 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Evolutionary Game-Theoretic Merging Decision-Making Considering Social Acceptance for Autonomous Driving
Aug 09, 2025Highway on-ramp merging is of great challenge for autonomous vehicles (AVs), since they have to proactively interact with surrounding vehicles to enter the main road safely within limited time. However, existing decision-making algorithms fail to adequately address dynamic complexities and social acceptance of AVs, leading to suboptimal or unsafe merging decisions. To address this, we propose an evolutionary game-theoretic (EGT) merging decision-making framework, grounded in the bounded rationality of human drivers, which dynamically balances the benefits of both AVs and main-road vehicles (MVs). We formulate the cut-in decision-making process as an EGT problem with a multi-objective payoff function that reflects human-like driving preferences. By solving the replicator dynamic equation for the evolutionarily stable strategy (ESS), the optimal cut-in timing is derived, balancing efficiency, comfort, and safety for both AVs and MVs. A real-time driving style estimation algorithm is proposed to adjust the game payoff function online by observing the immediate reactions of MVs. Empirical results demonstrate that we improve the efficiency, comfort and safety of both AVs and MVs compared with existing game-theoretic and traditional planning approaches across multi-object metrics.
Digital Quadruplets for Cyber-Physical-Social Systems based Parallel Driving: From Concept to Applications
Jul 21, 2020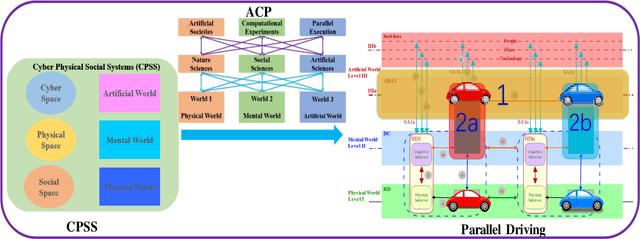

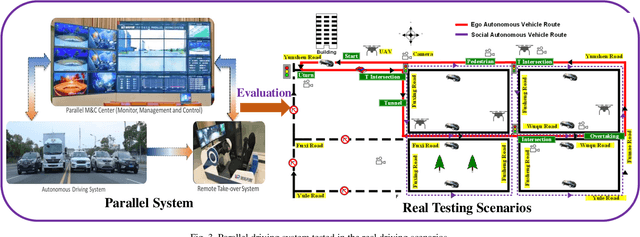
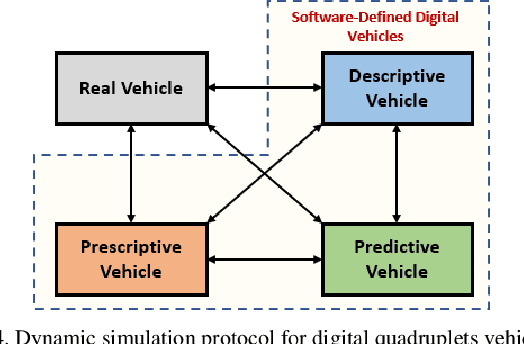
Digital quadruplets aiming to improve road safety, traffic efficiency, and driving cooperation for future connected automated vehicles are proposed with the enlightenment of ACP based parallel driving. The ACP method denotes Artificial societies, Computational experiments, and Parallel execution modules for cyber-physical-social systems. Four agents are designed in the framework of digital quadruplets: descriptive vehicles, predictive vehicles, prescriptive vehicles, and real vehicles. The three virtual vehicles (descriptive, predictive, and prescriptive) dynamically interact with the real one in order to enhance the safety and performance of the real vehicle. The details of the three virtual vehicles in the digital quadruplets are described. Then, the interactions between the virtual and real vehicles are presented. The experimental results of the digital quadruplets demonstrate the effectiveness of the proposed framework.