 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-based Semantic Mapping and Localization for Autonomous Indoor Parking
Sep 26, 2018


In this paper, we proposed a novel and practical solution for the real-time indoor localization of autonomous driving in parking lots. High-level landmarks, the parking slots, are extracted and enriched with labels to avoid the aliasing of low-level visual features. We then proposed a robust method for detecting incorrect data associations between parking slots and further extended the optimization framework by dynamically eliminating suboptimal data associations. Visual fiducial markers are introduced to improve the overall precision. As a result, a semantic map of the parking lot can be established fully automatically and robustly. We experimented the performance of real-time localization based on the map using our autonomous driving platform TiEV, and the average accuracy of 0.3m track tracing can be achieved at a speed of 10kph.
DLO: Direct LiDAR Odometry for 2.5D Outdoor Environment
Sep 15, 2018


For autonomous vehicles, high-precision real-time localization is the guarantee of stable driving. Compared with the visual odometry (VO), the LiDAR odometry (LO) has the advantages of higher accuracy and better stability. However, 2D LO is only suitable for the indoor environment, and 3D LO has less efficiency in general. Both are not suitable for the online localization of an autonomous vehicle in an outdoor driving environment. In this paper, a direct LO method based on the 2.5D grid map is proposed. The fast semi-dense direct method proposed for VO is employed to register two 2.5D maps. Experiments show that this method is superior to both the 3D-NDT and LOAM in the outdoor environment.
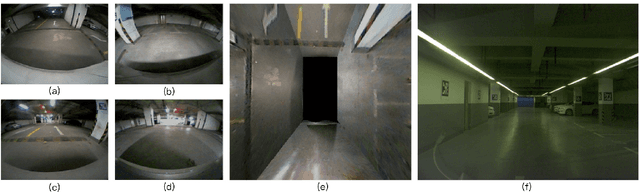
Automatic Vector-based Road Structure Mapping Using Multi-beam LiDAR
Jun 06, 2018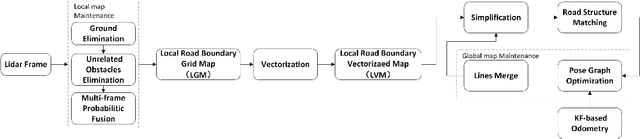

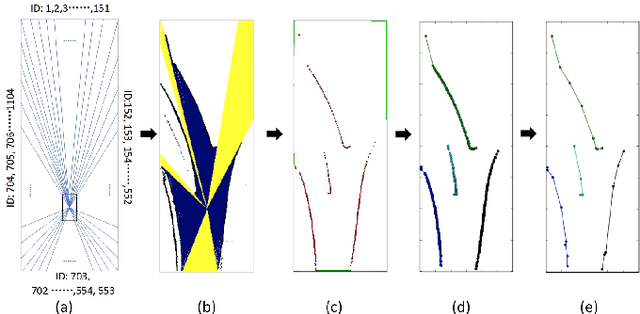
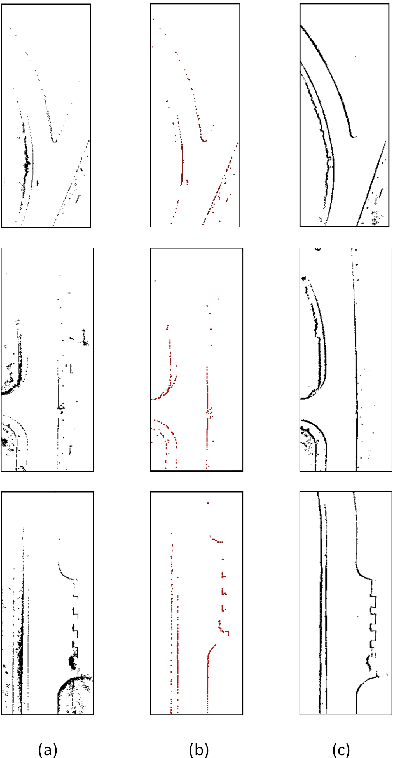
In this paper, we studied a SLAM method for vector-based road structure mapping using multi-beam LiDAR. We propose to use the polyline as the primary mapping element instead of grid cell or point cloud, because the vector-based representation is precise and lightweight, and it can directly generate vector-based High-Definition (HD) driving map as demanded by autonomous driving systems. We explored: 1) the extraction and vectorization of road structures based on local probabilistic fusion. 2) the efficient vector-based matching between frames of road structures. 3) the loop closure and optimization based on the pose-graph. In this study, we took a specific road structure, the road boundary, as an example. We applied the proposed matching method in three different scenes and achieved the average absolute matching error of 0.07. We further applied the mapping system to the urban road with the length of 860 meters and achieved an average global accuracy of 0.466 m without the help of high precision GPS.
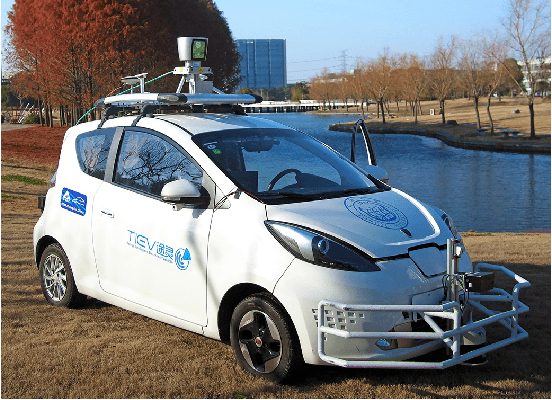
TiEV: The Tongji Intelligent Electric Vehicle in the Intelligent Vehicle Future Challenge of China
May 07, 2018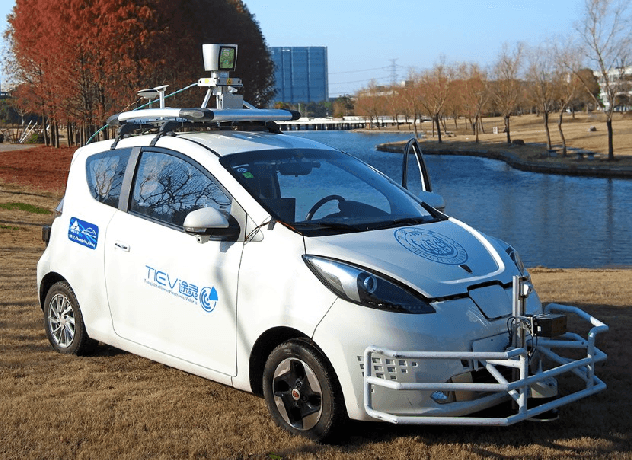
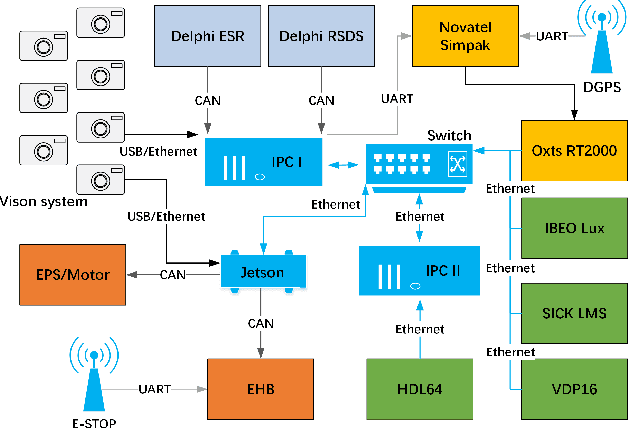
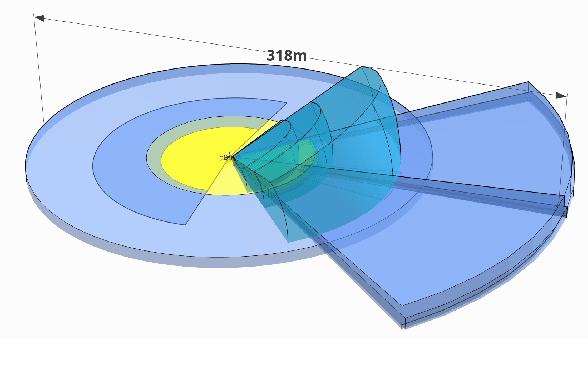
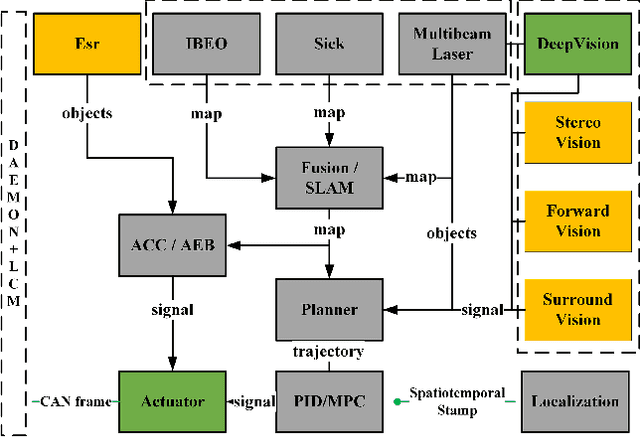
TiEV is an autonomous driving platform implemented by Tongji University of China. The vehicle is drive-by-wire and is fully powered by electricity. We devised the software system of TiEV from scratch, which is capable of driving the vehicle autonomously in urban paths as well as on fast express roads. We describe our whole system, especially novel modules of probabilistic perception fusion, incremental mapping, the 1st and the 2nd planning and the overall safety concern. TiEV finished 2016 and 2017 Intelligent Vehicle Future Challenge of China held at Changshu. We show our experiences on the development of autonomous vehicles and future trends.