 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUV-M3TL: A Unified and Versatile Multimodal Multi-Task Learning Framework for Assistive Driving Perception
Feb 02, 2026Advanced Driver Assistance Systems (ADAS) need to understand human driver behavior while perceiving their navigation context, but jointly learning these heterogeneous tasks would cause inter-task negative transfer and impair system performance. Here, we propose a Unified and Versatile Multimodal Multi-Task Learning (UV-M3TL) framework to simultaneously recognize driver behavior, driver emotion, vehicle behavior, and traffic context, while mitigating inter-task negative transfer. Our framework incorporates two core components: dual-branch spatial channel multimodal embedding (DB-SCME) and adaptive feature-decoupled multi-task loss (AFD-Loss). DB-SCME enhances cross-task knowledge transfer while mitigating task conflicts by employing a dual-branch structure to explicitly model salient task-shared and task-specific features. AFD-Loss improves the stability of joint optimization while guiding the model to learn diverse multi-task representations by introducing an adaptive weighting mechanism based on learning dynamics and feature decoupling constraints. We evaluate our method on the AIDE dataset, and the experimental results demonstrate that UV-M3TL achieves state-of-the-art performance across all four tasks. To further prove the versatility, we evaluate UV-M3TL on additional public multi-task perception benchmarks (BDD100K, CityScapes, NYUD-v2, and PASCAL-Context), where it consistently delivers strong performance across diverse task combinations, attaining state-of-the-art results on most tasks.
The Effects of Communication Delay on Human Performance and Neurocognitive Responses in Mobile Robot Teleoperation
Aug 25, 2025Communication delays in mobile robot teleoperation adversely affect human-machine collaboration. Understanding delay effects on human operational performance and neurocognition is essential for resolving this issue. However, no previous research has explored this. To fill this gap, we conduct a human-in-the-loop experiment involving 10 participants, integrating electroencephalography (EEG) and robot behavior data under varying delays (0-500 ms in 100 ms increments) to systematically investigate these effects. Behavior analysis reveals significant performance degradation at 200-300 ms delays, affecting both task efficiency and accuracy. EEG analysis discovers features with significant delay dependence: frontal $\theta/\beta$-band and parietal $\alpha$-band power. We also identify a threshold window (100-200 ms) for early perception of delay in humans, during which these EEG features first exhibit significant differences. When delay exceeds 400 ms, all features plateau, indicating saturation of cognitive resource allocation at physiological limits. These findings provide the first evidence of perceptual and cognitive delay thresholds during teleoperation tasks in humans, offering critical neurocognitive insights for the design of delay compensation strategies.
An Evolutionary Game-Theoretic Merging Decision-Making Considering Social Acceptance for Autonomous Driving
Aug 09, 2025Highway on-ramp merging is of great challenge for autonomous vehicles (AVs), since they have to proactively interact with surrounding vehicles to enter the main road safely within limited time. However, existing decision-making algorithms fail to adequately address dynamic complexities and social acceptance of AVs, leading to suboptimal or unsafe merging decisions. To address this, we propose an evolutionary game-theoretic (EGT) merging decision-making framework, grounded in the bounded rationality of human drivers, which dynamically balances the benefits of both AVs and main-road vehicles (MVs). We formulate the cut-in decision-making process as an EGT problem with a multi-objective payoff function that reflects human-like driving preferences. By solving the replicator dynamic equation for the evolutionarily stable strategy (ESS), the optimal cut-in timing is derived, balancing efficiency, comfort, and safety for both AVs and MVs. A real-time driving style estimation algorithm is proposed to adjust the game payoff function online by observing the immediate reactions of MVs. Empirical results demonstrate that we improve the efficiency, comfort and safety of both AVs and MVs compared with existing game-theoretic and traditional planning approaches across multi-object metrics.
100 Drivers, 2200 km: A Natural Dataset of Driving Style toward Human-centered Intelligent Driving Systems
Jun 12, 2024



Effective driving style analysis is critical to developing human-centered intelligent driving systems that consider drivers' preferences. However, the approaches and conclusions of most related studies are diverse and inconsistent because no unified datasets tagged with driving styles exist as a reliable benchmark. The absence of explicit driving style labels makes verifying different approaches and algorithms difficult. This paper provides a new benchmark by constructing a natural dataset of Driving Style (100-DrivingStyle) tagged with the subjective evaluation of 100 drivers' driving styles. In this dataset, the subjective quantification of each driver's driving style is from themselves and an expert according to the Likert-scale questionnaire. The testing routes are selected to cover various driving scenarios, including highways, urban, highway ramps, and signalized traffic. The collected driving data consists of lateral and longitudinal manipulation information, including steering angle, steering speed, lateral acceleration, throttle position, throttle rate, brake pressure, etc. This dataset is the first to provide detailed manipulation data with driving-style tags, and we demonstrate its benchmark function using six classifiers. The 100-DrivingStyle dataset is available via https://github.com/chaopengzhang/100-DrivingStyle-Dataset
Shareable Driving Style Learning and Analysis with a Hierarchical Latent Model
Oct 24, 2023Driving style is usually used to characterize driving behavior for a driver or a group of drivers. However, it remains unclear how one individual's driving style shares certain common grounds with other drivers. Our insight is that driving behavior is a sequence of responses to the weighted mixture of latent driving styles that are shareable within and between individuals. To this end, this paper develops a hierarchical latent model to learn the relationship between driving behavior and driving styles. We first propose a fragment-based approach to represent complex sequential driving behavior, allowing for sufficiently representing driving behavior in a low-dimension feature space. Then, we provide an analytical formulation for the interaction of driving behavior and shareable driving style with a hierarchical latent model by introducing the mechanism of Dirichlet allocation. Our developed model is finally validated and verified with 100 drivers in naturalistic driving settings with urban and highways. Experimental results reveal that individuals share driving styles within and between them. We also analyzed the influence of personalities (e.g., age, gender, and driving experience) on driving styles and found that a naturally aggressive driver would not always keep driving aggressively (i.e., could behave calmly sometimes) but with a higher proportion of aggressiveness than other types of drivers.
Spatiotemporal Learning of Multivehicle Interaction Patterns in Lane-Change Scenarios
Mar 02, 2020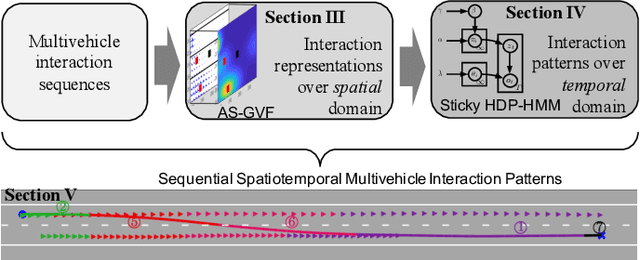
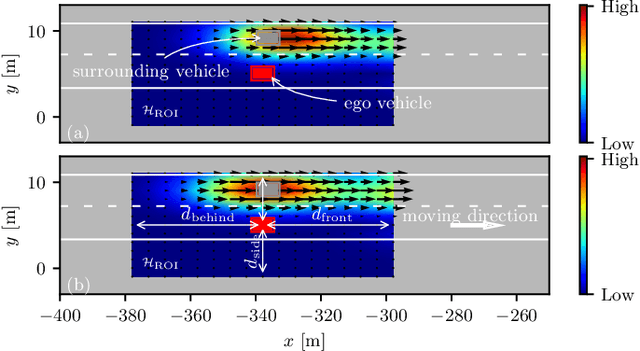


Interpretation of common-yet-challenging interaction scenarios can benefit well-founded decisions for autonomous vehicles. Previous research achieved this using their prior knowledge of specific scenarios with predefined models, which limits their adaptive capabilities. This paper describes a Bayesian nonparametric approach that leverages continuous (i.e., Gaussian processes) and discrete (i.e., Dirichlet processes) stochastic processes to reveal underlying interaction patterns of the ego vehicle with other nearby vehicles. Our model relaxes dependency on the number of surrounding vehicles by developing an acceleration-sensitive velocity field based on Gaussian processes. The experiment results demonstrate that the velocity field can represent the spatial interactions between the ego vehicle and its surroundings. Then, a discrete Bayesian nonparametric model, integrating Dirichlet processes and hidden Markov models, is developed to learn the interaction patterns over the temporal space by segmenting and clustering the sequential interaction data into interpretable granular patterns automatically. We then evaluate our approach in the highway lane-change scenarios using the highD dataset, which was collected from real-world settings. Results demonstrate that our proposed Bayesian nonparametric approach provides an insight into the complicated lane-change interactions of the ego vehicle with multiple surrounding traffic participants based on the interpretable interaction patterns and their transition properties in temporal relationships. Our proposed approach sheds light on efficiently analyzing other kinds of multi-agent interactions, such as vehicle-pedestrian interactions.
Learning and Inferring a Driver's Braking Action in Car-Following Scenarios
Jan 11, 2018



Accurately predicting and inferring a driver's decision to brake is critical for designing warning systems and avoiding collisions. In this paper we focus on predicting a driver's intent to brake in car-following scenarios from a perception-decision-action perspective according to his/her driving history. A learning-based inference method, using onboard data from CAN-Bus, radar and cameras as explanatory variables, is introduced to infer drivers' braking decisions by combining a Gaussian mixture model (GMM) with a hidden Markov model (HMM). The GMM is used to model stochastic relationships among variables, while the HMM is applied to infer drivers' braking actions based on the GMM. Real-case driving data from 49 drivers (more than three years' driving data per driver on average) have been collected from the University of Michigan Safety Pilot Model Deployment database. We compare the GMM-HMM method to a support vector machine (SVM) method and an SVM-Bayesian filtering method. The experimental results are evaluated by employing three performance metrics: accuracy, sensitivity, specificity. The comparison results show that the GMM-HMM obtains the best performance, with an accuracy of 90%, sensitivity of 84%, and specificity of 97%. Thus, we believe that this method has great potential for real-world active safety systems.
Driving Style Analysis Using Primitive Driving Patterns With Bayesian Nonparametric Approaches
Aug 16, 2017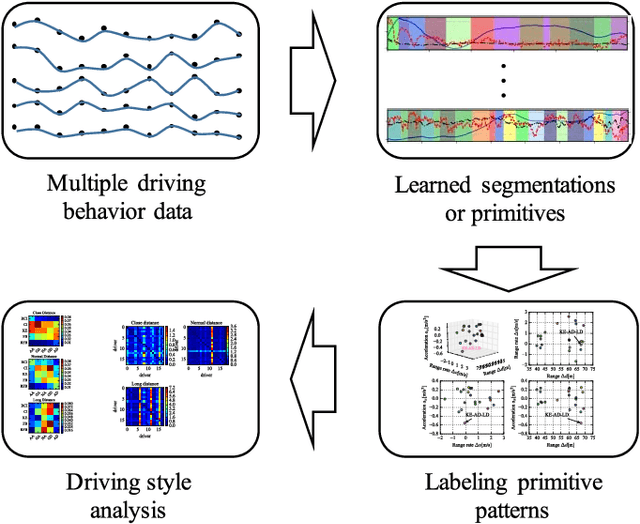
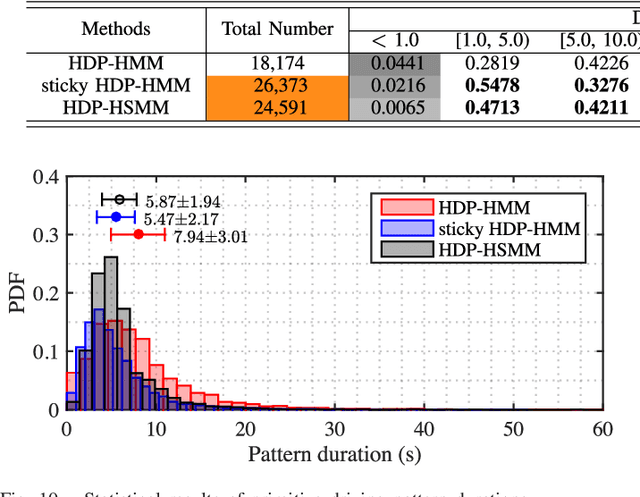
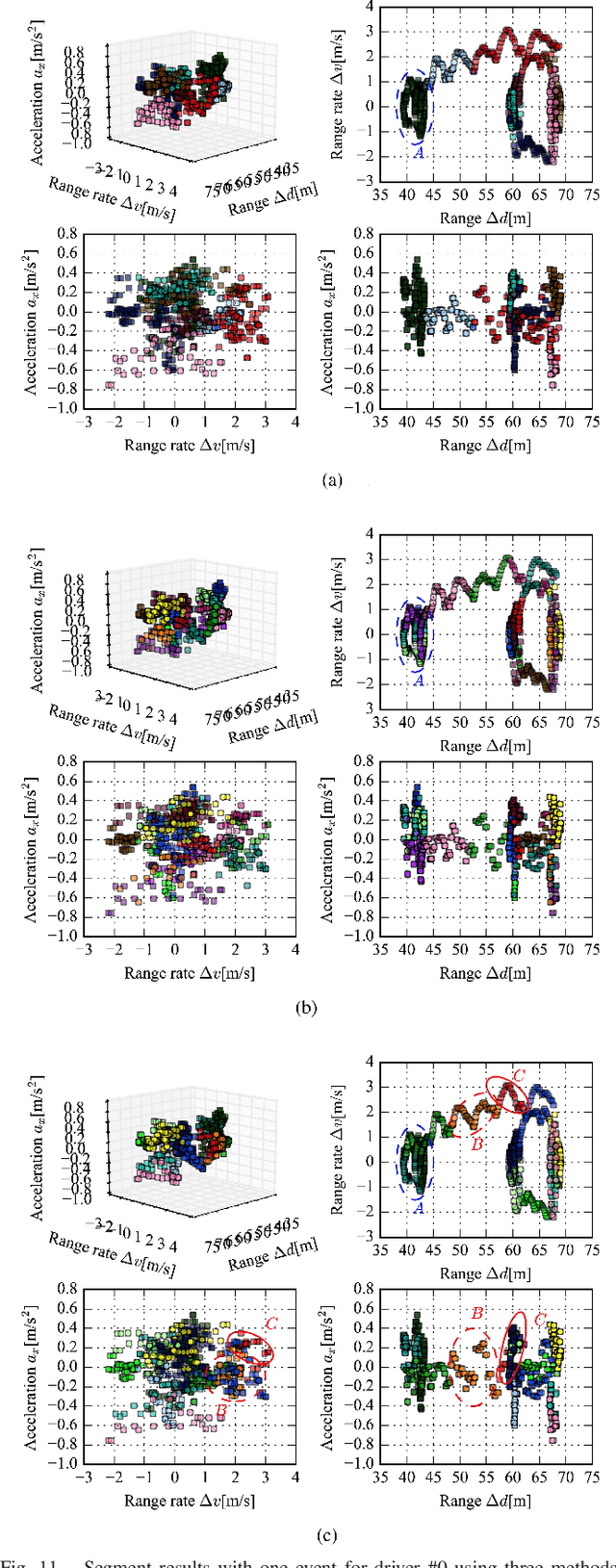
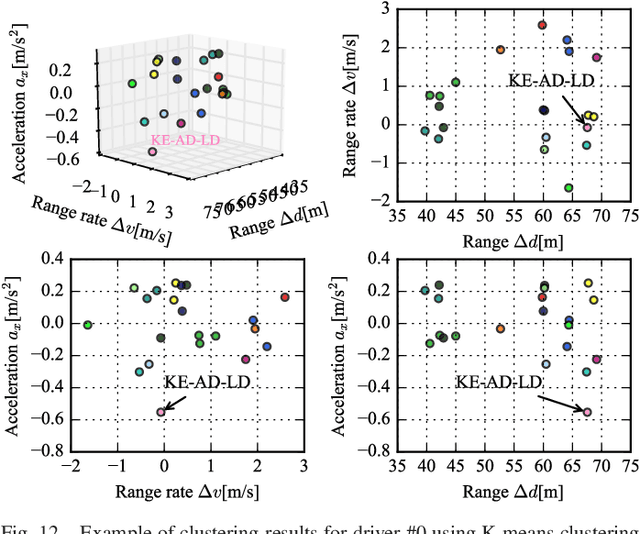
Analysis and recognition of driving styles are profoundly important to intelligent transportation and vehicle calibration. This paper presents a novel driving style analysis framework using the primitive driving patterns learned from naturalistic driving data. In order to achieve this, first, a Bayesian nonparametric learning method based on a hidden semi-Markov model (HSMM) is introduced to extract primitive driving patterns from time series driving data without prior knowledge of the number of these patterns. In the Bayesian nonparametric approach, we utilize a hierarchical Dirichlet process (HDP) instead of learning the unknown number of smooth dynamical modes of HSMM, thus generating the primitive driving patterns. Each primitive pattern is clustered and then labeled using behavioral semantics according to drivers' physical and psychological perception thresholds. For each driver, 75 primitive driving patterns in car-following scenarios are learned and semantically labeled. In order to show the HDP-HSMM's utility to learn primitive driving patterns, other two Bayesian nonparametric approaches, HDP-HMM and sticky HDP-HMM, are compared. The naturalistic driving data of 18 drivers were collected from the University of Michigan Safety Pilot Model Deployment (SPDM) database. The individual driving styles are discussed according to distribution characteristics of the learned primitive driving patterns and also the difference in driving styles among drivers are evaluated using the Kullback-Leibler divergence. The experiment results demonstrate that the proposed primitive pattern-based method can allow one to semantically understand driver behaviors and driving styles.
A Learning-Based Approach for Lane Departure Warning Systems with a Personalized Driver Model
Feb 04, 2017


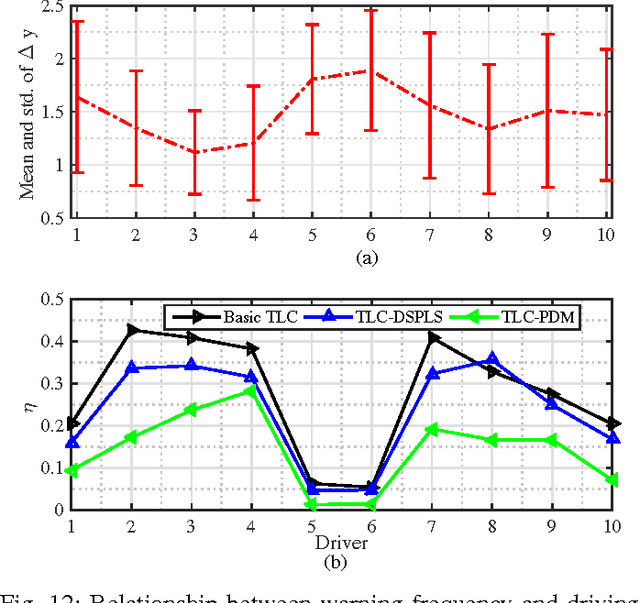
Misunderstanding of driver correction behaviors (DCB) is the primary reason for false warnings of lane-departure-prediction systems. We propose a learning-based approach to predicting unintended lane-departure behaviors (LDB) and the chance for drivers to bring the vehicle back to the lane. First, in this approach, a personalized driver model for lane-departure and lane-keeping behavior is established by combining the Gaussian mixture model and the hidden Markov model. Second, based on this model, we develop an online model-based prediction algorithm to predict the forthcoming vehicle trajectory and judge whether the driver will demonstrate an LDB or a DCB. We also develop a warning strategy based on the model-based prediction algorithm that allows the lane-departure warning system to be acceptable for drivers according to the predicted trajectory. In addition, the naturalistic driving data of 10 drivers is collected through the University of Michigan Safety Pilot Model Deployment program to train the personalized driver model and validate this approach. We compare the proposed method with a basic time-to-lane-crossing (TLC) method and a TLC-directional sequence of piecewise lateral slopes (TLC-DSPLS) method. The results show that the proposed approach can reduce the false-warning rate to 3.07\%.
Statistical Pattern Recognition for Driving Styles Based on Bayesian Probability and Kernel Density Estimation
Jun 03, 2016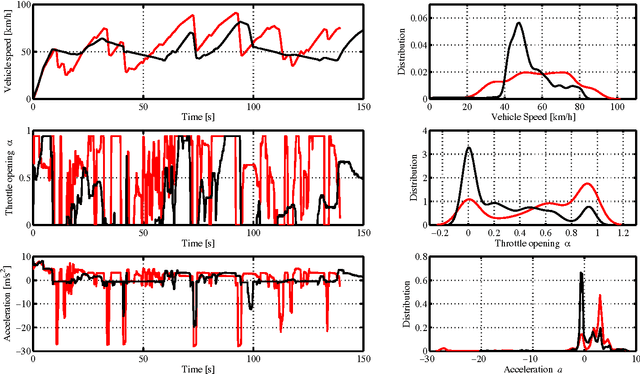
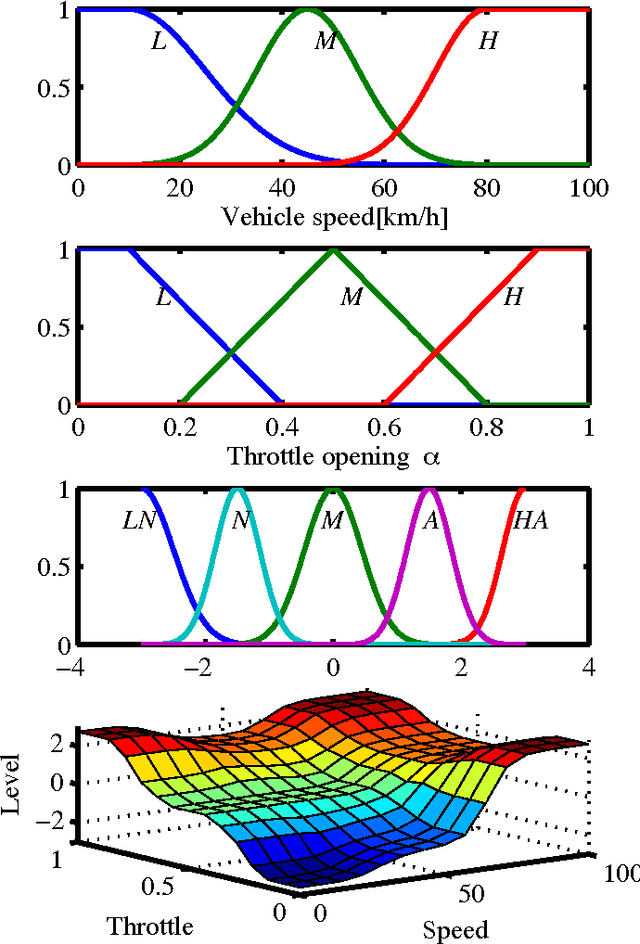
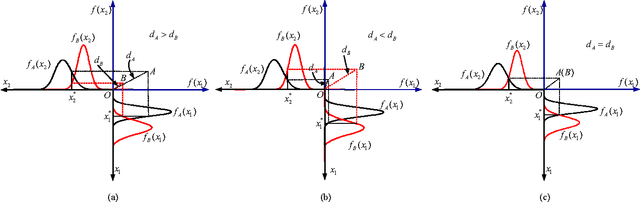

Driving styles have a great influence on vehicle fuel economy, active safety, and drivability. To recognize driving styles of path-tracking behaviors for different divers, a statistical pattern-recognition method is developed to deal with the uncertainty of driving styles or characteristics based on probability density estimation. First, to describe driver path-tracking styles, vehicle speed and throttle opening are selected as the discriminative parameters, and a conditional kernel density function of vehicle speed and throttle opening is built, respectively, to describe the uncertainty and probability of two representative driving styles, e.g., aggressive and normal. Meanwhile, a posterior probability of each element in feature vector is obtained using full Bayesian theory. Second, a Euclidean distance method is involved to decide to which class the driver should be subject instead of calculating the complex covariance between every two elements of feature vectors. By comparing the Euclidean distance between every elements in feature vector, driving styles are classified into seven levels ranging from low normal to high aggressive. Subsequently, to show benefits of the proposed pattern-recognition method, a cross-validated method is used, compared with a fuzzy logic-based pattern-recognition method. The experiment results show that the proposed statistical pattern-recognition method for driving styles based on kernel density estimation is more efficient and stable than the fuzzy logic-based method.
* 10 pages, 9 figures. Submitted to International Journal of Automotive Technology