 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan LLMs See Without Pixels? Benchmarking Spatial Intelligence from Textual Descriptions
Jan 07, 2026Recent advancements in Spatial Intelligence (SI) have predominantly relied on Vision-Language Models (VLMs), yet a critical question remains: does spatial understanding originate from visual encoders or the fundamental reasoning backbone? Inspired by this question, we introduce SiT-Bench, a novel benchmark designed to evaluate the SI performance of Large Language Models (LLMs) without pixel-level input, comprises over 3,800 expert-annotated items across five primary categories and 17 subtasks, ranging from egocentric navigation and perspective transformation to fine-grained robotic manipulation. By converting single/multi-view scenes into high-fidelity, coordinate-aware textual descriptions, we challenge LLMs to perform symbolic textual reasoning rather than visual pattern matching. Evaluation results of state-of-the-art (SOTA) LLMs reveals that while models achieve proficiency in localized semantic tasks, a significant "spatial gap" remains in global consistency. Notably, we find that explicit spatial reasoning significantly boosts performance, suggesting that LLMs possess latent world-modeling potential. Our proposed dataset SiT-Bench serves as a foundational resource to foster the development of spatially-grounded LLM backbones for future VLMs and embodied agents. Our code and benchmark will be released at https://github.com/binisalegend/SiT-Bench .
Beyond Flatlands: Unlocking Spatial Intelligence by Decoupling 3D Reasoning from Numerical Regression
Nov 18, 2025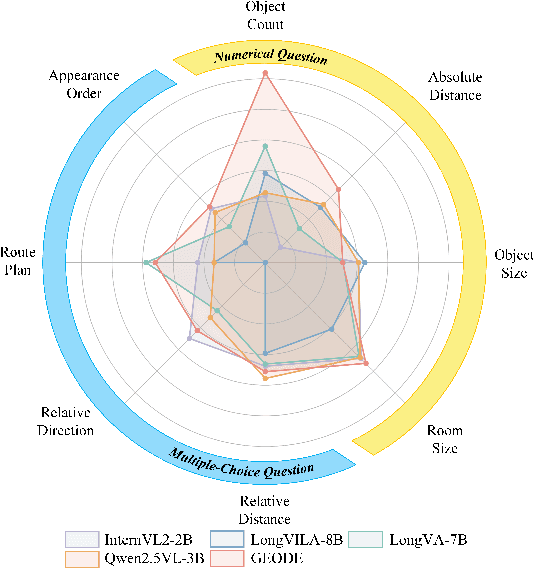
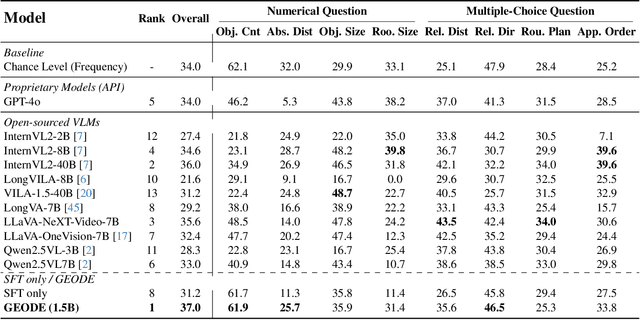
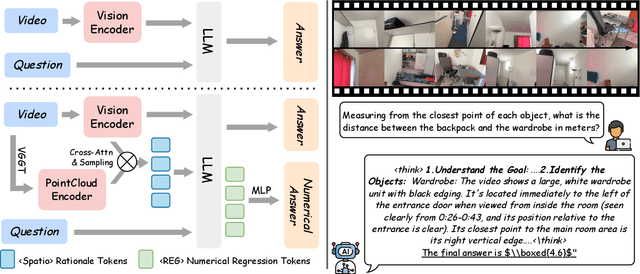
Existing Vision Language Models (VLMs) architecturally rooted in "flatland" perception, fundamentally struggle to comprehend real-world 3D spatial intelligence. This failure stems from a dual-bottleneck: input-stage conflict between computationally exorbitant geometric-aware encoders and superficial 2D-only features, and output-stage misalignment where discrete tokenizers are structurally incapable of producing precise, continuous numerical values. To break this impasse, we introduce GEODE (Geometric-Output and Decoupled-Input Engine), a novel architecture that resolves this dual-bottleneck by decoupling 3D reasoning from numerical generation. GEODE augments main VLM with two specialized, plug-and-play modules: Decoupled Rationale Module (DRM) that acts as spatial co-processor, aligning explicit 3D data with 2D visual features via cross-attention and distilling spatial Chain-of-Thought (CoT) logic into injectable Rationale Tokens; and Direct Regression Head (DRH), an "Embedding-as-Value" paradigm which routes specialized control tokens to a lightweight MLP for precise, continuous regression of scalars and 3D bounding boxes. The synergy of these modules allows our 1.5B parameter model to function as a high-level semantic dispatcher, achieving state-of-the-art spatial reasoning performance that rivals 7B+ models.
Adaptive Detection of Fast Moving Celestial Objects Using a Mixture of Experts and Physical-Inspired Neural Network
Apr 10, 2025Fast moving celestial objects are characterized by velocities across the celestial sphere that significantly differ from the motions of background stars. In observational images, these objects exhibit distinct shapes, contrasting with the typical appearances of stars. Depending on the observational method employed, these celestial entities may be designated as near-Earth objects or asteroids. Historically, fast moving celestial objects have been observed using ground-based telescopes, where the relative stability of stars and Earth facilitated effective image differencing techniques alongside traditional fast moving celestial object detection and classification algorithms. However, the growing prevalence of space-based telescopes, along with their diverse observational modes, produces images with different properties, rendering conventional methods less effective. This paper presents a novel algorithm for detecting fast moving celestial objects within star fields. Our approach enhances state-of-the-art fast moving celestial object detection neural networks by transforming them into physical-inspired neural networks. These neural networks leverage the point spread function of the telescope and the specific observational mode as prior information; they can directly identify moving fast moving celestial objects within star fields without requiring additional training, thereby addressing the limitations of traditional techniques. Additionally, all neural networks are integrated using the mixture of experts technique, forming a comprehensive fast moving celestial object detection algorithm. We have evaluated our algorithm using simulated observational data that mimics various observations carried out by space based telescope scenarios and real observation images. Results demonstrate that our method effectively detects fast moving celestial objects across different observational modes.
A Data-Driven Approach for Mitigating Dark Current Noise and Bad Pixels in Complementary Metal Oxide Semiconductor Cameras for Space-based Telescopes
Mar 15, 2024In recent years, there has been a gradual increase in the performance of Complementary Metal Oxide Semiconductor (CMOS) cameras. These cameras have gained popularity as a viable alternative to charge-coupled device (CCD) cameras in a wide range of applications. One particular application is the CMOS camera installed in small space telescopes. However, the limited power and spatial resources available on satellites present challenges in maintaining ideal observation conditions, including temperature and radiation environment. Consequently, images captured by CMOS cameras are susceptible to issues such as dark current noise and defective pixels. In this paper, we introduce a data-driven framework for mitigating dark current noise and bad pixels for CMOS cameras. Our approach involves two key steps: pixel clustering and function fitting. During pixel clustering step, we identify and group pixels exhibiting similar dark current noise properties. Subsequently, in the function fitting step, we formulate functions that capture the relationship between dark current and temperature, as dictated by the Arrhenius law. Our framework leverages ground-based test data to establish distinct temperature-dark current relations for pixels within different clusters. The cluster results could then be utilized to estimate the dark current noise level and detect bad pixels from real observational data. To assess the effectiveness of our approach, we have conducted tests using real observation data obtained from the Yangwang-1 satellite, equipped with a near-ultraviolet telescope and an optical telescope. The results show a considerable improvement in the detection efficiency of space-based telescopes.
I Can Read Your Mind: Control Mechanism Secrecy of Networked Dynamical Systems under Inference Attacks
May 07, 2022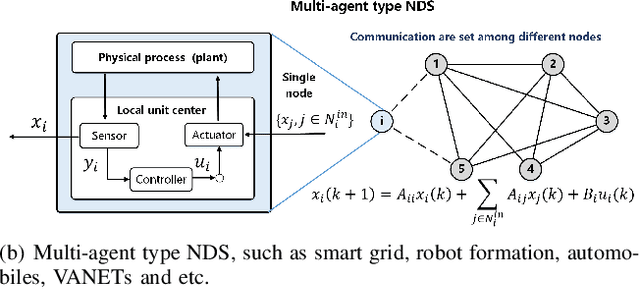
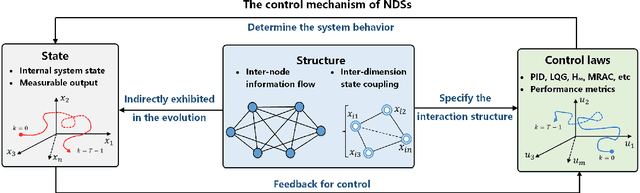
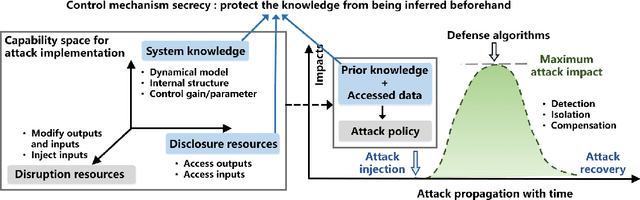
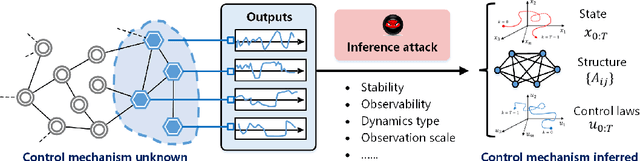
Recent years have witnessed the fast advance of security research for networked dynamical system (NDS). Considering the latest inference attacks that enable stealthy and precise attacks into NDSs with observation-based learning, this article focuses on a new security aspect, i.e., how to protect control mechanism secrets from inference attacks, including state information, interaction structure and control laws. We call this security property as control mechanism secrecy, which provides protection of the vulnerabilities in the control process and fills the defense gap that traditional cyber security cannot handle. Since the knowledge of control mechanism defines the capabilities to implement attacks, ensuring control mechanism secrecy needs to go beyond the conventional data privacy to cover both transmissible data and intrinsic models in NDSs. The prime goal of this article is to summarize recent results of both inference attacks on control mechanism secrets and countermeasures. We first introduce the basic inference attack methods on the state and structure of NDSs, respectively, along with their inference performance bounds. Then, the corresponding countermeasures and performance metrics are given to illustrate how to preserve the control mechanism secrecy. Necessary conditions are derived to guide the secrecy design. Finally, thorough discussions on the control laws and open issues are presented, beckoning future investigation on reliable countermeasure design and tradeoffs between the secrecy and control performance.
Local Topology Inference of Mobile Robotic Networks under Formation Control
Apr 30, 2022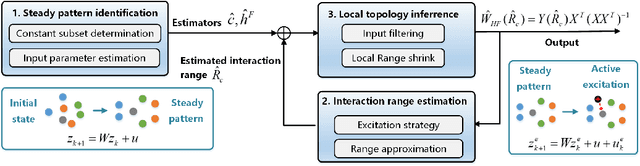
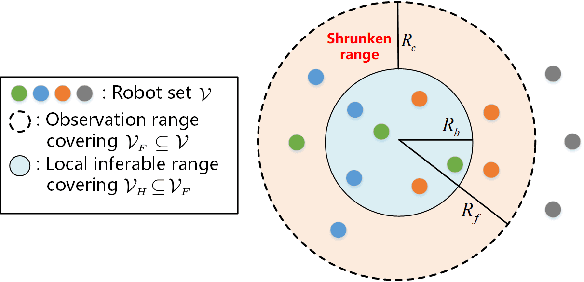
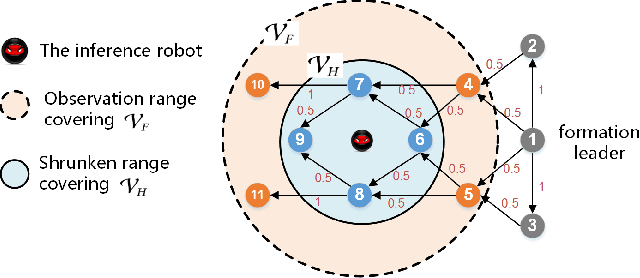
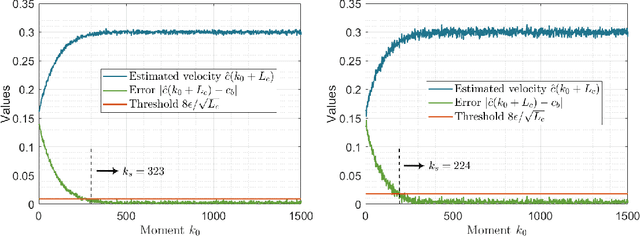
The interaction topology is critical for efficient cooperation of mobile robotic networks (MRNs). We focus on the local topology inference problem of MRNs under formation control, where an inference robot with limited observation range can manoeuvre among the formation robots. This problem faces new challenges brought by the highly coupled influence of unobservable formation robots, inaccessible formation inputs, and unknown interaction range. The novel idea here is to advocate a range-shrink strategy to perfectly avoid the influence of unobservable robots while filtering the input. To that end, we develop consecutive algorithms to determine a feasible constant robot subset from the changing robot set within the observation range, and estimate the formation input and the interaction range. Then, an ordinary least squares based local topology estimator is designed with the previously inferred information. Resorting to the concentration measure, we prove the convergence rate and accuracy of the proposed estimator, taking the estimation errors of previous steps into account. Extensions on nonidentical observation slots and more complicated scenarios are also analyzed. Comprehensive simulation tests and method comparisons corroborate the theoretical findings.
On Topology Inference for Networked Dynamical Systems: Principles and Performances
Jun 02, 2021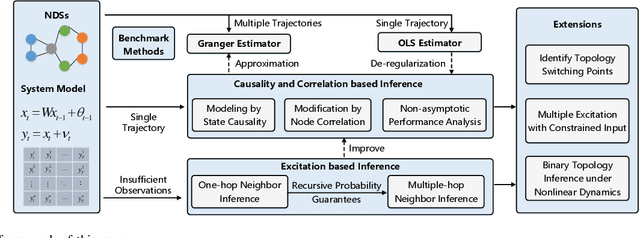
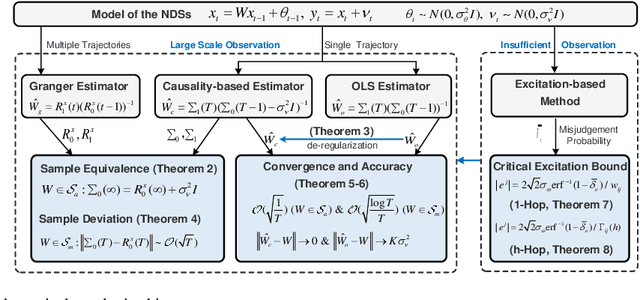
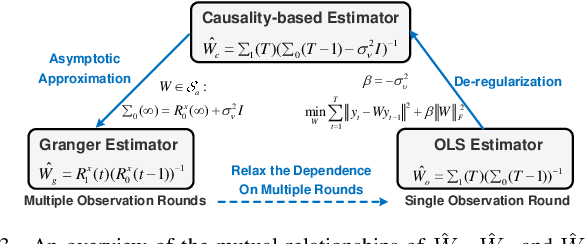
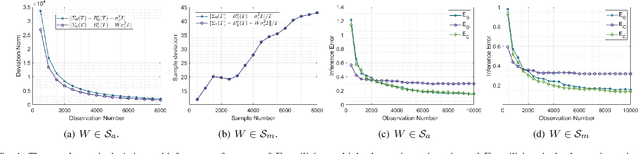
Topology inference for networked dynamical systems (NDSs) plays a crucial role in many areas. Knowledge of the system topology can aid in detecting anomalies, spotting trends, predicting future behavior and so on. Different from the majority of pioneering works, this paper investigates the principles and performances of topology inference from the perspective of node causality and correlation. Specifically, we advocate a comprehensive analysis framework to unveil the mutual relationship, convergence and accuracy of the proposed methods and other benchmark methods, i.e., the Granger and ordinary least square (OLS) estimators. Our method allows for unknown observation noises, both asymptotic and marginal stabilities for NDSs, while encompasses a correlation-based modification design to alleviate performance degradation in small observation scale. To explicitly demonstrate the inference performance of the estimators, we leverage the concentration measure in Gaussian space, and derive the non-asymptotic rates of the inference errors for linear time-invariant (LTI) cases. Considering when the observations are not sufficient to support the estimators, we provide an excitation-based method to infer the one-hop and multi-hop neighbors with probability guarantees. Furthermore, we point out the theoretical results can be extended to switching topologies and nonlinear dynamics cases. Extensive simulations highlight the outperformance of the proposed method.
Learning-based Intelligent Attack against Mobile Robots with Obstacle-avoidance
Oct 14, 2019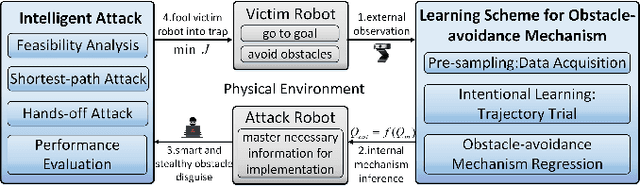
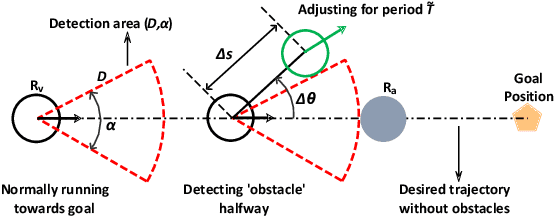
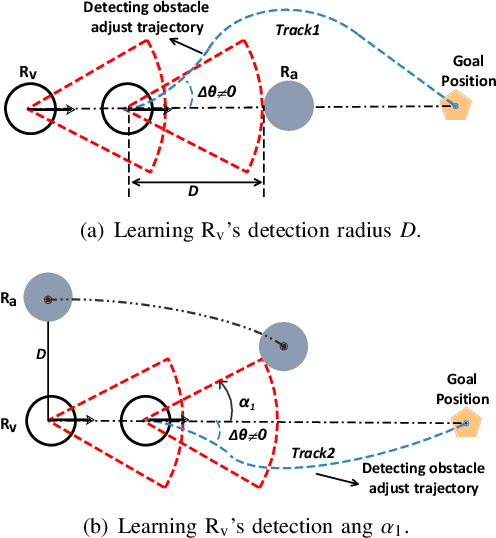
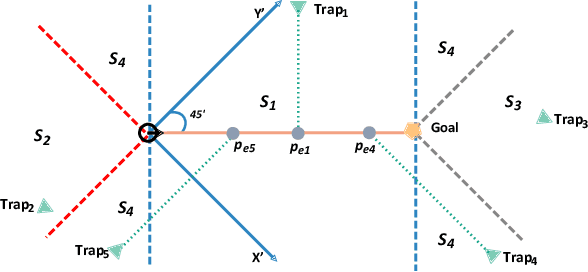
The security issue of mobile robots have attracted considerable attention in recent years. Most existing works focus on detection and countermeasures for some classic attacks from cyberspace. Nevertheless, those work are generally based on some prior assumptions for the attacker (e.g., the system dynamics is known, or internal access is compromised). A few work are delicated to physical attacks, however, there still lacks certain intelligence and advanced control design. In this paper, we propose a physical-based and intelligent attack framework against the obstacle-avoidance of mobile robots. The novelty of our work lies in the following: i) Without any prior information of the system dynamics, the attacker can learn the detection area and goal position of a mobile robot by trial and observation, and the obstacle-avoidance mechanism is learned by support vector regression (SVR) method; ii) Considering different attack requirements, different attack strategies are proposed to implement the attack efficiently; iii) The framework is suitable for holonomic and non-holonomic mobile robots, and the algorithm performance analysis about time complexity and optimality is provided. Furthermore, the condition is obtained to guarantee the success of the attack. Simulations illustrate the effectiveness of the proposed framework.