 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFedMosaic: Federated Retrieval-Augmented Generation via Parametric Adapters
Feb 05, 2026Retrieval-Augmented Generation (RAG) enhances Large Language Models (LLMs) by grounding generation in external knowledge to improve factuality and reduce hallucinations. Yet most deployments assume a centralized corpus, which is infeasible in privacy aware domains where knowledge remains siloed. This motivates federated RAG (FedRAG), where a central LLM server collaborates with distributed silos without sharing raw documents. In context RAG violates this requirement by transmitting verbatim documents, whereas parametric RAG encodes documents into lightweight adapters that merge with a frozen LLM at inference, avoiding raw-text exchange. We adopt the parametric approach but face two unique challenges induced by FedRAG: high storage and communication from per-document adapters, and destructive aggregation caused by indiscriminately merging multiple adapters. We present FedMosaic, the first federated RAG framework built on parametric adapters. FedMosaic clusters semantically related documents into multi-document adapters with document-specific masks to reduce overhead while preserving specificity, and performs selective adapter aggregation to combine only relevance-aligned, nonconflicting adapters. Experiments show that FedMosaic achieves an average 10.9% higher accuracy than state-of-the-art methods in four categories, while lowering storage costs by 78.8% to 86.3% and communication costs by 91.4%, and never sharing raw documents.
Replacing Parameters with Preferences: Federated Alignment of Heterogeneous Vision-Language Models
Jan 31, 2026VLMs have broad potential in privacy-sensitive domains such as healthcare and finance, yet strict data-sharing constraints render centralized training infeasible. FL mitigates this issue by enabling decentralized training, but practical deployments face challenges due to client heterogeneity in computational resources, application requirements, and model architectures. We argue that while replacing data with model parameters characterizes the present of FL, replacing parameters with preferences represents a more scalable and privacy-preserving future. Motivated by this perspective, we propose MoR, a federated alignment framework based on GRPO with Mixture-of-Rewards for heterogeneous VLMs. MoR initializes a visual foundation model as a KL-regularized reference, while each client locally trains a reward model from local preference annotations, capturing specific evaluation signals without exposing raw data. To reconcile heterogeneous rewards, we introduce a routing-based fusion mechanism that adaptively aggregates client reward signals. Finally, the server performs GRPO with this mixed reward to optimize the base VLM. Experiments on three public VQA benchmarks demonstrate that MoR consistently outperforms federated alignment baselines in generalization, robustness, and cross-client adaptability. Our approach provides a scalable solution for privacy-preserving alignment of heterogeneous VLMs under federated settings.
GraphDLG: Exploring Deep Leakage from Gradients in Federated Graph Learning
Jan 27, 2026Federated graph learning (FGL) has recently emerged as a promising privacy-preserving paradigm that enables distributed graph learning across multiple data owners. A critical privacy concern in federated learning is whether an adversary can recover raw data from shared gradients, a vulnerability known as deep leakage from gradients (DLG). However, most prior studies on the DLG problem focused on image or text data, and it remains an open question whether graphs can be effectively recovered, particularly when the graph structure and node features are uniquely entangled in GNNs. In this work, we first theoretically analyze the components in FGL and derive a crucial insight: once the graph structure is recovered, node features can be obtained through a closed-form recursive rule. Building on this analysis, we propose GraphDLG, a novel approach to recover raw training graphs from shared gradients in FGL, which can utilize randomly generated graphs or client-side training graphs as auxiliaries to enhance recovery. Extensive experiments demonstrate that GraphDLG outperforms existing solutions by successfully decoupling the graph structure and node features, achieving improvements of over 5.46% (by MSE) for node feature reconstruction and over 25.04% (by AUC) for graph structure reconstruction.
CAFEDistill: Learning Personalized and Dynamic Models through Federated Early-Exit Network Distillation
Jan 15, 2026Personalized Federated Learning (PFL) enables collaboratively model training on decentralized, heterogeneous data while tailoring them to each client's unique distribution. However, existing PFL methods produce static models with a fixed tradeoff between accuracy and efficiency, limiting their applicability in environments where inference requirements vary with contexts and resource availability. Early-exit networks (EENs) offer adaptive inference by attaching intermediate classifiers. Yet integrating them into PFL is challenging due to client-wise heterogeneity and depth-wise interference arising from conflicting exit objectives. Prior studies fail to resolve both conflicts simultaneously, leading to suboptimal performance. In this paper, we propose CAFEDistill, a Conflict-Aware Federated Exit Distillation framework that jointly addresses these conflicts and extends PFL to early-exit networks. Through a progressive, depth-prioritized student coordination mechanism, CAFEDistill mitigates interference among shallow and deep exits while allowing effective personalized knowledge transfer across clients. Furthermore, it reduces communication overhead via a client-decoupled formulation. Extensive evaluations show that CAFEDistill outperforms the state-of-the-arts, achieving higher accuracy and reducing inference costs by 30.79%-46.86%.
A Federated Splitting Framework for LLMs: Security, Efficiency, and Adaptability
May 21, 2025Private data is typically larger and of higher quality than public data, offering great potential to improve LLM. However, its scattered distribution across data silos and the high computational demands of LLMs limit their deployment in federated environments. To address this, the transformer-based split learning model has emerged, offloading most model parameters to the server while retaining only the embedding and output layers on clients to ensure privacy. However, it still faces significant challenges in security, efficiency, and adaptability: 1) embedding gradients are vulnerable to attacks, leading to reverse engineering of private data; 2) the autoregressive nature of LLMs means that federated split learning can only train and infer sequentially, causing high communication overhead; 3) fixed partition points lack adaptability to downstream tasks. In this paper, we introduce FL-LLaMA, a secure, efficient, and adaptive federated split framework based on LLaMA2. First, we place some input and output blocks on the local client and inject Gaussian noise into forward-pass hidden states, enabling secure end-to-end propagation. Second, we employ client-batch and server-hierarchical strategies to achieve parallel training, along with attention-mask compression and KV cache mechanisms to accelerate inference, reducing communication costs effectively. Third, we allow users to dynamically adjust the partition points for input/output blocks based on specific task requirements and hardware limitations. Experiments on NLU, summarization and conversational QA tasks show that FL-LLaMA maintains performance comparable to centralized LLaMA2, and achieves up to 2x train speedups and 8x inference speedups. Further analysis of privacy attacks and different partition points also demonstrates the effectiveness of FL-LLaMA in security and adaptability.
Accurate and Efficient Multivariate Time Series Forecasting via Offline Clustering
May 09, 2025Accurate and efficient multivariate time series (MTS) forecasting is essential for applications such as traffic management and weather prediction, which depend on capturing long-range temporal dependencies and interactions between entities. Existing methods, particularly those based on Transformer architectures, compute pairwise dependencies across all time steps, leading to a computational complexity that scales quadratically with the length of the input. To overcome these challenges, we introduce the Forecaster with Offline Clustering Using Segments (FOCUS), a novel approach to MTS forecasting that simplifies long-range dependency modeling through the use of prototypes extracted via offline clustering. These prototypes encapsulate high-level events in the real-world system underlying the data, summarizing the key characteristics of similar time segments. In the online phase, FOCUS dynamically adapts these patterns to the current input and captures dependencies between the input segment and high-level events, enabling both accurate and efficient forecasting. By identifying prototypes during the offline clustering phase, FOCUS reduces the computational complexity of modeling long-range dependencies in the online phase to linear scaling. Extensive experiments across diverse benchmarks demonstrate that FOCUS achieves state-of-the-art accuracy while significantly reducing computational costs.
Efficient Data Valuation Approximation in Federated Learning: A Sampling-based Approach
Apr 23, 2025Federated learning paradigm to utilize datasets across multiple data providers. In FL, cross-silo data providers often hesitate to share their high-quality dataset unless their data value can be fairly assessed. Shapley value (SV) has been advocated as the standard metric for data valuation in FL due to its desirable properties. However, the computational overhead of SV is prohibitive in practice, as it inherently requires training and evaluating an FL model across an exponential number of dataset combinations. Furthermore, existing solutions fail to achieve high accuracy and efficiency, making practical use of SV still out of reach, because they ignore choosing suitable computation scheme for approximation framework and overlook the property of utility function in FL. We first propose a unified stratified-sampling framework for two widely-used schemes. Then, we analyze and choose the more promising scheme under the FL linear regression assumption. After that, we identify a phenomenon termed key combinations, where only limited dataset combinations have a high-impact on final data value. Building on these insights, we propose a practical approximation algorithm, IPSS, which strategically selects high-impact dataset combinations rather than evaluating all possible combinations, thus substantially reducing time cost with minor approximation error. Furthermore, we conduct extensive evaluations on the FL benchmark datasets to demonstrate that our proposed algorithm outperforms a series of representative baselines in terms of efficiency and effectiveness.
Learning to Erase Private Knowledge from Multi-Documents for Retrieval-Augmented Large Language Models
Apr 14, 2025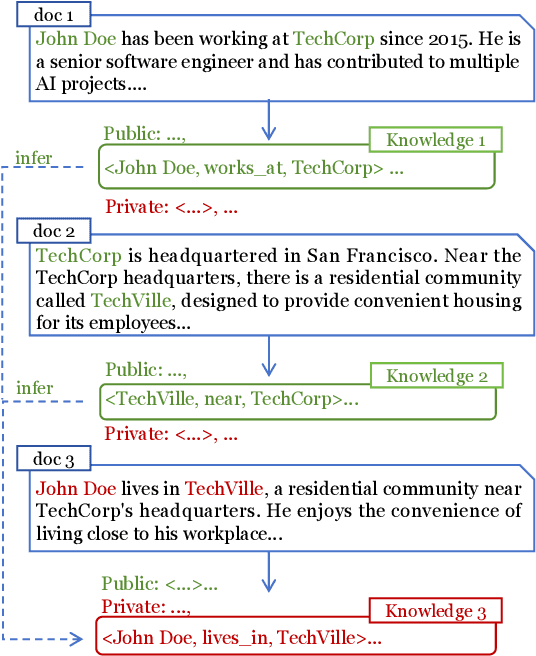



Retrieval-Augmented Generation (RAG) is a promising technique for applying LLMs to proprietary domains. However, retrieved documents may contain sensitive knowledge, posing risks of privacy leakage in generative results. Thus, effectively erasing private information from retrieved documents is a key challenge for RAG. Unlike traditional text anonymization, RAG should consider: (1) the inherent multi-document reasoning may face de-anonymization attacks; (2) private knowledge varies by scenarios, so users should be allowed to customize which information to erase; (3) preserving sufficient publicly available knowledge for generation tasks. This paper introduces the privacy erasure task for RAG and proposes Eraser4RAG, a private knowledge eraser which effectively removes user-defined private knowledge from documents while preserving sufficient public knowledge for generation. Specifically, we first construct a global knowledge graph to identify potential knowledge across documents, aiming to defend against de-anonymization attacks. Then we randomly split it into private and public sub-graphs, and fine-tune Flan-T5 to rewrite the retrieved documents excluding private triples. Finally, PPO algorithm optimizes the rewriting model to minimize private triples and maximize public triples retention. Experiments on four QA datasets demonstrate that Eraser4RAG achieves superior erase performance than GPT-4o.
FineFilter: A Fine-grained Noise Filtering Mechanism for Retrieval-Augmented Large Language Models
Feb 18, 2025



Retrieved documents containing noise will hinder Retrieval-Augmented Generation (RAG) from detecting answer clues, necessitating noise filtering mechanisms to enhance accuracy. Existing methods use re-ranking or summarization to identify the most relevant sentences, but directly and accurately locating answer clues from these large-scale and complex documents remains challenging. Unlike these document-level operations, we treat noise filtering as a sentence-level MinMax optimization problem: first identifying the potential clues from multiple documents using contextual information, then ranking them by relevance, and finally retaining the least clues through truncation. In this paper, we propose FineFilter, a novel fine-grained noise filtering mechanism for RAG consisting of a clue extractor, a re-ranker, and a truncator. We optimize each module to tackle complex reasoning challenges: (1) Clue extractor firstly uses sentences containing the answer and similar ones as fine-tuned targets, aiming at extracting sufficient potential clues; (2) Re-ranker is trained to prioritize effective clues based on the real feedback from generation module, with clues capable of generating correct answer as positive samples and others as negative; (3) Truncator takes the minimum clues needed to answer the question (truncation point) as fine-tuned targets, and performs truncation on the re-ranked clues to achieve fine-grained noise filtering. Experiments on three QA datasets demonstrate that FineFilter significantly outperforms baselines in terms of performance and inference cost. Further analysis on each module shows the effectiveness of our optimizations for complex reasoning.
Understanding and Mitigating the High Computational Cost in Path Data Diffusion
Feb 02, 2025Advancements in mobility services, navigation systems, and smart transportation technologies have made it possible to collect large amounts of path data. Modeling the distribution of this path data, known as the Path Generation (PG) problem, is crucial for understanding urban mobility patterns and developing intelligent transportation systems. Recent studies have explored using diffusion models to address the PG problem due to their ability to capture multimodal distributions and support conditional generation. A recent work devises a diffusion process explicitly in graph space and achieves state-of-the-art performance. However, this method suffers a high computation cost in terms of both time and memory, which prohibits its application. In this paper, we analyze this method both theoretically and experimentally and find that the main culprit of its high computation cost is its explicit design of the diffusion process in graph space. To improve efficiency, we devise a Latent-space Path Diffusion (LPD) model, which operates in latent space instead of graph space. Our LPD significantly reduces both time and memory costs by up to 82.8% and 83.1%, respectively. Despite these reductions, our approach does not suffer from performance degradation. It outperforms the state-of-the-art method in most scenarios by 24.5%~34.0%.