 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Air-to-Ground Wireless Channel Modeling Using Environmental Context and Generative Diffusion
Mar 24, 2026The fast motion of Low Earth Orbit (LEO) satellites causes the propagation channel to vary rapidly, and its behavior is strongly shaped by the surrounding environment, especially at low elevation angles where signals are highly susceptible to terrain blockage and other environmental effects. Existing studies mostly rely on assumed statistical channel distributions and therefore ignore the influence of the actual geographic environment. In this paper, we propose an environment-aware channel modeling method for air-to-ground wireless links. We leverage real environmental data, including digital elevation models (DEMs) and land cover information, together with ray tracing (RT) to determine whether a link is line-of-sight (LOS) or non-line-of-sight (NLOS) and to identify possible reflection paths of the signal. The resulting obstruction and reflection profiles are then combined with models of diffraction loss, vegetation absorption, and atmospheric attenuation to quantitatively characterize channel behavior in realistic geographic environments. Since RT is computationally intensive, we use RT-generated samples and environmental features to train a scalable diffusion model that can efficiently predict channel performance for arbitrary satellite and ground terminal positions, thereby supporting real-time decision-making. In the experiments, we validate the proposed model with measurement data from both cellular and LEO satellite links, demonstrating its effectiveness in realistic environments.
FLAD: Federated Learning for LLM-based Autonomous Driving in Vehicle-Edge-Cloud Networks
Nov 12, 2025Large Language Models (LLMs) have impressive data fusion and reasoning capabilities for autonomous driving (AD). However, training LLMs for AD faces significant challenges including high computation transmission costs, and privacy concerns associated with sensitive driving data. Federated Learning (FL) is promising for enabling autonomous vehicles (AVs) to collaboratively train models without sharing raw data. We present Federated LLM-based Autonomous Driving (FLAD), an FL framework that leverages distributed multimodal sensory data across AVs in heterogeneous environment. FLAD has three key innovations: (1) a cloud-edge-vehicle collaborative architecture that reduces communication delay and preserving data privacy; (2) an intelligent parallelized collaborative training with a communication scheduling mechanism that optimizes training efficiency, leveraging end-devices otherwise having insufficient resources for model training; and (3) a knowledge distillation method that personalizes LLM according to heterogeneous edge data. In addition, we prototype FLAD in a testbed with NVIDIA Jetsons, overcoming practical implementation challenges including CPU/GPU memory sharing in resource-constrained devices, dynamic model partitions, and fault-tolerant training.Extensive experimental evaluation demonstrates that FLAD achieves superior end-to-end AD performance while efficiently utilizing distributed vehicular resources, opening up new possibilities for future collaborative AD model training and knowledge sharing.
Adaptive Nesterov Accelerated Distributional Deep Hedging for Efficient Volatility Risk Management
Feb 25, 2025
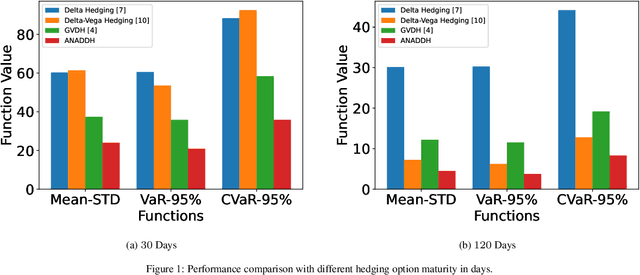
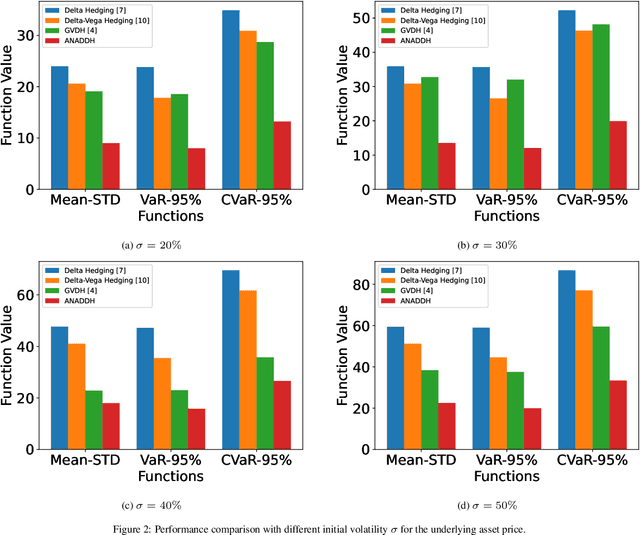
In the field of financial derivatives trading, managing volatility risk is crucial for protecting investment portfolios from market changes. Traditional Vega hedging strategies, which often rely on basic and rule-based models, are hard to adapt well to rapidly changing market conditions. We introduce a new framework for dynamic Vega hedging, the Adaptive Nesterov Accelerated Distributional Deep Hedging (ANADDH), which combines distributional reinforcement learning with a tailored design based on adaptive Nesterov acceleration. This approach improves the learning process in complex financial environments by modeling the hedging efficiency distribution, providing a more accurate and responsive hedging strategy. The design of adaptive Nesterov acceleration refines gradient momentum adjustments, significantly enhancing the stability and speed of convergence of the model. Through empirical analysis and comparisons, our method demonstrates substantial performance gains over existing hedging techniques. Our results confirm that this innovative combination of distributional reinforcement learning with the proposed optimization techniques improves financial risk management and highlights the practical benefits of implementing advanced neural network architectures in the finance sector.
Robust and Efficient Deep Hedging via Linearized Objective Neural Network
Feb 25, 2025
Deep hedging represents a cutting-edge approach to risk management for financial derivatives by leveraging the power of deep learning. However, existing methods often face challenges related to computational inefficiency, sensitivity to noisy data, and optimization complexity, limiting their practical applicability in dynamic and volatile markets. To address these limitations, we propose Deep Hedging with Linearized-objective Neural Network (DHLNN), a robust and generalizable framework that enhances the training procedure of deep learning models. By integrating a periodic fixed-gradient optimization method with linearized training dynamics, DHLNN stabilizes the training process, accelerates convergence, and improves robustness to noisy financial data. The framework incorporates trajectory-wide optimization and Black-Scholes Delta anchoring, ensuring alignment with established financial theory while maintaining flexibility to adapt to real-world market conditions. Extensive experiments on synthetic and real market data validate the effectiveness of DHLNN, demonstrating its ability to achieve faster convergence, improved stability, and superior hedging performance across diverse market scenarios.
Robust Federated Learning with Global Sensitivity Estimation for Financial Risk Management
Feb 24, 2025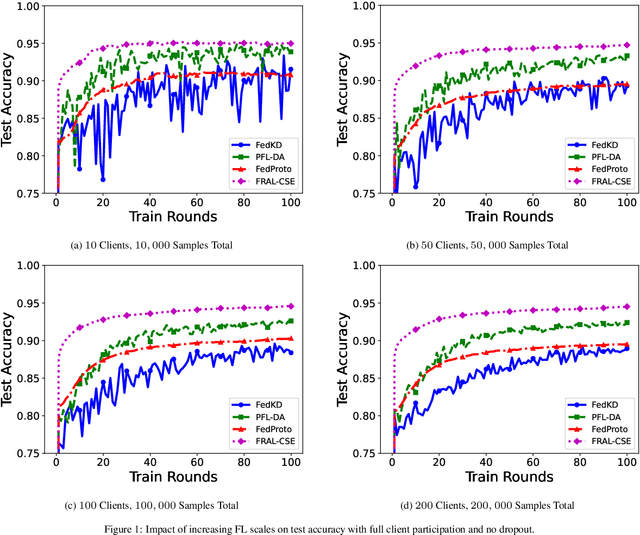
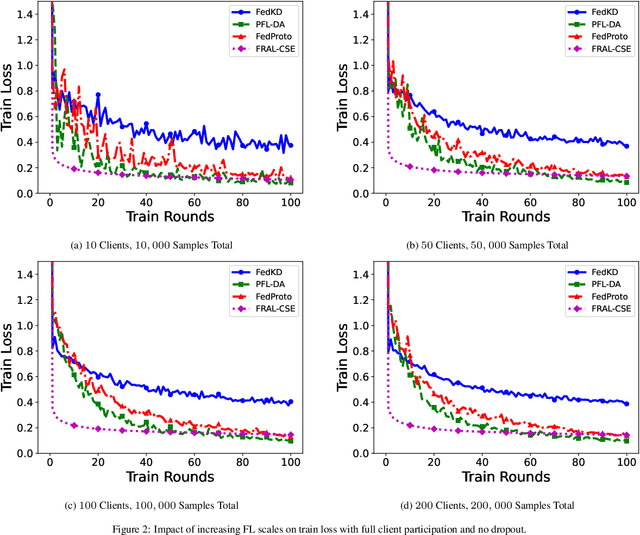
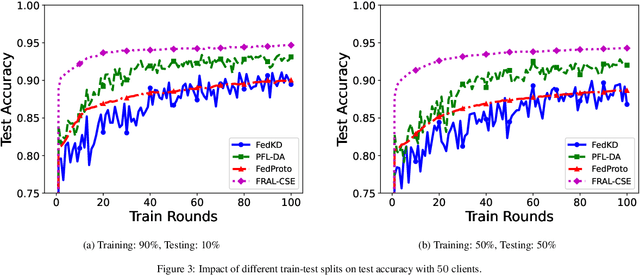
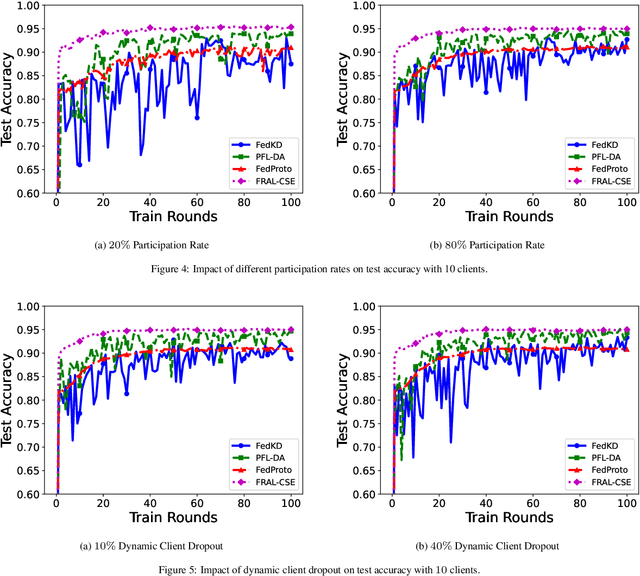
In decentralized financial systems, robust and efficient Federated Learning (FL) is promising to handle diverse client environments and ensure resilience to systemic risks. We propose Federated Risk-Aware Learning with Central Sensitivity Estimation (FRAL-CSE), an innovative FL framework designed to enhance scalability, stability, and robustness in collaborative financial decision-making. The framework's core innovation lies in a central acceleration mechanism, guided by a quadratic sensitivity-based approximation of global model dynamics. By leveraging local sensitivity information derived from robust risk measurements, FRAL-CSE performs a curvature-informed global update that efficiently incorporates second-order information without requiring repeated local re-evaluations, thereby enhancing training efficiency and improving optimization stability. Additionally, distortion risk measures are embedded into the training objectives to capture tail risks and ensure robustness against extreme scenarios. Extensive experiments validate the effectiveness of FRAL-CSE in accelerating convergence and improving resilience across heterogeneous datasets compared to state-of-the-art baselines.
Performance Analysis of Uplink/Downlink Decoupled Access in Cellular-V2X Networks
May 10, 2024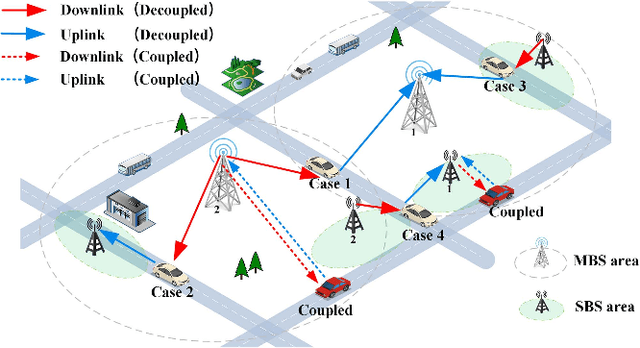
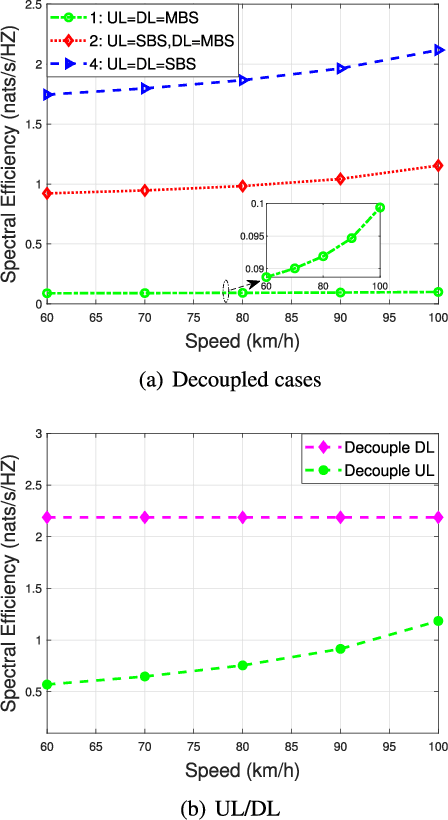
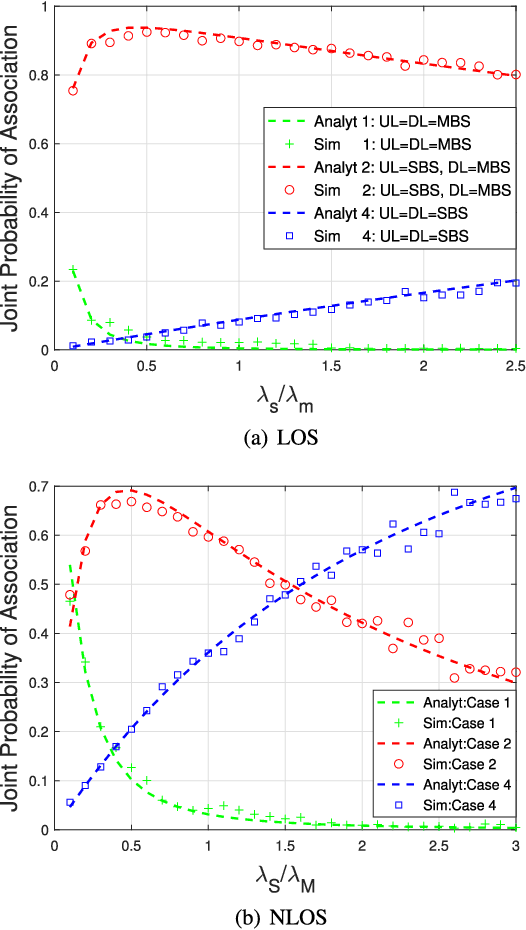
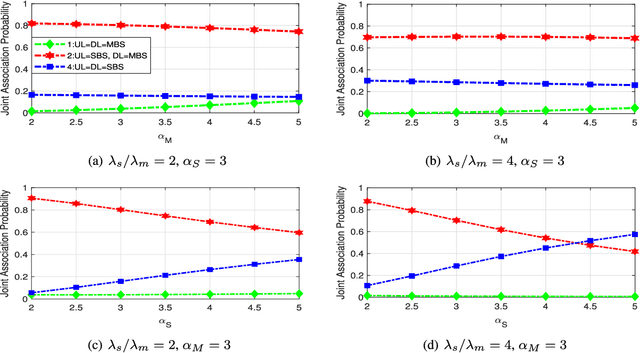
This paper firstly develops an analytical framework to investigate the performance of uplink (UL) / downlink (DL) decoupled access in cellular vehicle-to-everything (C-V2X) networks, in which a vehicle's UL/DL can be connected to different macro/small base stations (MBSs/SBSs) separately. Using the stochastic geometry analytical tool, the UL/DL decoupled access C-V2X is modeled as a Cox process, and we obtain the following theoretical results, i.e., 1) the probability of different UL/DL joint association cases i.e., both the UL and DL are associated with the different MBSs or SBSs, or they are associated with different types of BSs; 2) the distance distribution of a vehicle to its serving BSs in each case; 3) the spectral efficiency of UL/DL in each case; and 4) the UL/DL coverage probability of MBS/SBS. The analyses reveal the insights and performance gain of UL/DL decoupled access. Through extensive simulations, \textcolor{black}{the accuracy of the proposed analytical framework is validated.} Both the analytical and simulation results show that UL/DL decoupled access can improve spectral efficiency. The theoretical results can be directly used for estimating the statistical performance of a UL/DL decoupled access C-V2X network.
* 15 pages, 10 figures
I Can Read Your Mind: Control Mechanism Secrecy of Networked Dynamical Systems under Inference Attacks
May 07, 2022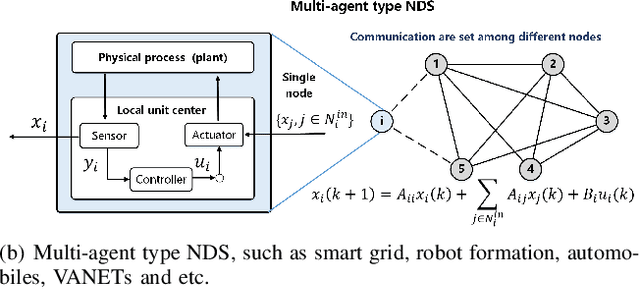
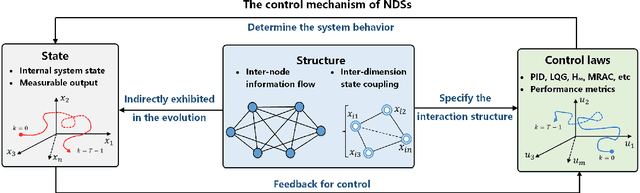
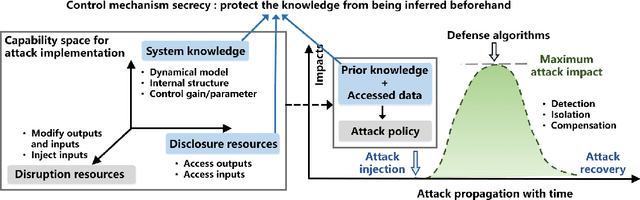
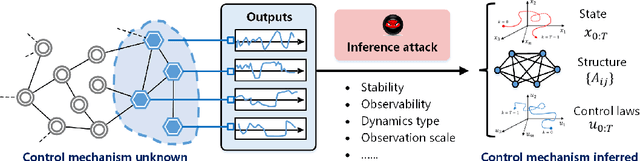
Recent years have witnessed the fast advance of security research for networked dynamical system (NDS). Considering the latest inference attacks that enable stealthy and precise attacks into NDSs with observation-based learning, this article focuses on a new security aspect, i.e., how to protect control mechanism secrets from inference attacks, including state information, interaction structure and control laws. We call this security property as control mechanism secrecy, which provides protection of the vulnerabilities in the control process and fills the defense gap that traditional cyber security cannot handle. Since the knowledge of control mechanism defines the capabilities to implement attacks, ensuring control mechanism secrecy needs to go beyond the conventional data privacy to cover both transmissible data and intrinsic models in NDSs. The prime goal of this article is to summarize recent results of both inference attacks on control mechanism secrets and countermeasures. We first introduce the basic inference attack methods on the state and structure of NDSs, respectively, along with their inference performance bounds. Then, the corresponding countermeasures and performance metrics are given to illustrate how to preserve the control mechanism secrecy. Necessary conditions are derived to guide the secrecy design. Finally, thorough discussions on the control laws and open issues are presented, beckoning future investigation on reliable countermeasure design and tradeoffs between the secrecy and control performance.
Local Topology Inference of Mobile Robotic Networks under Formation Control
Apr 30, 2022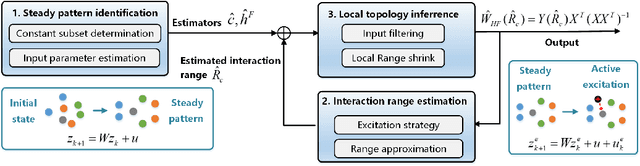
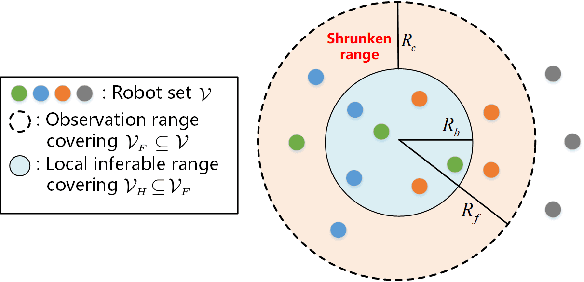
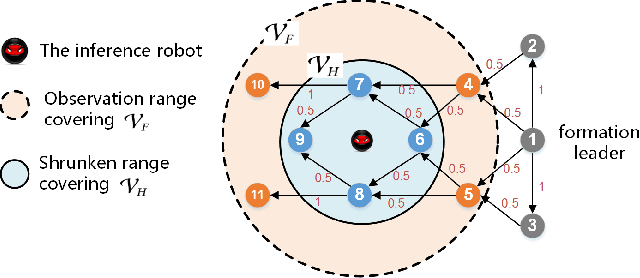
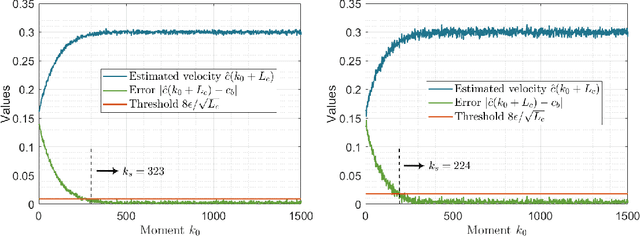
The interaction topology is critical for efficient cooperation of mobile robotic networks (MRNs). We focus on the local topology inference problem of MRNs under formation control, where an inference robot with limited observation range can manoeuvre among the formation robots. This problem faces new challenges brought by the highly coupled influence of unobservable formation robots, inaccessible formation inputs, and unknown interaction range. The novel idea here is to advocate a range-shrink strategy to perfectly avoid the influence of unobservable robots while filtering the input. To that end, we develop consecutive algorithms to determine a feasible constant robot subset from the changing robot set within the observation range, and estimate the formation input and the interaction range. Then, an ordinary least squares based local topology estimator is designed with the previously inferred information. Resorting to the concentration measure, we prove the convergence rate and accuracy of the proposed estimator, taking the estimation errors of previous steps into account. Extensions on nonidentical observation slots and more complicated scenarios are also analyzed. Comprehensive simulation tests and method comparisons corroborate the theoretical findings.
3D Magic Mirror: Automatic Video to 3D Caricature Translation
Jun 03, 2019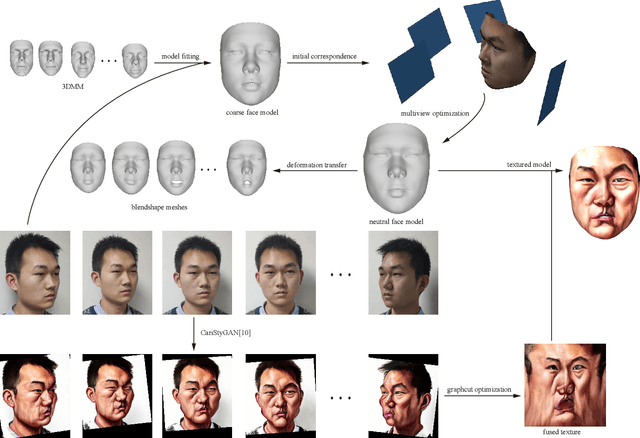
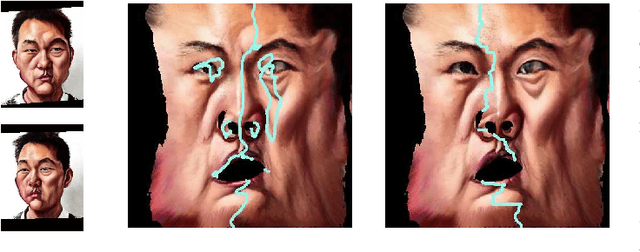
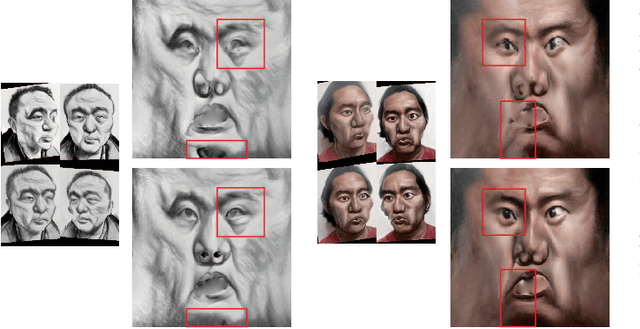
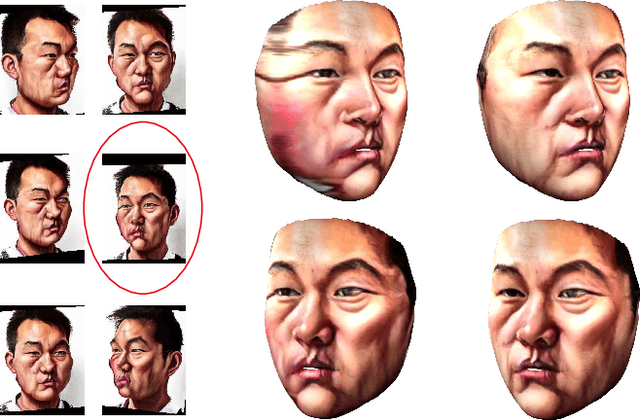
Caricature is an abstraction of a real person which distorts or exaggerates certain features, but still retains a likeness. While most existing works focus on 3D caricature reconstruction from 2D caricatures or translating 2D photos to 2D caricatures, this paper presents a real-time and automatic algorithm for creating expressive 3D caricatures with caricature style texture map from 2D photos or videos. To solve this challenging ill-posed reconstruction problem and cross-domain translation problem, we first reconstruct the 3D face shape for each frame, and then translate 3D face shape from normal style to caricature style by a novel identity and expression preserving VAE-CycleGAN. Based on a labeling formulation, the caricature texture map is constructed from a set of multi-view caricature images generated by CariGANs. The effectiveness and efficiency of our method are demonstrated by comparison with baseline implementations. The perceptual study shows that the 3D caricatures generated by our method meet people's expectations of 3D caricature style.
Self-supervised CNN for Unconstrained 3D Facial Performance Capture from an RGB-D Camera
Aug 17, 2018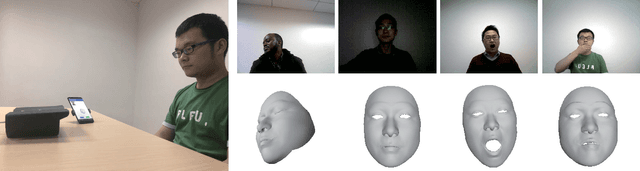
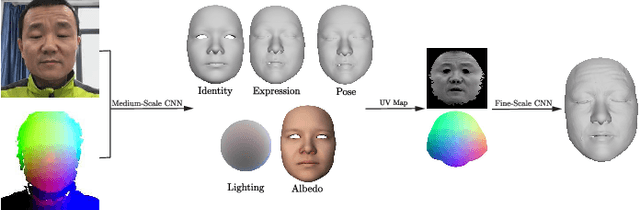
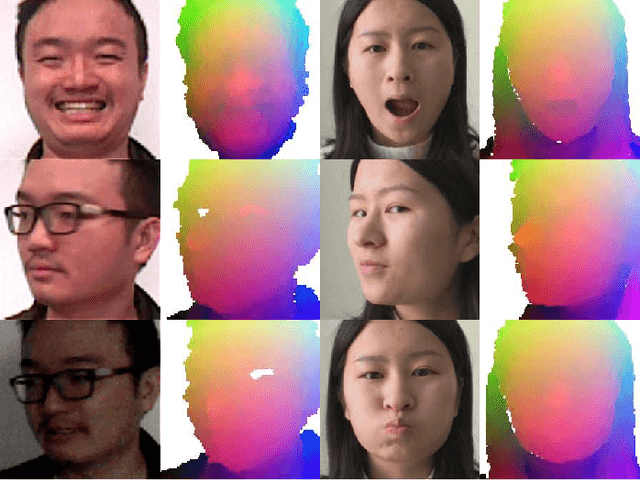
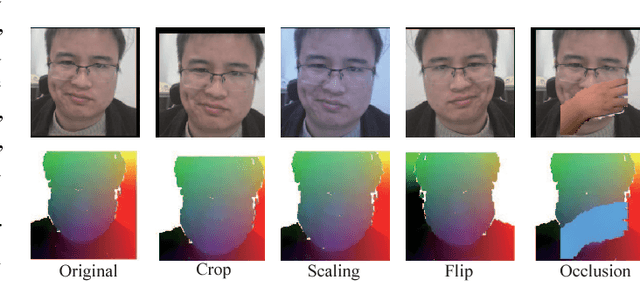
We present a novel method for real-time 3D facial performance capture with consumer-level RGB-D sensors. Our capturing system is targeted at robust and stable 3D face capturing in the wild, in which the RGB-D facial data contain noise, imperfection and occlusion, and often exhibit high variability in motion, pose, expression and lighting conditions, thus posing great challenges. The technical contribution is a self-supervised deep learning framework, which is trained directly from raw RGB-D data. The key novelties include: (1) learning both the core tensor and the parameters for refining our parametric face model; (2) using vertex displacement and UV map for learning surface detail; (3) designing the loss function by incorporating temporal coherence and same identity constraints based on pairs of RGB-D images and utilizing sparse norms, in addition to the conventional terms for photo-consistency, feature similarity, regularization as well as geometry consistency; and (4) augmenting the training data set in new ways. The method is demonstrated in a live setup that runs in real-time on a smartphone and an RGB-D sensor. Extensive experiments show that our method is robust to severe occlusion, fast motion, large rotation, exaggerated facial expressions and diverse lighting.