 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSciFig: Towards Automating Scientific Figure Generation
Jan 07, 2026Creating high-quality figures and visualizations for scientific papers is a time-consuming task that requires both deep domain knowledge and professional design skills. Despite over 2.5 million scientific papers published annually, the figure generation process remains largely manual. We introduce $\textbf{SciFig}$, an end-to-end AI agent system that generates publication-ready pipeline figures directly from research paper texts. SciFig uses a hierarchical layout generation strategy, which parses research descriptions to identify component relationships, groups related elements into functional modules, and generates inter-module connections to establish visual organization. Furthermore, an iterative chain-of-thought (CoT) feedback mechanism progressively improves layouts through multiple rounds of visual analysis and reasoning. We introduce a rubric-based evaluation framework that analyzes 2,219 real scientific figures to extract evaluation rubrics and automatically generates comprehensive evaluation criteria. SciFig demonstrates remarkable performance: achieving 70.1$\%$ overall quality on dataset-level evaluation and 66.2$\%$ on paper-specific evaluation, and consistently high scores across metrics such as visual clarity, structural organization, and scientific accuracy. SciFig figure generation pipeline and our evaluation benchmark will be open-sourced.
Can World Simulators Reason? Gen-ViRe: A Generative Visual Reasoning Benchmark
Nov 17, 2025
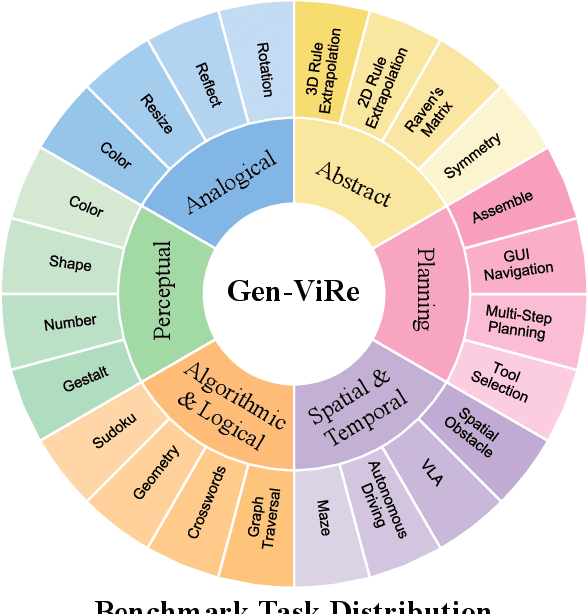
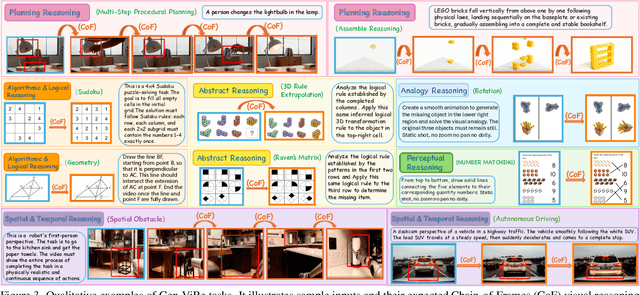
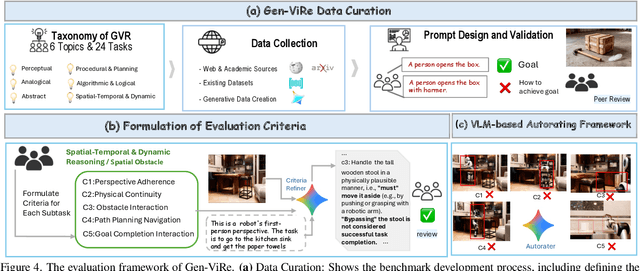
While Chain-of-Thought (CoT) prompting enables sophisticated symbolic reasoning in LLMs, it remains confined to discrete text and cannot simulate the continuous, physics-governed dynamics of the real world. Recent video generation models have emerged as potential world simulators through Chain-of-Frames (CoF) reasoning -- materializing thought as frame-by-frame visual sequences, with each frame representing a physically-grounded reasoning step. Despite compelling demonstrations, a challenge persists: existing benchmarks, focusing on fidelity or alignment, do not assess CoF reasoning and thus cannot measure core cognitive abilities in multi-step planning, algorithmic logic, or abstract pattern extrapolation. This evaluation void prevents systematic understanding of model capabilities and principled guidance for improvement. We introduce Gen-ViRe (Generative Visual Reasoning Benchmark), a framework grounded in cognitive science and real-world AI applications, which decomposes CoF reasoning into six cognitive dimensions -- from perceptual logic to abstract planning -- and 24 subtasks. Through multi-source data curation, minimal prompting protocols, and hybrid VLM-assisted evaluation with detailed criteria, Gen-ViRe delivers the first quantitative assessment of video models as reasoners. Our experiments on SOTA systems reveal substantial discrepancies between impressive visual quality and actual reasoning depth, establishing baselines and diagnostic tools to advance genuine world simulators.
CPO: Condition Preference Optimization for Controllable Image Generation
Nov 06, 2025To enhance controllability in text-to-image generation, ControlNet introduces image-based control signals, while ControlNet++ improves pixel-level cycle consistency between generated images and the input control signal. To avoid the prohibitive cost of back-propagating through the sampling process, ControlNet++ optimizes only low-noise timesteps (e.g., $t < 200$) using a single-step approximation, which not only ignores the contribution of high-noise timesteps but also introduces additional approximation errors. A straightforward alternative for optimizing controllability across all timesteps is Direct Preference Optimization (DPO), a fine-tuning method that increases model preference for more controllable images ($I^{w}$) over less controllable ones ($I^{l}$). However, due to uncertainty in generative models, it is difficult to ensure that win--lose image pairs differ only in controllability while keeping other factors, such as image quality, fixed. To address this, we propose performing preference learning over control conditions rather than generated images. Specifically, we construct winning and losing control signals, $\mathbf{c}^{w}$ and $\mathbf{c}^{l}$, and train the model to prefer $\mathbf{c}^{w}$. This method, which we term \textit{Condition Preference Optimization} (CPO), eliminates confounding factors and yields a low-variance training objective. Our approach theoretically exhibits lower contrastive loss variance than DPO and empirically achieves superior results. Moreover, CPO requires less computation and storage for dataset curation. Extensive experiments show that CPO significantly improves controllability over the state-of-the-art ControlNet++ across multiple control types: over $10\%$ error rate reduction in segmentation, $70$--$80\%$ in human pose, and consistent $2$--$5\%$ reductions in edge and depth maps.
LEAM: A Prompt-only Large Language Model-enabled Antenna Modeling Method
Apr 25, 2025Antenna modeling is a time-consuming and complex process, decreasing the speed of antenna analysis and design. In this paper, a large language model (LLM)- enabled antenna modeling method, called LEAM, is presented to address this challenge. LEAM enables automatic antenna model generation based on language descriptions via prompt input, images, descriptions from academic papers, patents, and technical reports (either one or multiple). The effectiveness of LEAM is demonstrated by three examples: a Vivaldi antenna generated from a complete user description, a slotted patch antenna generated from an incomplete user description and the operating frequency, and a monopole slotted antenna generated from images and descriptions scanned from the literature. For all the examples, correct antenna models are generated in a few minutes. The code can be accessed via https://github.com/TaoWu974/LEAM.
Refining Salience-Aware Sparse Fine-Tuning Strategies for Language Models
Dec 18, 2024



Parameter-Efficient Fine-Tuning (PEFT) has gained prominence through low-rank adaptation methods like LoRA. In this paper, we focus on sparsity-based PEFT (SPEFT), which introduces trainable sparse adaptations to the weight matrices in the model, offering greater flexibility in selecting fine-tuned parameters compared to low-rank methods. We conduct the first systematic evaluation of salience metrics for SPEFT, inspired by zero-cost NAS proxies, and identify simple gradient-based metrics is reliable, and results are on par with the best alternatives, offering both computational efficiency and robust performance. Additionally, we compare static and dynamic masking strategies, finding that static masking, which predetermines non-zero entries before training, delivers efficiency without sacrificing performance, while dynamic masking offers no substantial benefits. Across NLP tasks, a simple gradient-based, static SPEFT consistently outperforms other fine-tuning methods for LLMs, providing a simple yet effective baseline for SPEFT. Our work challenges the notion that complexity is necessary for effective PEFT. Our work is open source and available to the community at [https://github.com/0-ml/speft].
MMAD-Purify: A Precision-Optimized Framework for Efficient and Scalable Multi-Modal Attacks
Oct 17, 2024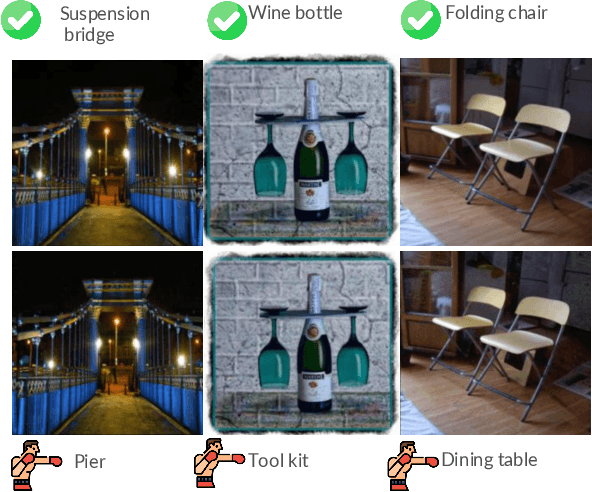

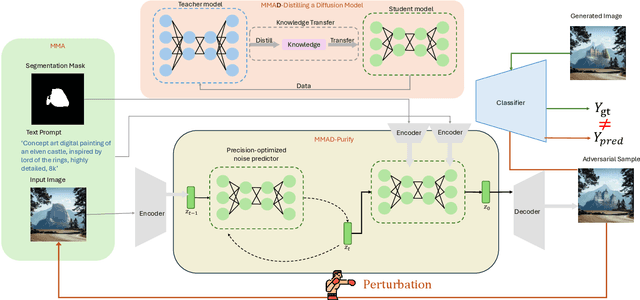
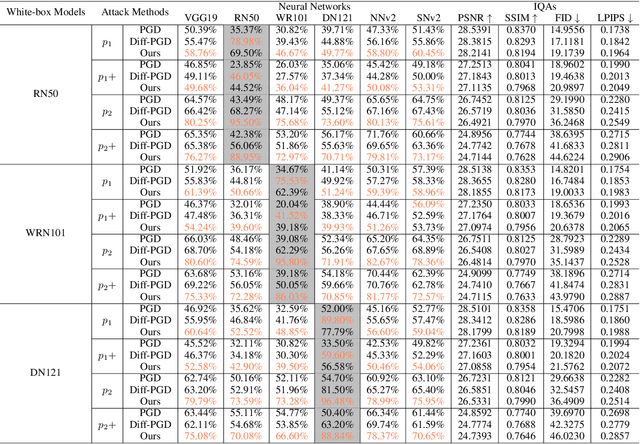
Neural networks have achieved remarkable performance across a wide range of tasks, yet they remain susceptible to adversarial perturbations, which pose significant risks in safety-critical applications. With the rise of multimodality, diffusion models have emerged as powerful tools not only for generative tasks but also for various applications such as image editing, inpainting, and super-resolution. However, these models still lack robustness due to limited research on attacking them to enhance their resilience. Traditional attack techniques, such as gradient-based adversarial attacks and diffusion model-based methods, are hindered by computational inefficiencies and scalability issues due to their iterative nature. To address these challenges, we introduce an innovative framework that leverages the distilled backbone of diffusion models and incorporates a precision-optimized noise predictor to enhance the effectiveness of our attack framework. This approach not only enhances the attack's potency but also significantly reduces computational costs. Our framework provides a cutting-edge solution for multi-modal adversarial attacks, ensuring reduced latency and the generation of high-fidelity adversarial examples with superior success rates. Furthermore, we demonstrate that our framework achieves outstanding transferability and robustness against purification defenses, outperforming existing gradient-based attack models in both effectiveness and efficiency.
Uni-ELF: A Multi-Level Representation Learning Framework for Electrolyte Formulation Design
Jul 08, 2024



Advancements in lithium battery technology heavily rely on the design and engineering of electrolytes. However, current schemes for molecular design and recipe optimization of electrolytes lack an effective computational-experimental closed loop and often fall short in accurately predicting diverse electrolyte formulation properties. In this work, we introduce Uni-ELF, a novel multi-level representation learning framework to advance electrolyte design. Our approach involves two-stage pretraining: reconstructing three-dimensional molecular structures at the molecular level using the Uni-Mol model, and predicting statistical structural properties (e.g., radial distribution functions) from molecular dynamics simulations at the mixture level. Through this comprehensive pretraining, Uni-ELF is able to capture intricate molecular and mixture-level information, which significantly enhances its predictive capability. As a result, Uni-ELF substantially outperforms state-of-the-art methods in predicting both molecular properties (e.g., melting point, boiling point, synthesizability) and formulation properties (e.g., conductivity, Coulombic efficiency). Moreover, Uni-ELF can be seamlessly integrated into an automatic experimental design workflow. We believe this innovative framework will pave the way for automated AI-based electrolyte design and engineering.
Localization Through Particle Filter Powered Neural Network Estimated Monocular Camera Poses
Apr 26, 2024The reduced cost and computational and calibration requirements of monocular cameras make them ideal positioning sensors for mobile robots, albeit at the expense of any meaningful depth measurement. Solutions proposed by some scholars to this localization problem involve fusing pose estimates from convolutional neural networks (CNNs) with pose estimates from geometric constraints on motion to generate accurate predictions of robot trajectories. However, the distribution of attitude estimation based on CNN is not uniform, resulting in certain translation problems in the prediction of robot trajectories. This paper proposes improving these CNN-based pose estimates by propagating a SE(3) uniform distribution driven by a particle filter. The particles utilize the same motion model used by the CNN, while updating their weights using CNN-based estimates. The results show that while the rotational component of pose estimation does not consistently improve relative to CNN-based estimation, the translational component is significantly more accurate. This factor combined with the superior smoothness of the filtered trajectories shows that the use of particle filters significantly improves the performance of CNN-based localization algorithms.
A Unified Positive-Unlabeled Learning Framework for Document-Level Relation Extraction with Different Levels of Labeling
Oct 17, 2022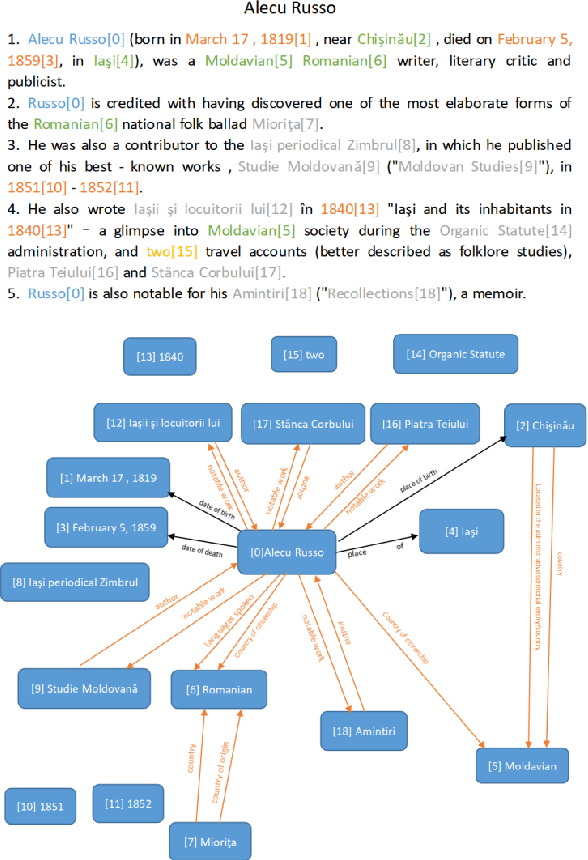
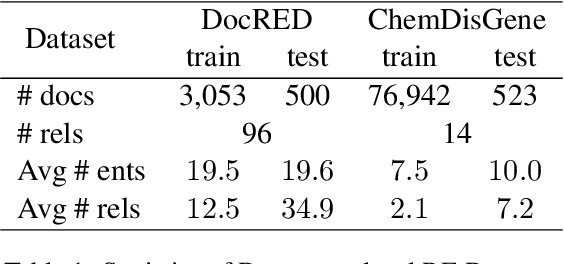
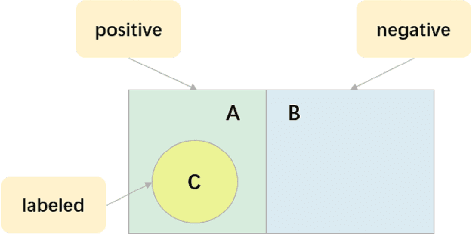
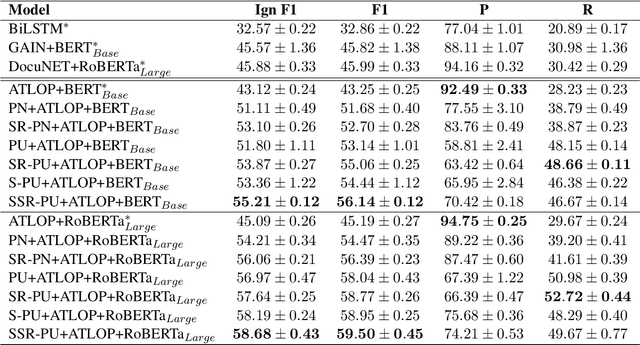
Document-level relation extraction (RE) aims to identify relations between entities across multiple sentences. Most previous methods focused on document-level RE under full supervision. However, in real-world scenario, it is expensive and difficult to completely label all relations in a document because the number of entity pairs in document-level RE grows quadratically with the number of entities. To solve the common incomplete labeling problem, we propose a unified positive-unlabeled learning framework - shift and squared ranking loss positive-unlabeled (SSR-PU) learning. We use positive-unlabeled (PU) learning on document-level RE for the first time. Considering that labeled data of a dataset may lead to prior shift of unlabeled data, we introduce a PU learning under prior shift of training data. Also, using none-class score as an adaptive threshold, we propose squared ranking loss and prove its Bayesian consistency with multi-label ranking metrics. Extensive experiments demonstrate that our method achieves an improvement of about 14 F1 points relative to the previous baseline with incomplete labeling. In addition, it outperforms previous state-of-the-art results under both fully supervised and extremely unlabeled settings as well.
Hybrid Noise Removal in Hyperspectral Imagery With a Spatial-Spectral Gradient Network
Oct 01, 2018
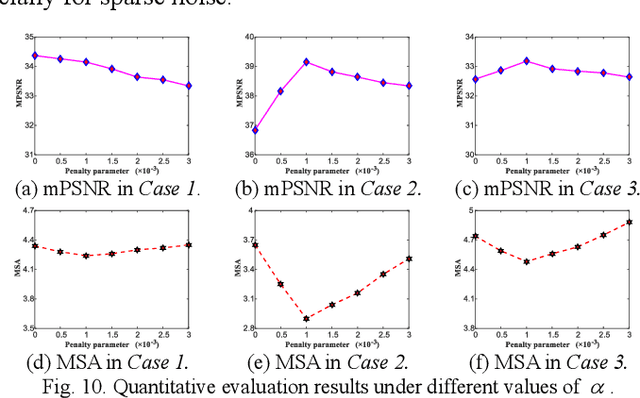


The existence of hybrid noise in hyperspectral images (HSIs) severely degrades the data quality, reduces the interpretation accuracy of HSIs, and restricts the subsequent HSIs applications. In this paper, the spatial-spectral gradient network (SSGN) is presented for mixed noise removal in HSIs. The proposed method employs a spatial-spectral gradient learning strategy, in consideration of the unique spatial structure directionality of sparse noise and spectral differences with additional complementary information for better extracting intrinsic and deep features of HSIs. Based on a fully cascaded multi-scale convolutional network, SSGN can simultaneously deal with the different types of noise in different HSIs or spectra by the use of the same model. The simulated and real-data experiments undertaken in this study confirmed that the proposed SSGN performs better at mixed noise removal than the other state-of-the-art HSI denoising algorithms, in evaluation indices, visual assessments, and time consumption.