 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAXIOM: Benchmarking LLM-as-a-Judge for Code via Rule-Based Perturbation and Multisource Quality Calibration
Dec 23, 2025Large language models (LLMs) have been increasingly deployed in real-world software engineering, fostering the development of code evaluation metrics to study the quality of LLM-generated code. Conventional rule-based metrics merely score programs based on their surface-level similarities with reference programs instead of analyzing functionality and code quality in depth. To address this limitation, researchers have developed LLM-as-a-judge metrics, prompting LLMs to evaluate and score code, and curated various code evaluation benchmarks to validate their effectiveness. However, these benchmarks suffer from critical limitations, hindering reliable assessments of evaluation capability: Some feature coarse-grained binary labels, which reduce rich code behavior to a single bit of information, obscuring subtle errors. Others propose fine-grained but subjective, vaguely-defined evaluation criteria, introducing unreliability in manually-annotated scores, which is the ground-truth they rely on. Furthermore, they often use uncontrolled data synthesis methods, leading to unbalanced score distributions that poorly represent real-world code generation scenarios. To curate a diverse benchmark with programs of well-balanced distributions across various quality levels and streamline the manual annotation procedure, we propose AXIOM, a novel perturbation-based framework for synthesizing code evaluation benchmarks at scale. It reframes program scores as the refinement effort needed for deployment, consisting of two stages: (1) Rule-guided perturbation, which prompts LLMs to apply sequences of predefined perturbation rules to existing high-quality programs to modify their functionality and code quality, enabling us to precisely control each program's target score to achieve balanced score distributions. (2) Multisource quality calibration, which first selects a subset of...
Benchmarking LLMs for Fine-Grained Code Review with Enriched Context in Practice
Nov 10, 2025



Code review is a cornerstone of software quality assurance, and recent advances in Large Language Models (LLMs) have shown promise in automating this process. However, existing benchmarks for LLM-based code review face three major limitations. (1) Lack of semantic context: most benchmarks provide only code diffs without textual information such as issue descriptions, which are crucial for understanding developer intent. (2) Data quality issues: without rigorous validation, many samples are noisy-e.g., reviews on outdated or irrelevant code-reducing evaluation reliability. (3) Coarse granularity: most benchmarks operate at the file or commit level, overlooking the fine-grained, line-level reasoning essential for precise review. We introduce ContextCRBench, a high-quality, context-rich benchmark for fine-grained LLM evaluation in code review. Our construction pipeline comprises: (1) Raw Data Crawling, collecting 153.7K issues and pull requests from top-tier repositories; (2) Comprehensive Context Extraction, linking issue-PR pairs for textual context and extracting the full surrounding function or class for code context; and (3) Multi-stage Data Filtering, combining rule-based and LLM-based validation to remove outdated, malformed, or low-value samples, resulting in 67,910 context-enriched entries. ContextCRBench supports three evaluation scenarios aligned with the review workflow: (1) hunk-level quality assessment, (2) line-level defect localization, and (3) line-level comment generation. Evaluating eight leading LLMs (four closed-source and four open-source) reveals that textual context yields greater performance gains than code context alone, while current LLMs remain far from human-level review ability. Deployed at ByteDance, ContextCRBench drives a self-evolving code review system, improving performance by 61.98% and demonstrating its robustness and industrial utility.
CodeVisionary: An Agent-based Framework for Evaluating Large Language Models in Code Generation
Apr 18, 2025Large language models (LLMs) have demonstrated strong capabilities in code generation, underscoring the critical need for rigorous and comprehensive evaluation. Existing evaluation approaches fall into three categories, including human-centered, metric-based, and LLM-based. Considering that human-centered approaches are labour-intensive and metric-based ones overly rely on reference answers, LLM-based approaches are gaining increasing attention due to their stronger contextual understanding capabilities and superior efficiency. However, the performance of LLM-based approaches remains limited due to: (1) lack of multisource domain knowledge, and (2) insufficient comprehension of complex code. To mitigate the limitations, we propose CodeVisionary, the first LLM-based agent framework for evaluating LLMs in code generation. CodeVisionary consists of two stages: (1) Multiscore knowledge analysis stage, which aims to gather multisource and comprehensive domain knowledge by formulating and executing a stepwise evaluation plan. (2) Negotiation-based scoring stage, which involves multiple judges engaging in discussions to better comprehend the complex code and reach a consensus on the evaluation score. Extensive experiments demonstrate that CodeVisionary achieves the best performance for evaluating LLMs in code generation, outperforming the best baseline methods with average improvements of 0.202, 0.139, and 0.117 in Pearson, Spearman, and Kendall-Tau coefficients, respectively. Besides, CodeVisionary provides detailed evaluation reports, which assist developers in identifying shortcomings and making improvements. The resources of CodeVisionary are available at https://anonymous.4open.science/r/CodeVisionary.
An LLM-based Agent for Reliable Docker Environment Configuration
Feb 19, 2025Environment configuration is a critical yet time-consuming step in software development, especially when dealing with unfamiliar code repositories. While Large Language Models (LLMs) demonstrate the potential to accomplish software engineering tasks, existing methods for environment configuration often rely on manual efforts or fragile scripts, leading to inefficiencies and unreliable outcomes. We introduce Repo2Run, the first LLM-based agent designed to fully automate environment configuration and generate executable Dockerfiles for arbitrary Python repositories. We address two major challenges: (1) enabling the LLM agent to configure environments within isolated Docker containers, and (2) ensuring the successful configuration process is recorded and accurately transferred to a Dockerfile without error. To achieve this, we propose atomic configuration synthesis, featuring a dual-environment architecture (internal and external environment) with a rollback mechanism to prevent environment "pollution" from failed commands, guaranteeing atomic execution (execute fully or not at all) and a Dockerfile generator to transfer successful configuration steps into runnable Dockerfiles. We evaluate Repo2Run~on our proposed benchmark of 420 recent Python repositories with unit tests, where it achieves an 86.0% success rate, outperforming the best baseline by 63.9%.
CodeRepoQA: A Large-scale Benchmark for Software Engineering Question Answering
Dec 19, 2024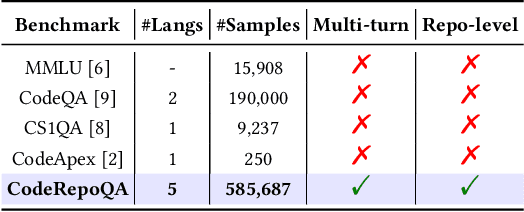
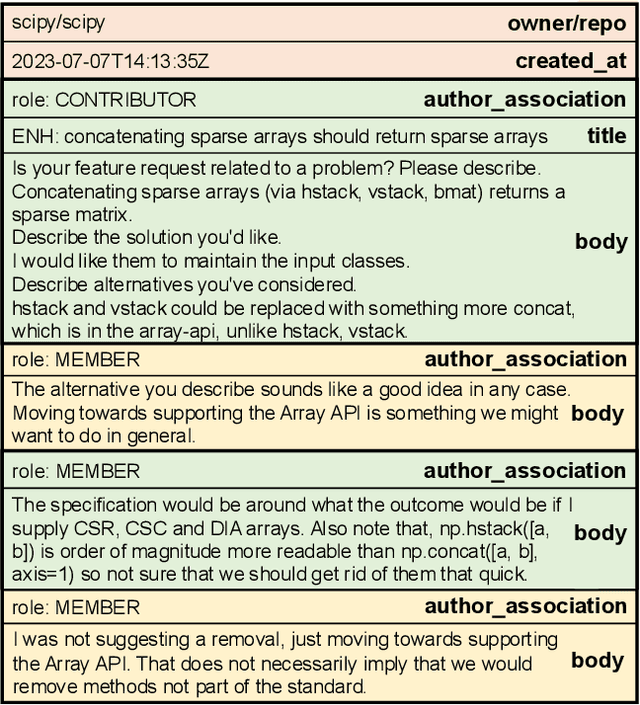

In this work, we introduce CodeRepoQA, a large-scale benchmark specifically designed for evaluating repository-level question-answering capabilities in the field of software engineering. CodeRepoQA encompasses five programming languages and covers a wide range of scenarios, enabling comprehensive evaluation of language models. To construct this dataset, we crawl data from 30 well-known repositories in GitHub, the largest platform for hosting and collaborating on code, and carefully filter raw data. In total, CodeRepoQA is a multi-turn question-answering benchmark with 585,687 entries, covering a diverse array of software engineering scenarios, with an average of 6.62 dialogue turns per entry. We evaluate ten popular large language models on our dataset and provide in-depth analysis. We find that LLMs still have limitations in question-answering capabilities in the field of software engineering, and medium-length contexts are more conducive to LLMs' performance. The entire benchmark is publicly available at https://github.com/kinesiatricssxilm14/CodeRepoQA.
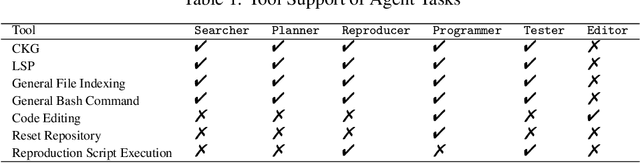
AEGIS: An Agent-based Framework for General Bug Reproduction from Issue Descriptions
Nov 27, 2024In software maintenance, bug reproduction is essential for effective fault localization and repair. Manually writing reproduction scripts is a time-consuming task with high requirements for developers. Hence, automation of bug reproduction has increasingly attracted attention from researchers and practitioners. However, the existing studies on bug reproduction are generally limited to specific bug types such as program crashes, and hard to be applied to general bug reproduction. In this paper, considering the superior performance of agent-based methods in code intelligence tasks, we focus on designing an agent-based framework for the task. Directly employing agents would lead to limited bug reproduction performance, due to entangled subtasks, lengthy retrieved context, and unregulated actions. To mitigate the challenges, we propose an Automated gEneral buG reproductIon Scripts generation framework, named AEGIS, which is the first agent-based framework for the task. AEGIS mainly contains two modules: (1) A concise context construction module, which aims to guide the code agent in extracting structured information from issue descriptions, identifying issue-related code with detailed explanations, and integrating these elements to construct the concise context; (2) A FSM-based multi-feedback optimization module to further regulate the behavior of the code agent within the finite state machine (FSM), ensuring a controlled and efficient script generation process based on multi-dimensional feedback. Extensive experiments on the public benchmark dataset show that AEGIS outperforms the state-of-the-art baseline by 23.0% in F->P metric. In addition, the bug reproduction scripts generated by AEGIS can improve the relative resolved rate of Agentless by 12.5%.
Pyramid-Driven Alignment: Pyramid Principle Guided Integration of Large Language Models and Knowledge Graphs
Oct 17, 2024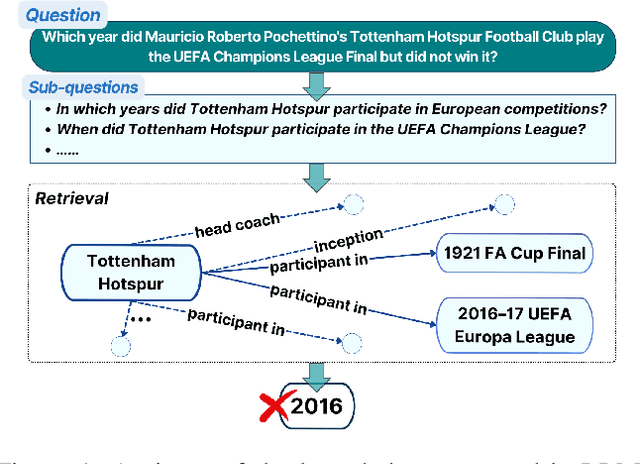
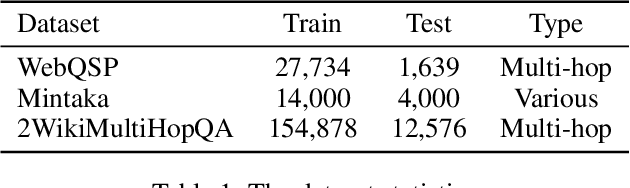
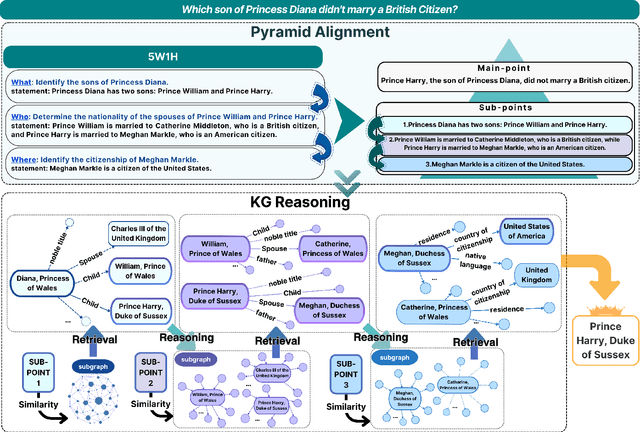
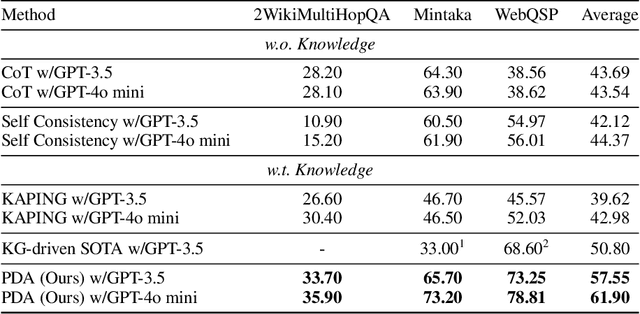
Large Language Models (LLMs) possess impressive reasoning abilities but are prone to generating incorrect information, often referred to as hallucinations. While incorporating external Knowledge Graphs (KGs) can partially mitigate this issue, existing methods primarily treat KGs as static knowledge repositories, overlooking the critical disparity between KG and LLM knowledge, and failing to fully exploit the reasoning capabilities inherent in KGs. To address these limitations, we propose Pyramid-Driven Alignment (PDA), a novel framework for seamlessly integrating LLMs with KGs. PDA utilizes Pyramid Principle analysis to construct a hierarchical pyramid structure. This structure is designed to reflect the input question and generate more validated deductive knowledge, thereby enhancing the alignment of LLMs and KGs and ensuring more cohesive integration. Furthermore, PDA employs a recursive mechanism to harness the underlying reasoning abilities of KGs, resulting in more accurate knowledge retrieval for question-answering tasks. Our experimental results reveal a substantial performance advantage of PDA over state-of-the-art baselines, with improvements reaching 26.70% and 26.78%.
MarsCode Agent: AI-native Automated Bug Fixing
Sep 04, 2024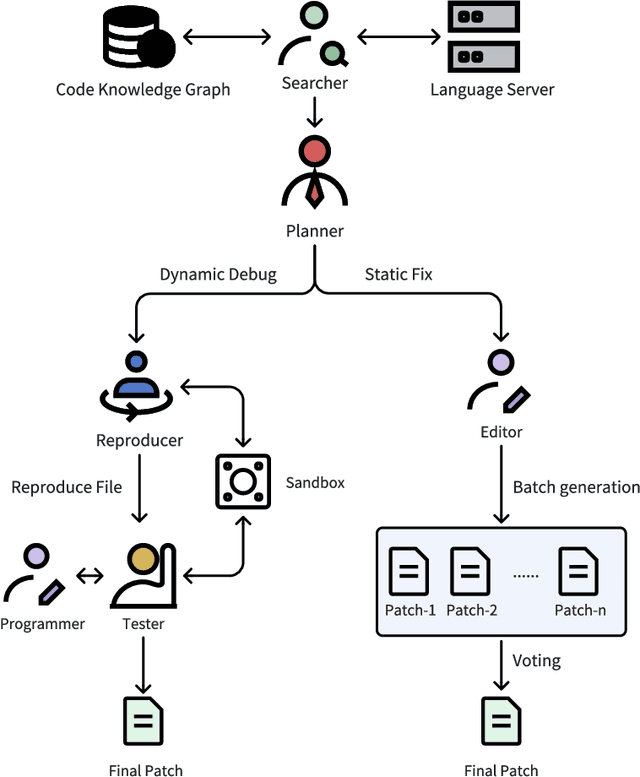
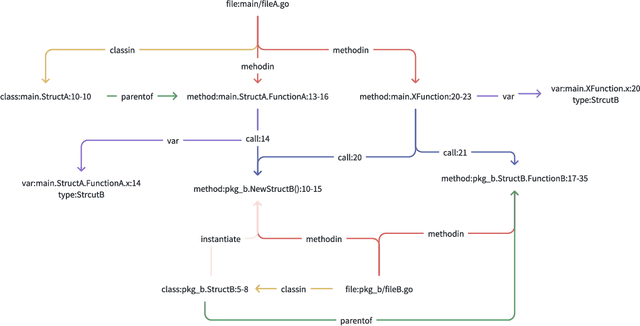
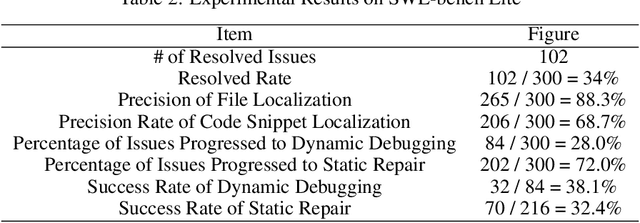
Recent advances in large language models (LLMs) have shown significant potential to automate various software development tasks, including code completion, test generation, and bug fixing. However, the application of LLMs for automated bug fixing remains challenging due to the complexity and diversity of real-world software systems. In this paper, we introduce MarsCode Agent, a novel framework that leverages LLMs to automatically identify and repair bugs in software code. MarsCode Agent combines the power of LLMs with advanced code analysis techniques to accurately localize faults and generate patches. Our approach follows a systematic process of planning, bug reproduction, fault localization, candidate patch generation, and validation to ensure high-quality bug fixes. We evaluated MarsCode Agent on SWE-bench, a comprehensive benchmark of real-world software projects, and our results show that MarsCode Agent achieves a high success rate in bug fixing compared to most of the existing automated approaches.
When Less is Enough: Positive and Unlabeled Learning Model for Vulnerability Detection
Aug 21, 2023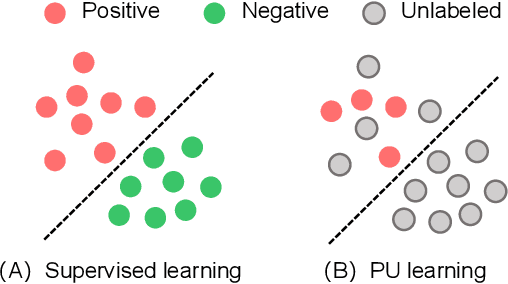
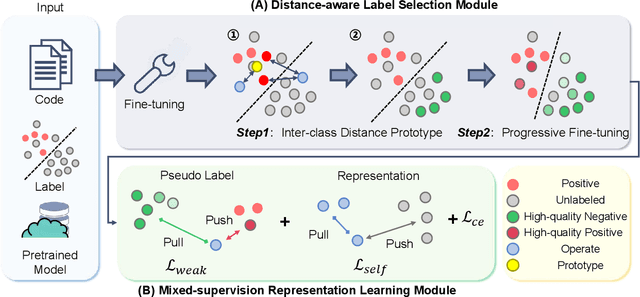
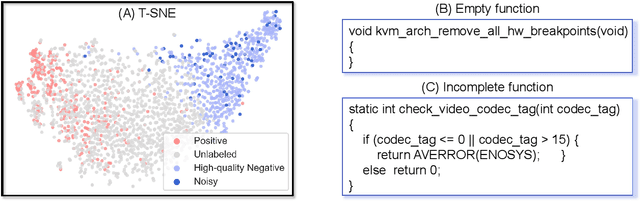
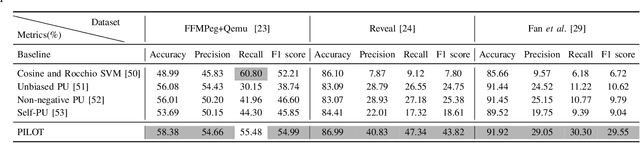
Automated code vulnerability detection has gained increasing attention in recent years. The deep learning (DL)-based methods, which implicitly learn vulnerable code patterns, have proven effective in vulnerability detection. The performance of DL-based methods usually relies on the quantity and quality of labeled data. However, the current labeled data are generally automatically collected, such as crawled from human-generated commits, making it hard to ensure the quality of the labels. Prior studies have demonstrated that the non-vulnerable code (i.e., negative labels) tends to be unreliable in commonly-used datasets, while vulnerable code (i.e., positive labels) is more determined. Considering the large numbers of unlabeled data in practice, it is necessary and worth exploring to leverage the positive data and large numbers of unlabeled data for more accurate vulnerability detection. In this paper, we focus on the Positive and Unlabeled (PU) learning problem for vulnerability detection and propose a novel model named PILOT, i.e., PositIve and unlabeled Learning mOdel for vulnerability deTection. PILOT only learns from positive and unlabeled data for vulnerability detection. It mainly contains two modules: (1) A distance-aware label selection module, aiming at generating pseudo-labels for selected unlabeled data, which involves the inter-class distance prototype and progressive fine-tuning; (2) A mixed-supervision representation learning module to further alleviate the influence of noise and enhance the discrimination of representations.
TiEV: The Tongji Intelligent Electric Vehicle in the Intelligent Vehicle Future Challenge of China
May 07, 2018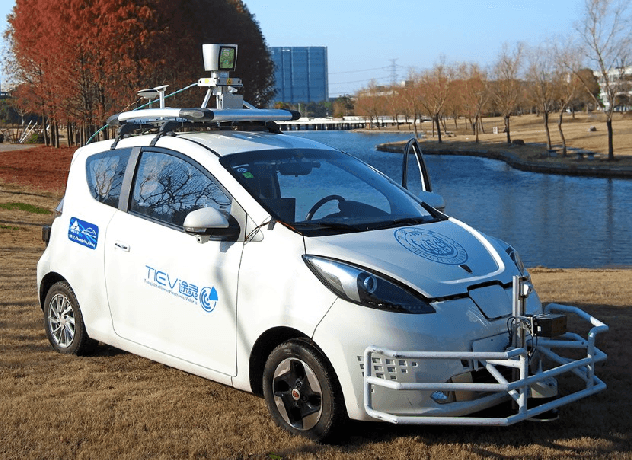
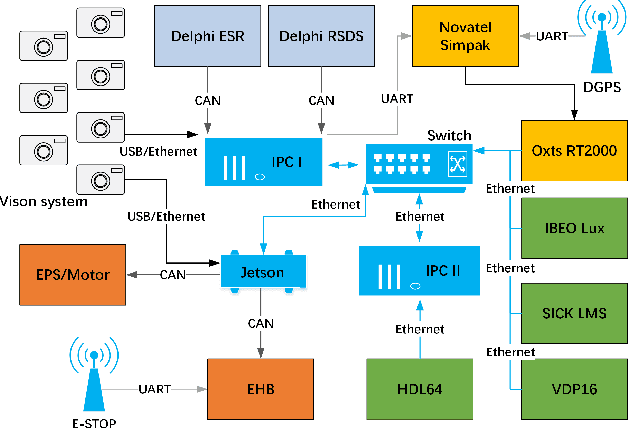
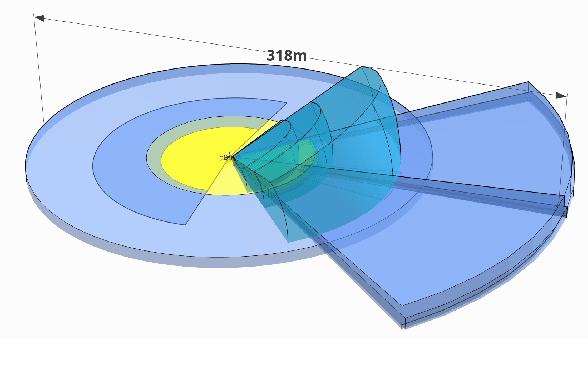
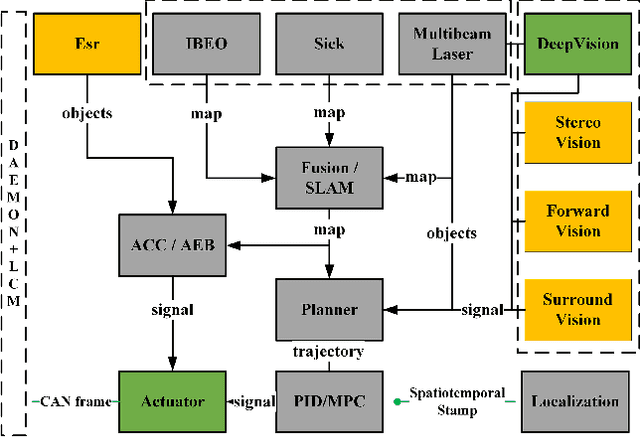
TiEV is an autonomous driving platform implemented by Tongji University of China. The vehicle is drive-by-wire and is fully powered by electricity. We devised the software system of TiEV from scratch, which is capable of driving the vehicle autonomously in urban paths as well as on fast express roads. We describe our whole system, especially novel modules of probabilistic perception fusion, incremental mapping, the 1st and the 2nd planning and the overall safety concern. TiEV finished 2016 and 2017 Intelligent Vehicle Future Challenge of China held at Changshu. We show our experiences on the development of autonomous vehicles and future trends.