 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-based Semantic Mapping and Localization for Autonomous Indoor Parking
Sep 26, 2018
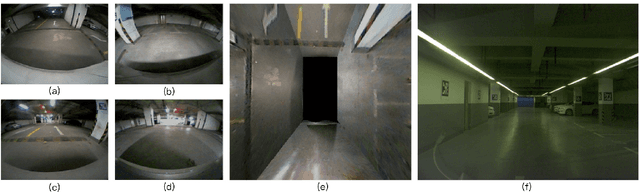


In this paper, we proposed a novel and practical solution for the real-time indoor localization of autonomous driving in parking lots. High-level landmarks, the parking slots, are extracted and enriched with labels to avoid the aliasing of low-level visual features. We then proposed a robust method for detecting incorrect data associations between parking slots and further extended the optimization framework by dynamically eliminating suboptimal data associations. Visual fiducial markers are introduced to improve the overall precision. As a result, a semantic map of the parking lot can be established fully automatically and robustly. We experimented the performance of real-time localization based on the map using our autonomous driving platform TiEV, and the average accuracy of 0.3m track tracing can be achieved at a speed of 10kph.
TiEV: The Tongji Intelligent Electric Vehicle in the Intelligent Vehicle Future Challenge of China
May 07, 2018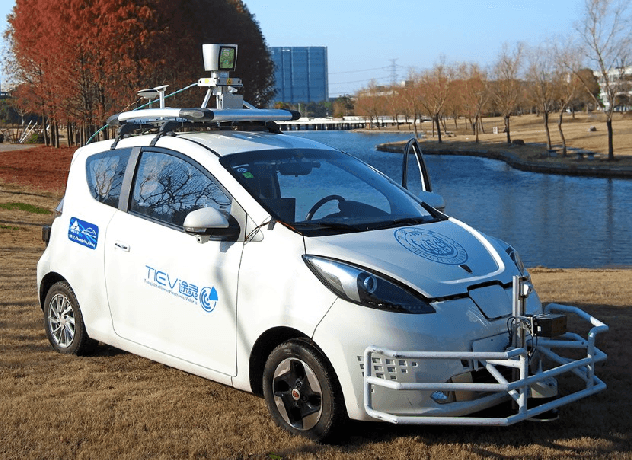
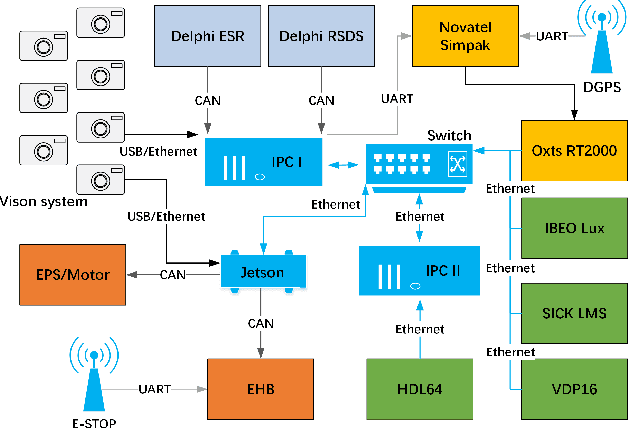
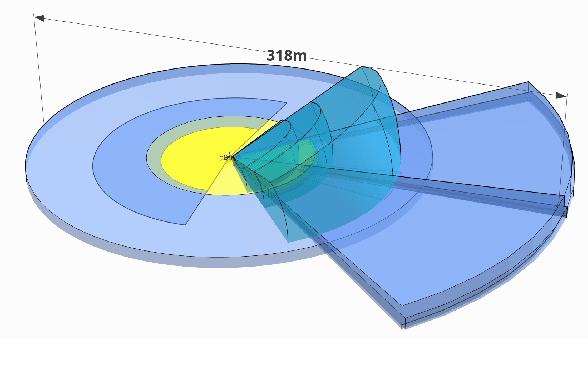
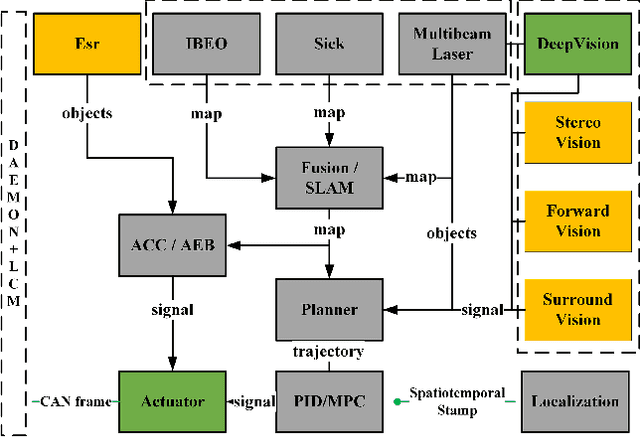
TiEV is an autonomous driving platform implemented by Tongji University of China. The vehicle is drive-by-wire and is fully powered by electricity. We devised the software system of TiEV from scratch, which is capable of driving the vehicle autonomously in urban paths as well as on fast express roads. We describe our whole system, especially novel modules of probabilistic perception fusion, incremental mapping, the 1st and the 2nd planning and the overall safety concern. TiEV finished 2016 and 2017 Intelligent Vehicle Future Challenge of China held at Changshu. We show our experiences on the development of autonomous vehicles and future trends.