 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRouteMoA: Dynamic Routing without Pre-Inference Boosts Efficient Mixture-of-Agents
Jan 26, 2026Mixture-of-Agents (MoA) improves LLM performance through layered collaboration, but its dense topology raises costs and latency. Existing methods employ LLM judges to filter responses, yet still require all models to perform inference before judging, failing to cut costs effectively. They also lack model selection criteria and struggle with large model pools, where full inference is costly and can exceed context limits. To address this, we propose RouteMoA, an efficient mixture-of-agents framework with dynamic routing. It employs a lightweight scorer to perform initial screening by predicting coarse-grained performance from the query, narrowing candidates to a high-potential subset without inference. A mixture of judges then refines these scores through lightweight self- and cross-assessment based on existing model outputs, providing posterior correction without additional inference. Finally, a model ranking mechanism selects models by balancing performance, cost, and latency. RouteMoA outperforms MoA across varying tasks and model pool sizes, reducing cost by 89.8% and latency by 63.6% in the large-scale model pool.
Expertise need not monopolize: Action-Specialized Mixture of Experts for Vision-Language-Action Learning
Oct 16, 2025Vision-Language-Action (VLA) models are experiencing rapid development and demonstrating promising capabilities in robotic manipulation tasks. However, scaling up VLA models presents several critical challenges: (1) Training new VLA models from scratch demands substantial computational resources and extensive datasets. Given the current scarcity of robot data, it becomes particularly valuable to fully leverage well-pretrained VLA model weights during the scaling process. (2) Real-time control requires carefully balancing model capacity with computational efficiency. To address these challenges, We propose AdaMoE, a Mixture-of-Experts (MoE) architecture that inherits pretrained weights from dense VLA models, and scales up the action expert by substituting the feedforward layers into sparsely activated MoE layers. AdaMoE employs a decoupling technique that decouples expert selection from expert weighting through an independent scale adapter working alongside the traditional router. This enables experts to be selected based on task relevance while contributing with independently controlled weights, allowing collaborative expert utilization rather than winner-takes-all dynamics. Our approach demonstrates that expertise need not monopolize. Instead, through collaborative expert utilization, we can achieve superior performance while maintaining computational efficiency. AdaMoE consistently outperforms the baseline model across key benchmarks, delivering performance gains of 1.8% on LIBERO and 9.3% on RoboTwin. Most importantly, a substantial 21.5% improvement in real-world experiments validates its practical effectiveness for robotic manipulation tasks.
Multi-Constraint Safe Reinforcement Learning via Closed-form Solution for Log-Sum-Exp Approximation of Control Barrier Functions
May 01, 2025

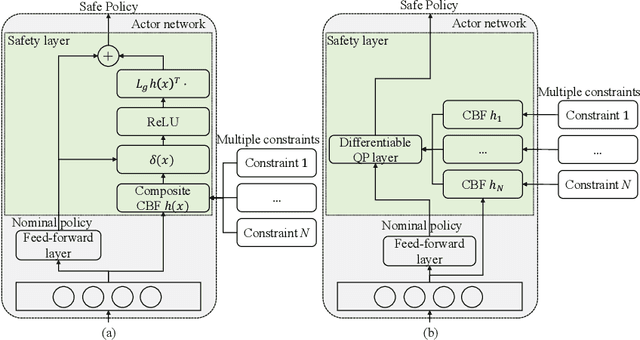
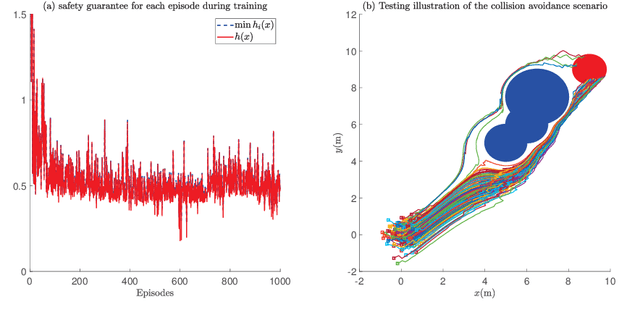
The safety of training task policies and their subsequent application using reinforcement learning (RL) methods has become a focal point in the field of safe RL. A central challenge in this area remains the establishment of theoretical guarantees for safety during both the learning and deployment processes. Given the successful implementation of Control Barrier Function (CBF)-based safety strategies in a range of control-affine robotic systems, CBF-based safe RL demonstrates significant promise for practical applications in real-world scenarios. However, integrating these two approaches presents several challenges. First, embedding safety optimization within the RL training pipeline requires that the optimization outputs be differentiable with respect to the input parameters, a condition commonly referred to as differentiable optimization, which is non-trivial to solve. Second, the differentiable optimization framework confronts significant efficiency issues, especially when dealing with multi-constraint problems. To address these challenges, this paper presents a CBF-based safe RL architecture that effectively mitigates the issues outlined above. The proposed approach constructs a continuous AND logic approximation for the multiple constraints using a single composite CBF. By leveraging this approximation, a close-form solution of the quadratic programming is derived for the policy network in RL, thereby circumventing the need for differentiable optimization within the end-to-end safe RL pipeline. This strategy significantly reduces computational complexity because of the closed-form solution while maintaining safety guarantees. Simulation results demonstrate that, in comparison to existing approaches relying on differentiable optimization, the proposed method significantly reduces training computational costs while ensuring provable safety throughout the training process.
A Graph-Enhanced DeepONet Approach for Real-Time Estimating Hydrogen-Enriched Natural Gas Flow under Variable Operations
Apr 09, 2025Blending green hydrogen into natural gas presents a promising approach for renewable energy integration and fuel decarbonization. Accurate estimation of hydrogen fraction in hydrogen-enriched natural gas (HENG) pipeline networks is crucial for operational safety and efficiency, yet it remains challenging due to complex dynamics. While existing data-driven approaches adopt end-to-end architectures for HENG flow state estimation, their limited adaptability to varying operational conditions hinders practical applications. To this end, this study proposes a graph-enhanced DeepONet framework for the real-time estimation of HENG flow, especially hydrogen fractions. First, a dual-network architecture, called branch network and trunk network, is employed to characterize operational conditions and sparse sensor measurements to estimate the HENG state at targeted locations and time points. Second, a graph-enhance branch network is proposed to incorporate pipeline topology, improving the estimation accuracy in large-scale pipeline networks. Experimental results demonstrate that the proposed method achieves superior estimation accuracy for HCNG flow under varying operational conditions compared to conventional approaches.
Hierarchical Learning for IRS-Assisted MEC Systems with Rate-Splitting Multiple Access
Dec 05, 2024Intelligent reflecting surface (IRS)-assisted mobile edge computing (MEC) systems have shown notable improvements in efficiency, such as reduced latency, higher data rates, and better energy efficiency. However, the resource competition among users will lead to uneven allocation, increased latency, and lower throughput. Fortunately, the rate-splitting multiple access (RSMA) technique has emerged as a promising solution for managing interference and optimizing resource allocation in MEC systems. This paper studies an IRS-assisted MEC system with RSMA, aiming to jointly optimize the passive beamforming of the IRS, the active beamforming of the base station, the task offloading allocation, the transmit power of users, the ratios of public and private information allocation, and the decoding order of the RSMA to minimize the average delay from a novel uplink transmission perspective. Since the formulated problem is non-convex and the optimization variables are highly coupled, we propose a hierarchical deep reinforcement learning-based algorithm to optimize both continuous and discrete variables of the problem. Additionally, to better extract channel features, we design a novel network architecture within the policy and evaluation networks of the proposed algorithm, combining convolutional neural networks and densely connected convolutional network for feature extraction. Simulation results indicate that the proposed algorithm not only exhibits excellent convergence performance but also outperforms various benchmarks.
UAV-Enabled Data Collection for IoT Networks via Rainbow Learning
Sep 22, 2024


Unmanned aerial vehicles (UAVs) assisted Internet of things (IoT) systems have become an important part of future wireless communications. To achieve higher communication rate, the joint design of UAV trajectory and resource allocation is crucial. This letter considers a scenario where a multi-antenna UAV is dispatched to simultaneously collect data from multiple ground IoT nodes (GNs) within a time interval. To improve the sum data collection (SDC) volume, i.e., the total data volume transmitted by the GNs, the UAV trajectory, the UAV receive beamforming, the scheduling of the GNs, and the transmit power of the GNs are jointly optimized. Since the problem is non-convex and the optimization variables are highly coupled, it is hard to solve using traditional optimization methods. To find a near-optimal solution, a double-loop structured optimization-driven deep reinforcement learning (DRL) algorithm and a fully DRL-based algorithm are proposed to solve the problem effectively. Simulation results verify that the proposed algorithms outperform two benchmarks with significant improvement in SDC volumes.
Joint Association, Beamforming, and Resource Allocation for Multi-IRS Enabled MU-MISO Systems With RSMA
Jun 05, 2024



Intelligent reflecting surface (IRS) and rate-splitting multiple access (RSMA) technologies are at the forefront of enhancing spectrum and energy efficiency in the next generation multi-antenna communication systems. This paper explores a RSMA system with multiple IRSs, and proposes two purpose-driven scheduling schemes, i.e., the exhaustive IRS-aided (EIA) and opportunistic IRS-aided (OIA) schemes. The aim is to optimize the system weighted energy efficiency (EE) under the above two schemes, respectively. Specifically, the Dinkelbach, branch and bound, successive convex approximation, and the semidefinite relaxation methods are exploited within the alternating optimization framework to obtain effective solutions to the considered problems. The numerical findings indicate that the EIA scheme exhibits better performance compared to the OIA scheme in diverse scenarios when considering the weighted EE, and the proposed algorithm demonstrates superior performance in comparison to the baseline algorithms.
Enlighten-Your-Voice: When Multimodal Meets Zero-shot Low-light Image Enhancement
Dec 15, 2023



Low-light image enhancement is a crucial visual task, and many unsupervised methods tend to overlook the degradation of visible information in low-light scenes, which adversely affects the fusion of complementary information and hinders the generation of satisfactory results. To address this, our study introduces ``Enlighten-Your-Voice'', a multimodal enhancement framework that innovatively enriches user interaction through voice and textual commands. This approach does not merely signify a technical leap but also represents a paradigm shift in user engagement. Our model is equipped with a Dual Collaborative Attention Module (DCAM) that meticulously caters to distinct content and color discrepancies, thereby facilitating nuanced enhancements. Complementarily, we introduce a Semantic Feature Fusion (SFM) plug-and-play module that synergizes semantic context with low-light enhancement operations, sharpening the algorithm's efficacy. Crucially, ``Enlighten-Your-Voice'' showcases remarkable generalization in unsupervised zero-shot scenarios. The source code can be accessed from https://github.com/zhangbaijin/Enlighten-Your-Voice
I Can Read Your Mind: Control Mechanism Secrecy of Networked Dynamical Systems under Inference Attacks
May 07, 2022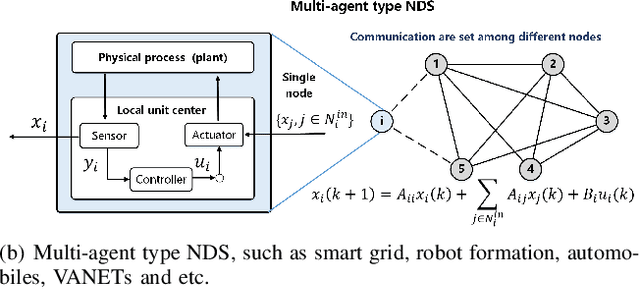
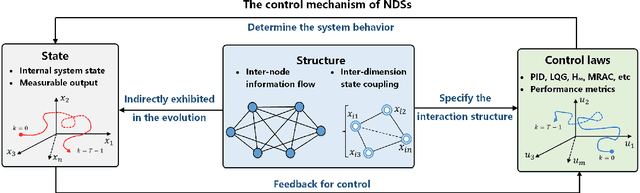
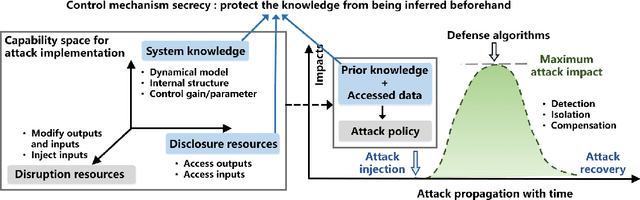
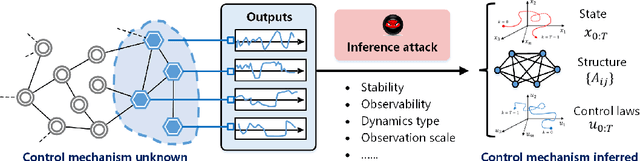
Recent years have witnessed the fast advance of security research for networked dynamical system (NDS). Considering the latest inference attacks that enable stealthy and precise attacks into NDSs with observation-based learning, this article focuses on a new security aspect, i.e., how to protect control mechanism secrets from inference attacks, including state information, interaction structure and control laws. We call this security property as control mechanism secrecy, which provides protection of the vulnerabilities in the control process and fills the defense gap that traditional cyber security cannot handle. Since the knowledge of control mechanism defines the capabilities to implement attacks, ensuring control mechanism secrecy needs to go beyond the conventional data privacy to cover both transmissible data and intrinsic models in NDSs. The prime goal of this article is to summarize recent results of both inference attacks on control mechanism secrets and countermeasures. We first introduce the basic inference attack methods on the state and structure of NDSs, respectively, along with their inference performance bounds. Then, the corresponding countermeasures and performance metrics are given to illustrate how to preserve the control mechanism secrecy. Necessary conditions are derived to guide the secrecy design. Finally, thorough discussions on the control laws and open issues are presented, beckoning future investigation on reliable countermeasure design and tradeoffs between the secrecy and control performance.
Local Topology Inference of Mobile Robotic Networks under Formation Control
Apr 30, 2022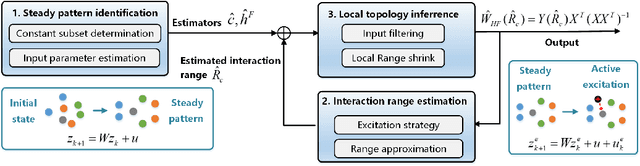
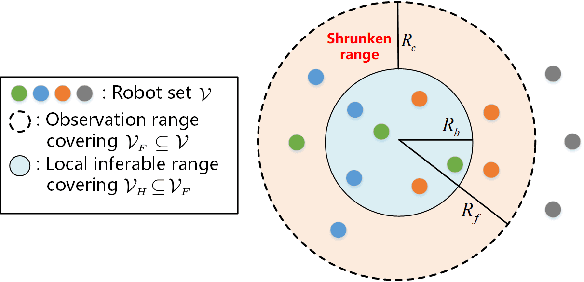
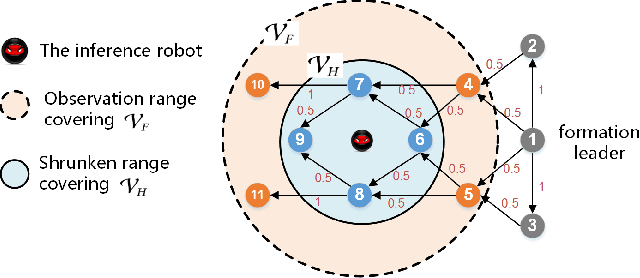
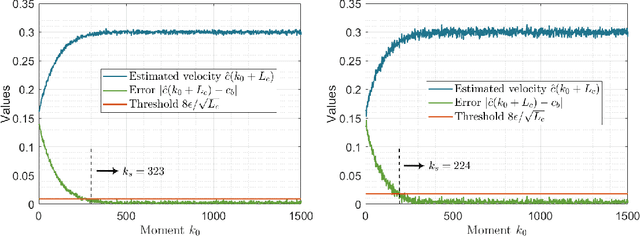
The interaction topology is critical for efficient cooperation of mobile robotic networks (MRNs). We focus on the local topology inference problem of MRNs under formation control, where an inference robot with limited observation range can manoeuvre among the formation robots. This problem faces new challenges brought by the highly coupled influence of unobservable formation robots, inaccessible formation inputs, and unknown interaction range. The novel idea here is to advocate a range-shrink strategy to perfectly avoid the influence of unobservable robots while filtering the input. To that end, we develop consecutive algorithms to determine a feasible constant robot subset from the changing robot set within the observation range, and estimate the formation input and the interaction range. Then, an ordinary least squares based local topology estimator is designed with the previously inferred information. Resorting to the concentration measure, we prove the convergence rate and accuracy of the proposed estimator, taking the estimation errors of previous steps into account. Extensions on nonidentical observation slots and more complicated scenarios are also analyzed. Comprehensive simulation tests and method comparisons corroborate the theoretical findings.