptake value ratios (SUVRs) of these generated F-PET at whole brain. The transGAN-SDAM consists of two modules: a transformer-encoded Generative Adversarial Network (transGAN) and a Spatial Deformable Aggregation Module (SDAM). The transGAN generates higher quality F-PET images, and then the SDAM integrates the spatial information of a sequence of generated F-PET slices to synthesize whole-brain F-PET images. Experimental results demonstrate the superiority and rationality of our approach.
Variational Automatic Curriculum Learning for Sparse-Reward Cooperative Multi-Agent Problems
Nov 08, 2021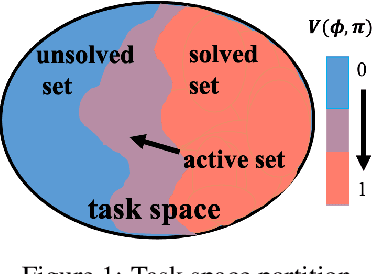
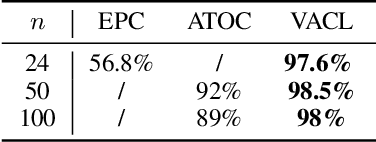
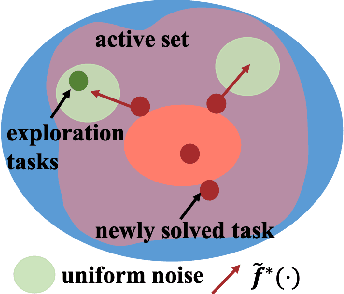

We introduce a curriculum learning algorithm, Variational Automatic Curriculum Learning (VACL), for solving challenging goal-conditioned cooperative multi-agent reinforcement learning problems. We motivate our paradigm through a variational perspective, where the learning objective can be decomposed into two terms: task learning on the current task distribution, and curriculum update to a new task distribution. Local optimization over the second term suggests that the curriculum should gradually expand the training tasks from easy to hard. Our VACL algorithm implements this variational paradigm with two practical components, task expansion and entity progression, which produces training curricula over both the task configurations as well as the number of entities in the task. Experiment results show that VACL solves a collection of sparse-reward problems with a large number of agents. Particularly, using a single desktop machine, VACL achieves 98% coverage rate with 100 agents in the simple-spread benchmark and reproduces the ramp-use behavior originally shown in OpenAI's hide-and-seek project. Our project website is at https://sites.google.com/view/vacl-neurips-2021.
Machine Learning for Electronic Design Automation: A Survey
Jan 10, 2021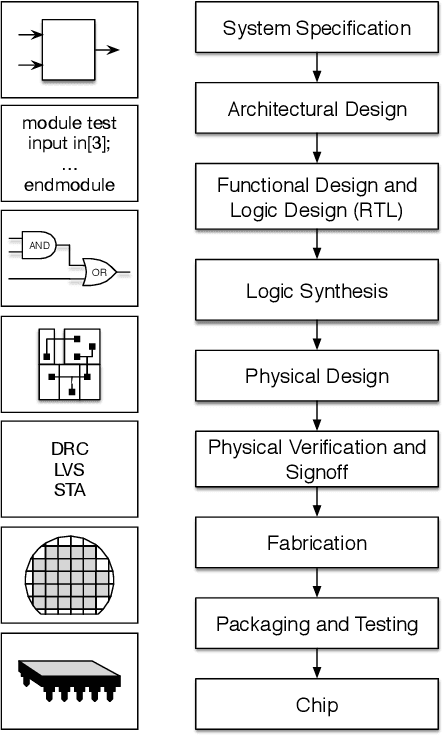
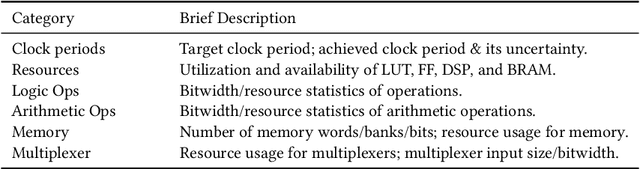
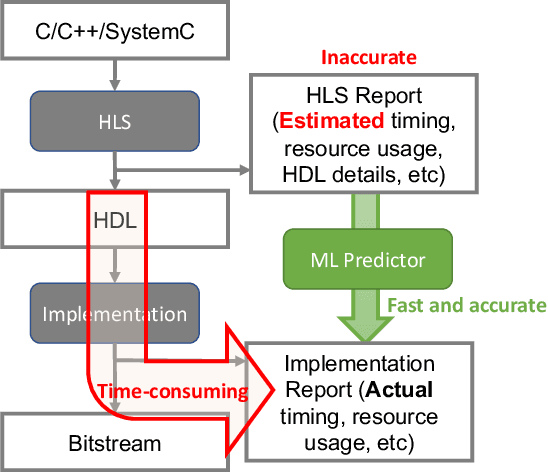
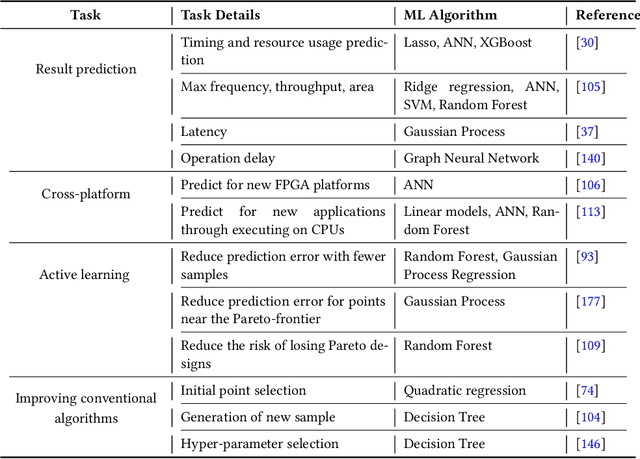
With the down-scaling of CMOS technology, the design complexity of very large-scale integrated (VLSI) is increasing. Although the application of machine learning (ML) techniques in electronic design automation (EDA) can trace its history back to the 90s, the recent breakthrough of ML and the increasing complexity of EDA tasks have aroused more interests in incorporating ML to solve EDA tasks. In this paper, we present a comprehensive review of existing ML for EDA studies, organized following the EDA hierarchy.