 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Semantic and Label Perturbation Attack for Pedestrian Attribute Recognition
May 29, 2025Pedestrian Attribute Recognition (PAR) is an indispensable task in human-centered research and has made great progress in recent years with the development of deep neural networks. However, the potential vulnerability and anti-interference ability have still not been fully explored. To bridge this gap, this paper proposes the first adversarial attack and defense framework for pedestrian attribute recognition. Specifically, we exploit both global- and patch-level attacks on the pedestrian images, based on the pre-trained CLIP-based PAR framework. It first divides the input pedestrian image into non-overlapping patches and embeds them into feature embeddings using a projection layer. Meanwhile, the attribute set is expanded into sentences using prompts and embedded into attribute features using a pre-trained CLIP text encoder. A multi-modal Transformer is adopted to fuse the obtained vision and text tokens, and a feed-forward network is utilized for attribute recognition. Based on the aforementioned PAR framework, we adopt the adversarial semantic and label-perturbation to generate the adversarial noise, termed ASL-PAR. We also design a semantic offset defense strategy to suppress the influence of adversarial attacks. Extensive experiments conducted on both digital domains (i.e., PETA, PA100K, MSP60K, RAPv2) and physical domains fully validated the effectiveness of our proposed adversarial attack and defense strategies for the pedestrian attribute recognition. The source code of this paper will be released on https://github.com/Event-AHU/OpenPAR.
AEIOU: A Unified Defense Framework against NSFW Prompts in Text-to-Image Models
Dec 24, 2024



As text-to-image (T2I) models continue to advance and gain widespread adoption, their associated safety issues are becoming increasingly prominent. Malicious users often exploit these models to generate Not-Safe-for-Work (NSFW) images using harmful or adversarial prompts, highlighting the critical need for robust safeguards to ensure the integrity and compliance of model outputs. Current internal safeguards frequently degrade image quality, while external detection methods often suffer from low accuracy and inefficiency. In this paper, we introduce AEIOU, a defense framework that is Adaptable, Efficient, Interpretable, Optimizable, and Unified against NSFW prompts in T2I models. AEIOU extracts NSFW features from the hidden states of the model's text encoder, utilizing the separable nature of these features to detect NSFW prompts. The detection process is efficient, requiring minimal inference time. AEIOU also offers real-time interpretation of results and supports optimization through data augmentation techniques. The framework is versatile, accommodating various T2I architectures. Our extensive experiments show that AEIOU significantly outperforms both commercial and open-source moderation tools, achieving over 95% accuracy across all datasets and improving efficiency by at least tenfold. It effectively counters adaptive attacks and excels in few-shot and multi-label scenarios.
Multilevel Perception Boundary-guided Network for Breast Lesion Segmentation in Ultrasound Images
Oct 23, 2023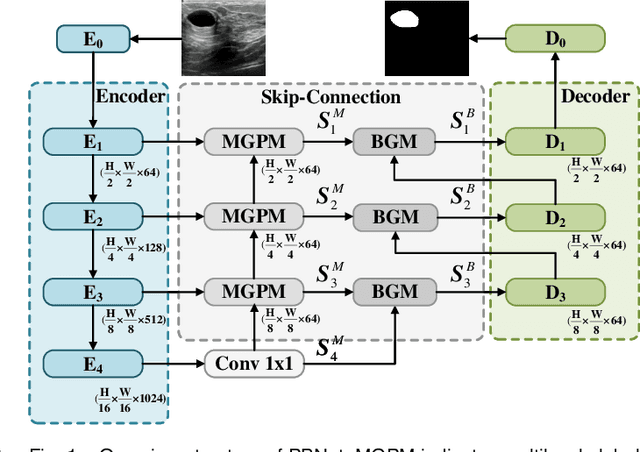
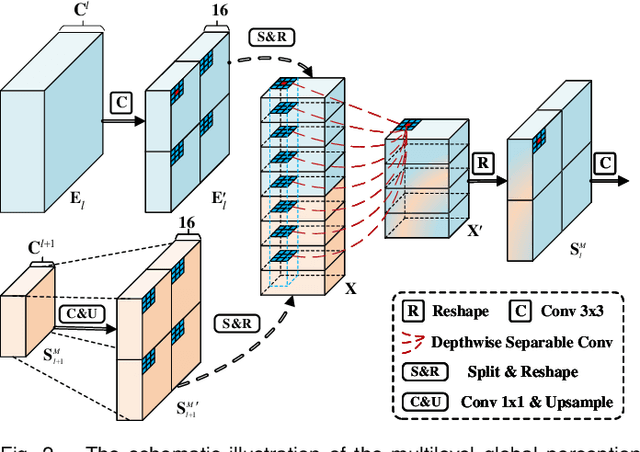
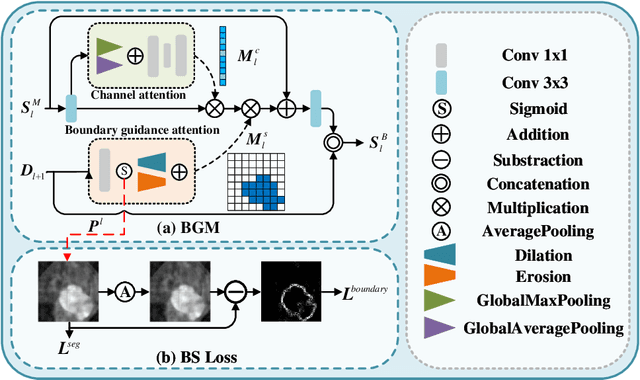
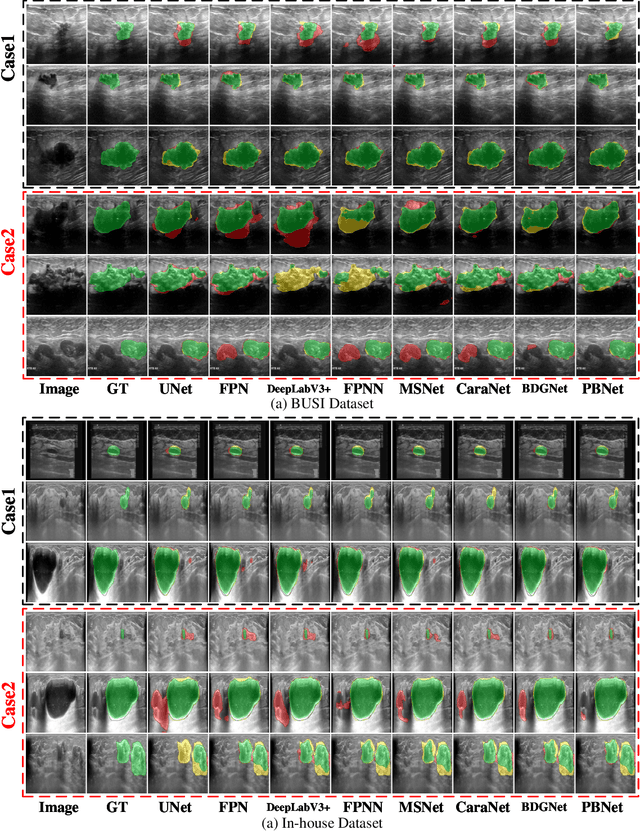
Automatic segmentation of breast tumors from the ultrasound images is essential for the subsequent clinical diagnosis and treatment plan. Although the existing deep learning-based methods have achieved significant progress in automatic segmentation of breast tumor, their performance on tumors with similar intensity to the normal tissues is still not pleasant, especially for the tumor boundaries. To address this issue, we propose a PBNet composed by a multilevel global perception module (MGPM) and a boundary guided module (BGM) to segment breast tumors from ultrasound images. Specifically, in MGPM, the long-range spatial dependence between the voxels in a single level feature maps are modeled, and then the multilevel semantic information is fused to promote the recognition ability of the model for non-enhanced tumors. In BGM, the tumor boundaries are extracted from the high-level semantic maps using the dilation and erosion effects of max pooling, such boundaries are then used to guide the fusion of low and high-level features. Moreover, to improve the segmentation performance for tumor boundaries, a multi-level boundary-enhanced segmentation (BS) loss is proposed. The extensive comparison experiments on both publicly available dataset and in-house dataset demonstrate that the proposed PBNet outperforms the state-of-the-art methods in terms of both qualitative visualization results and quantitative evaluation metrics, with the Dice score, Jaccard coefficient, Specificity and HD95 improved by 0.70%, 1.1%, 0.1% and 2.5% respectively. In addition, the ablation experiments validate that the proposed MGPM is indeed beneficial for distinguishing the non-enhanced tumors and the BGM as well as the BS loss are also helpful for refining the segmentation contours of the tumor.
TextDefense: Adversarial Text Detection based on Word Importance Entropy
Feb 12, 2023



Currently, natural language processing (NLP) models are wildly used in various scenarios. However, NLP models, like all deep models, are vulnerable to adversarially generated text. Numerous works have been working on mitigating the vulnerability from adversarial attacks. Nevertheless, there is no comprehensive defense in existing works where each work targets a specific attack category or suffers from the limitation of computation overhead, irresistible to adaptive attack, etc. In this paper, we exhaustively investigate the adversarial attack algorithms in NLP, and our empirical studies have discovered that the attack algorithms mainly disrupt the importance distribution of words in a text. A well-trained model can distinguish subtle importance distribution differences between clean and adversarial texts. Based on this intuition, we propose TextDefense, a new adversarial example detection framework that utilizes the target model's capability to defend against adversarial attacks while requiring no prior knowledge. TextDefense differs from previous approaches, where it utilizes the target model for detection and thus is attack type agnostic. Our extensive experiments show that TextDefense can be applied to different architectures, datasets, and attack methods and outperforms existing methods. We also discover that the leading factor influencing the performance of TextDefense is the target model's generalizability. By analyzing the property of the target model and the property of the adversarial example, we provide our insights into the adversarial attacks in NLP and the principles of our defense method.
Hijack Vertical Federated Learning Models with Adversarial Embedding
Dec 01, 2022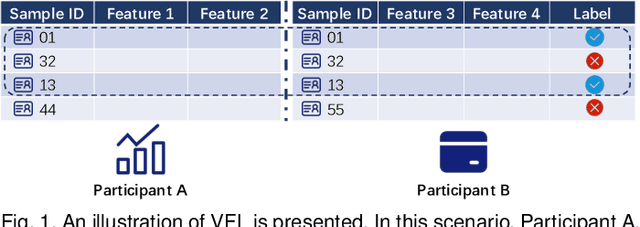
Vertical federated learning (VFL) is an emerging paradigm that enables collaborators to build machine learning models together in a distributed fashion. In general, these parties have a group of users in common but own different features. Existing VFL frameworks use cryptographic techniques to provide data privacy and security guarantees, leading to a line of works studying computing efficiency and fast implementation. However, the security of VFL's model remains underexplored.
Digital Quadruplets for Cyber-Physical-Social Systems based Parallel Driving: From Concept to Applications
Jul 21, 2020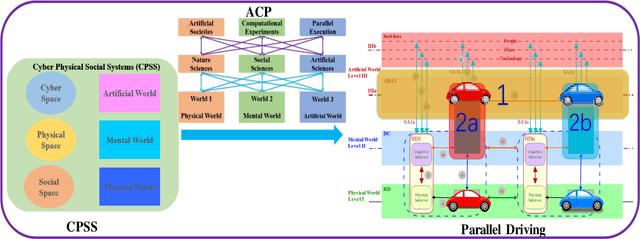

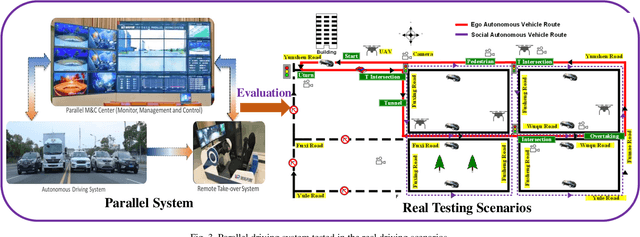
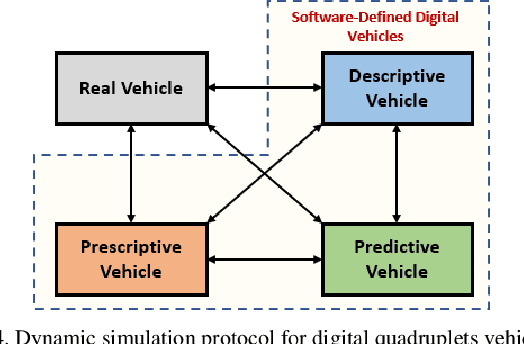
Digital quadruplets aiming to improve road safety, traffic efficiency, and driving cooperation for future connected automated vehicles are proposed with the enlightenment of ACP based parallel driving. The ACP method denotes Artificial societies, Computational experiments, and Parallel execution modules for cyber-physical-social systems. Four agents are designed in the framework of digital quadruplets: descriptive vehicles, predictive vehicles, prescriptive vehicles, and real vehicles. The three virtual vehicles (descriptive, predictive, and prescriptive) dynamically interact with the real one in order to enhance the safety and performance of the real vehicle. The details of the three virtual vehicles in the digital quadruplets are described. Then, the interactions between the virtual and real vehicles are presented. The experimental results of the digital quadruplets demonstrate the effectiveness of the proposed framework.