 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhotoAgent: A Robotic Photographer with Spatial and Aesthetic Understanding
Mar 24, 2026Embodied agents for creative tasks like photography must bridge the semantic gap between high-level language commands and geometric control. We introduce PhotoAgent, an agent that achieves this by integrating Large Multimodal Models (LMMs) reasoning with a novel control paradigm. PhotoAgent first translates subjective aesthetic goals into solvable geometric constraints via LMM-driven, chain-of-thought (CoT) reasoning, allowing an analytical solver to compute a high-quality initial viewpoint. This initial pose is then iteratively refined through visual reflection within a photorealistic internal world model built with 3D Gaussian Splatting (3DGS). This ``mental simulation'' replaces costly and slow physical trial-and-error, enabling rapid convergence to aesthetically superior results. Evaluations confirm that PhotoAgent excels in spatial reasoning and achieves superior final image quality.
CausalNav: A Long-term Embodied Navigation System for Autonomous Mobile Robots in Dynamic Outdoor Scenarios
Jan 05, 2026Autonomous language-guided navigation in large-scale outdoor environments remains a key challenge in mobile robotics, due to difficulties in semantic reasoning, dynamic conditions, and long-term stability. We propose CausalNav, the first scene graph-based semantic navigation framework tailored for dynamic outdoor environments. We construct a multi-level semantic scene graph using LLMs, referred to as the Embodied Graph, that hierarchically integrates coarse-grained map data with fine-grained object entities. The constructed graph serves as a retrievable knowledge base for Retrieval-Augmented Generation (RAG), enabling semantic navigation and long-range planning under open-vocabulary queries. By fusing real-time perception with offline map data, the Embodied Graph supports robust navigation across varying spatial granularities in dynamic outdoor environments. Dynamic objects are explicitly handled in both the scene graph construction and hierarchical planning modules. The Embodied Graph is continuously updated within a temporal window to reflect environmental changes and support real-time semantic navigation. Extensive experiments in both simulation and real-world settings demonstrate superior robustness and efficiency.
An Evolutionary Game-Theoretic Merging Decision-Making Considering Social Acceptance for Autonomous Driving
Aug 09, 2025Highway on-ramp merging is of great challenge for autonomous vehicles (AVs), since they have to proactively interact with surrounding vehicles to enter the main road safely within limited time. However, existing decision-making algorithms fail to adequately address dynamic complexities and social acceptance of AVs, leading to suboptimal or unsafe merging decisions. To address this, we propose an evolutionary game-theoretic (EGT) merging decision-making framework, grounded in the bounded rationality of human drivers, which dynamically balances the benefits of both AVs and main-road vehicles (MVs). We formulate the cut-in decision-making process as an EGT problem with a multi-objective payoff function that reflects human-like driving preferences. By solving the replicator dynamic equation for the evolutionarily stable strategy (ESS), the optimal cut-in timing is derived, balancing efficiency, comfort, and safety for both AVs and MVs. A real-time driving style estimation algorithm is proposed to adjust the game payoff function online by observing the immediate reactions of MVs. Empirical results demonstrate that we improve the efficiency, comfort and safety of both AVs and MVs compared with existing game-theoretic and traditional planning approaches across multi-object metrics.
VTire: A Bimodal Visuotactile Tire with High-Resolution Sensing Capability
Apr 27, 2025Developing smart tires with high sensing capability is significant for improving the moving stability and environmental adaptability of wheeled robots and vehicles. However, due to the classical manufacturing design, it is always challenging for tires to infer external information precisely. To this end, this paper introduces a bimodal sensing tire, which can simultaneously capture tactile and visual data. By leveraging the emerging visuotactile techniques, the proposed smart tire can realize various functions, including terrain recognition, ground crack detection, load sensing, and tire damage detection. Besides, we optimize the material and structure of the tire to ensure its outstanding elasticity, toughness, hardness, and transparency. In terms of algorithms, a transformer-based multimodal classification algorithm, a load detection method based on finite element analysis, and a contact segmentation algorithm have been developed. Furthermore, we construct an intelligent mobile platform to validate the system's effectiveness and develop visual and tactile datasets in complex terrains. The experimental results show that our multimodal terrain sensing algorithm can achieve a classification accuracy of 99.2\%, a tire damage detection accuracy of 97\%, a 98\% success rate in object search, and the ability to withstand tire loading weights exceeding 35 kg. In addition, we open-source our algorithms, hardware, and datasets at https://sites.google.com/view/vtire.
D3-ARM: High-Dynamic, Dexterous and Fully Decoupled Cable-driven Robotic Arm
Feb 18, 2025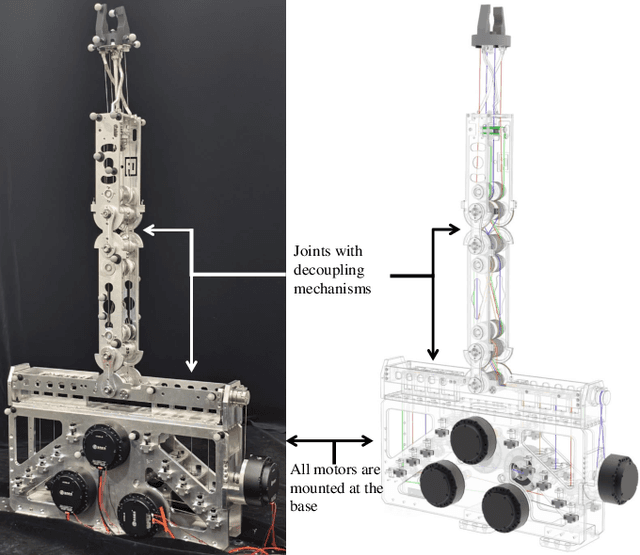



Cable transmission enables motors of robotic arm to operate lightweight and low-inertia joints remotely in various environments, but it also creates issues with motion coupling and cable routing that can reduce arm's control precision and performance. In this paper, we present a novel motion decoupling mechanism with low-friction to align the cables and efficiently transmit the motor's power. By arranging these mechanisms at the joints, we fabricate a fully decoupled and lightweight cable-driven robotic arm called D3-Arm with all the electrical components be placed at the base. Its 776 mm length moving part boasts six degrees of freedom (DOF) and only 1.6 kg weights. To address the issue of cable slack, a cable-pretension mechanism is integrated to enhance the stability of long-distance cable transmission. Through a series of comprehensive tests, D3-Arm demonstrated 1.29 mm average positioning error and 2.0 kg payload capacity, proving the practicality of the proposed decoupling mechanisms in cable-driven robotic arm.
Hybrid Trajectory Optimization for Autonomous Terrain Traversal of Articulated Tracked Robots
Jun 05, 2023


Autonomous terrain traversal of articulated tracked robots can reduce operator cognitive load to enhance task efficiency and facilitate extensive deployment. We present a novel hybrid trajectory optimization method aimed at generating smooth, stable, and efficient traversal motions. To achieve this, we develop a planar robot-terrain interaction model and partition the robot's motion into hybrid modes of driving and traversing. By using a generalized coordinate description, the configuration space dimension is reduced, which provides real-time planning capability. The hybrid trajectory optimization is transcribed into a nonlinear programming problem and solved in a receding-horizon planning fashion. Mode switching is facilitated by associating optimized motion durations with a predefined traversal sequence. A multi-objective cost function is formulated to further improve the traversal performance. Additionally, map sampling, terrain simplification, and tracking controller modules are integrated into the autonomous terrain traversal system. Our approach is validated in simulation and real-world experiments with the Searcher robotic platform, effectively achieving smooth and stable motion with high time and energy efficiency compared to expert operator control.
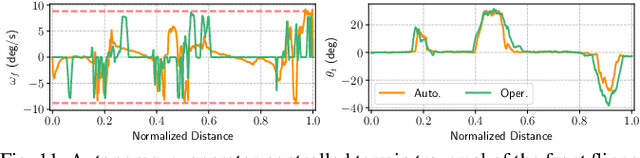
Quadruped Guidance Robot for the Visually Impaired: A Comfort-Based Approach
Mar 08, 2022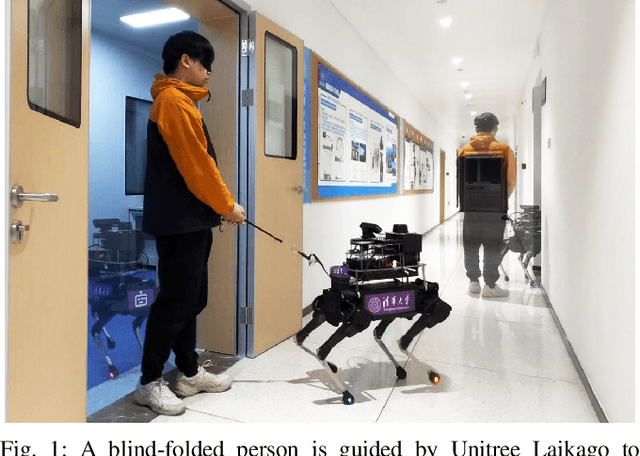

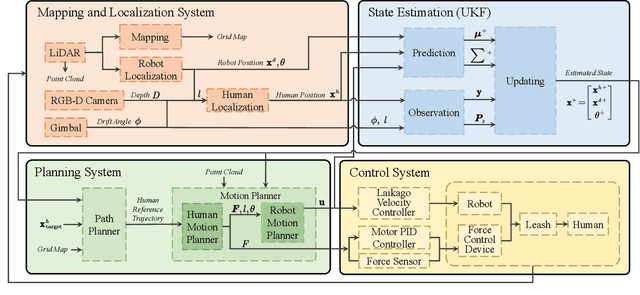

A quadrupedal guidance robot that can guide people and avoid various obstacles, could potentially be owned by more visually impaired people at a fairly low cost. In this paper, we propose a novel guidance robot system with a comfort-based concept. We design a leash containing an elastic rope and a thin string, and use a motor to adjust the length of the string to ensure comfort. We use the force-based human motion model to plan the forces experienced by the human. Afterward, the direction and magnitude of the force are controlled by the motion of the robot, and the rotation of the motor, respectively. This allows humans to be guided safely and more comfortably to the target position in complex environments. The system has been deployed on Unitree Laikago quadrupedal platform and validated in real-world scenarios.
Joint Prediction and Time Estimation of COVID-19 Developing Severe Symptoms using Chest CT Scan
May 07, 2020
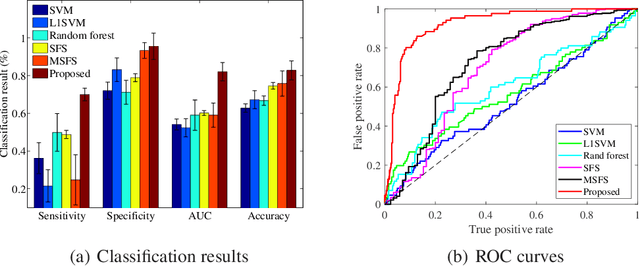
With the rapidly worldwide spread of Coronavirus disease (COVID-19), it is of great importance to conduct early diagnosis of COVID-19 and predict the time that patients might convert to the severe stage, for designing effective treatment plan and reducing the clinicians' workloads. In this study, we propose a joint classification and regression method to determine whether the patient would develop severe symptoms in the later time, and if yes, predict the possible conversion time that the patient would spend to convert to the severe stage. To do this, the proposed method takes into account 1) the weight for each sample to reduce the outliers' influence and explore the problem of imbalance classification, and 2) the weight for each feature via a sparsity regularization term to remove the redundant features of high-dimensional data and learn the shared information across the classification task and the regression task. To our knowledge, this study is the first work to predict the disease progression and the conversion time, which could help clinicians to deal with the potential severe cases in time or even save the patients' lives. Experimental analysis was conducted on a real data set from two hospitals with 422 chest computed tomography (CT) scans, where 52 cases were converted to severe on average 5.64 days and 34 cases were severe at admission. Results show that our method achieves the best classification (e.g., 85.91% of accuracy) and regression (e.g., 0.462 of the correlation coefficient) performance, compared to all comparison methods. Moreover, our proposed method yields 76.97% of accuracy for predicting the severe cases, 0.524 of the correlation coefficient, and 0.55 days difference for the converted time.