 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadruped Guidance Robot for the Visually Impaired: A Comfort-Based Approach
Mar 08, 2022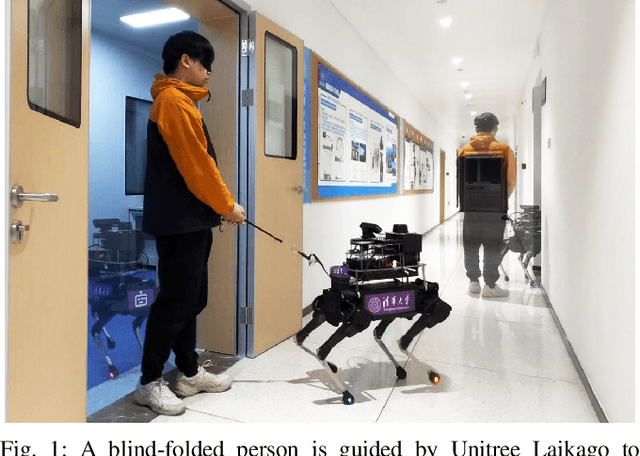

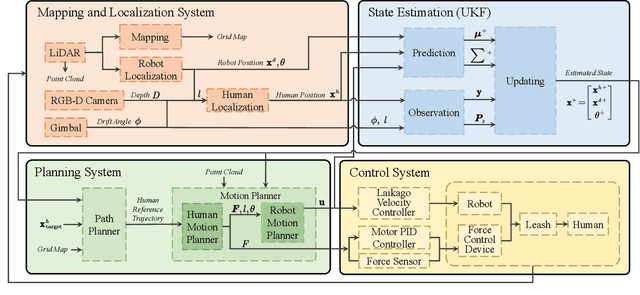

A quadrupedal guidance robot that can guide people and avoid various obstacles, could potentially be owned by more visually impaired people at a fairly low cost. In this paper, we propose a novel guidance robot system with a comfort-based concept. We design a leash containing an elastic rope and a thin string, and use a motor to adjust the length of the string to ensure comfort. We use the force-based human motion model to plan the forces experienced by the human. Afterward, the direction and magnitude of the force are controlled by the motion of the robot, and the rotation of the motor, respectively. This allows humans to be guided safely and more comfortably to the target position in complex environments. The system has been deployed on Unitree Laikago quadrupedal platform and validated in real-world scenarios.