 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-supervised CNN for Unconstrained 3D Facial Performance Capture from an RGB-D Camera
Paper and Code
Aug 17, 2018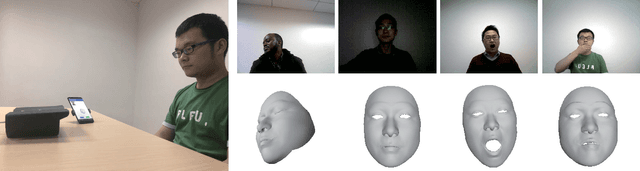
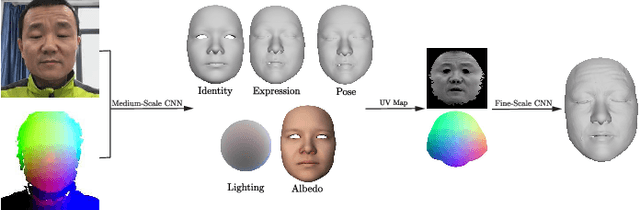
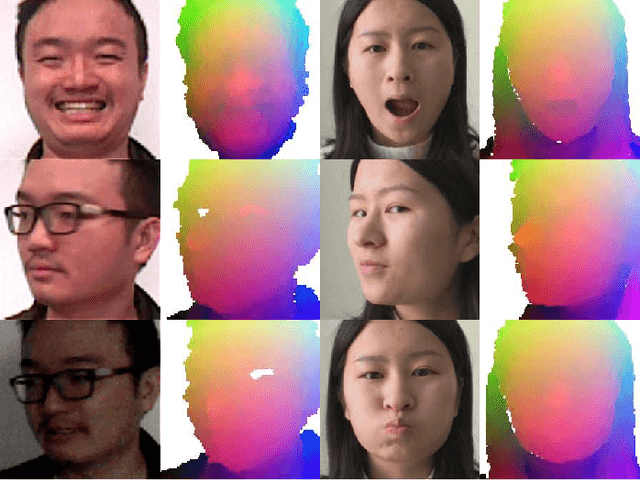
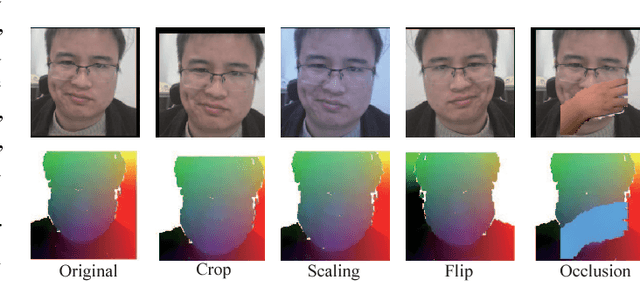
We present a novel method for real-time 3D facial performance capture with consumer-level RGB-D sensors. Our capturing system is targeted at robust and stable 3D face capturing in the wild, in which the RGB-D facial data contain noise, imperfection and occlusion, and often exhibit high variability in motion, pose, expression and lighting conditions, thus posing great challenges. The technical contribution is a self-supervised deep learning framework, which is trained directly from raw RGB-D data. The key novelties include: (1) learning both the core tensor and the parameters for refining our parametric face model; (2) using vertex displacement and UV map for learning surface detail; (3) designing the loss function by incorporating temporal coherence and same identity constraints based on pairs of RGB-D images and utilizing sparse norms, in addition to the conventional terms for photo-consistency, feature similarity, regularization as well as geometry consistency; and (4) augmenting the training data set in new ways. The method is demonstrated in a live setup that runs in real-time on a smartphone and an RGB-D sensor. Extensive experiments show that our method is robust to severe occlusion, fast motion, large rotation, exaggerated facial expressions and diverse lighting.