 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Scene Generation and Planning: Driving with World Model via Unifying Vision and Motion Representation
Mar 16, 2026End-to-end autonomous driving aims to generate safe and plausible planning policies from raw sensor input. Driving world models have shown great potential in learning rich representations by predicting the future evolution of a driving scene. However, existing driving world models primarily focus on visual scene representation, and motion representation is not explicitly designed to be planner-shared and inheritable, leaving a schism between the optimization of visual scene generation and the requirements of precise motion planning. We present WorldDrive, a holistic framework that couples scene generation and real-time planning via unifying vision and motion representation. We first introduce a Trajectory-aware Driving World Model, which conditions on a trajectory vocabulary to enforce consistency between visual dynamics and motion intentions, enabling the generation of diverse and plausible future scenes conditioned on a specific trajectory. We transfer the vision and motion encoders to a downstream Multi-modal Planner, ensuring the driving policy operates on mature representations pre-optimized by scene generation. A simple interaction between motion representation, visual representation, and ego status can generate high-quality, multi-modal trajectories. Furthermore, to exploit the world model's foresight, we propose a Future-aware Rewarder, which distills future latent representation from the frozen world model to evaluate and select optimal trajectories in real-time. Extensive experiments on the NAVSIM, NAVSIM-v2, and nuScenes benchmarks demonstrate that WorldDrive achieves leading planning performance among vision-only methods while maintaining high-fidelity action-controlled video generation capabilities, providing strong evidence for the effectiveness of unifying vision and motion representation for robust autonomous driving.
HanMoVLM: Large Vision-Language Models for Professional Artistic Painting Evaluation
Mar 11, 2026While Large Vision-Language Models (VLMs) demonstrate impressive general visual capabilities, they remain artistically blind and unable to offer professional evaluation of artworks within specific artistic domains like human experts. To bridge this gap, we transform VLMs into experts capable of professional-grade painting evaluation in the Chinese Artistic Domain, which is more abstract and demands extensive artistic training for evaluation. We introduce HanMo-Bench, a new dataset that features authentic auction-grade masterpieces and AI-generated works, grounded in real-world market valuations. To realize the rigorous judgment, we propose the HanMoVLM and construct a Chain-of-Thought (CoT) validated by experts. This CoT guides the model to perform expert-level reasoning: from content identification and Region of Interest (RoI) localization to professional evaluation, guided by both theme-specific evaluation and typical three-tier evaluation in Chinese paintings. Furthermore, we design a reward function to refine the reasoning process of the HanMoVLM to improve the accuracy. We demonstrate that HanMoVLM can serve as a critical backbone for Test-time Scaling in image generation. By acting as a high-quality verifier, HanMoVLM enables generative models to select the most artistically superior outputs from multiple candidates. Experimental results and human studies confirm that the proposed HanMoVLM effectively bridges the gap, achieving a high consistency with professional experts and significantly improving the quality of Chinese Painting generation.
Towards Geometry-Aware and Motion-Guided Video Human Mesh Recovery
Jan 29, 2026Existing video-based 3D Human Mesh Recovery (HMR) methods often produce physically implausible results, stemming from their reliance on flawed intermediate 3D pose anchors and their inability to effectively model complex spatiotemporal dynamics. To overcome these deep-rooted architectural problems, we introduce HMRMamba, a new paradigm for HMR that pioneers the use of Structured State Space Models (SSMs) for their efficiency and long-range modeling prowess. Our framework is distinguished by two core contributions. First, the Geometry-Aware Lifting Module, featuring a novel dual-scan Mamba architecture, creates a robust foundation for reconstruction. It directly grounds the 2D-to-3D pose lifting process with geometric cues from image features, producing a highly reliable 3D pose sequence that serves as a stable anchor. Second, the Motion-guided Reconstruction Network leverages this anchor to explicitly process kinematic patterns over time. By injecting this crucial temporal awareness, it significantly enhances the final mesh's coherence and robustness, particularly under occlusion and motion blur. Comprehensive evaluations on 3DPW, MPI-INF-3DHP, and Human3.6M benchmarks confirm that HMRMamba sets a new state-of-the-art, outperforming existing methods in both reconstruction accuracy and temporal consistency while offering superior computational efficiency.
From Human Intention to Action Prediction: A Comprehensive Benchmark for Intention-driven End-to-End Autonomous Driving
Dec 13, 2025Current end-to-end autonomous driving systems operate at a level of intelligence akin to following simple steering commands. However, achieving genuinely intelligent autonomy requires a paradigm shift: moving from merely executing low-level instructions to understanding and fulfilling high-level, abstract human intentions. This leap from a command-follower to an intention-fulfiller, as illustrated in our conceptual framework, is hindered by a fundamental challenge: the absence of a standardized benchmark to measure and drive progress on this complex task. To address this critical gap, we introduce Intention-Drive, the first comprehensive benchmark designed to evaluate the ability to translate high-level human intent into safe and precise driving actions. Intention-Drive features two core contributions: (1) a new dataset of complex scenarios paired with corresponding natural language intentions, and (2) a novel evaluation protocol centered on the Intent Success Rate (ISR), which assesses the semantic fulfillment of the human's goal beyond simple geometric accuracy. Through an extensive evaluation of a spectrum of baseline models on Intention-Drive, we reveal a significant performance deficit, showing that the baseline model struggle to achieve the comprehensive scene and intention understanding required for this advanced task.
Self-Rewarding Large Vision-Language Models for Optimizing Prompts in Text-to-Image Generation
May 22, 2025



Text-to-image models are powerful for producing high-quality images based on given text prompts, but crafting these prompts often requires specialized vocabulary. To address this, existing methods train rewriting models with supervision from large amounts of manually annotated data and trained aesthetic assessment models. To alleviate the dependence on data scale for model training and the biases introduced by trained models, we propose a novel prompt optimization framework, designed to rephrase a simple user prompt into a sophisticated prompt to a text-to-image model. Specifically, we employ the large vision language models (LVLMs) as the solver to rewrite the user prompt, and concurrently, employ LVLMs as a reward model to score the aesthetics and alignment of the images generated by the optimized prompt. Instead of laborious human feedback, we exploit the prior knowledge of the LVLM to provide rewards, i.e., AI feedback. Simultaneously, the solver and the reward model are unified into one model and iterated in reinforcement learning to achieve self-improvement by giving a solution and judging itself. Results on two popular datasets demonstrate that our method outperforms other strong competitors.
Towards Better Cephalometric Landmark Detection with Diffusion Data Generation
May 09, 2025Cephalometric landmark detection is essential for orthodontic diagnostics and treatment planning. Nevertheless, the scarcity of samples in data collection and the extensive effort required for manual annotation have significantly impeded the availability of diverse datasets. This limitation has restricted the effectiveness of deep learning-based detection methods, particularly those based on large-scale vision models. To address these challenges, we have developed an innovative data generation method capable of producing diverse cephalometric X-ray images along with corresponding annotations without human intervention. To achieve this, our approach initiates by constructing new cephalometric landmark annotations using anatomical priors. Then, we employ a diffusion-based generator to create realistic X-ray images that correspond closely with these annotations. To achieve precise control in producing samples with different attributes, we introduce a novel prompt cephalometric X-ray image dataset. This dataset includes real cephalometric X-ray images and detailed medical text prompts describing the images. By leveraging these detailed prompts, our method improves the generation process to control different styles and attributes. Facilitated by the large, diverse generated data, we introduce large-scale vision detection models into the cephalometric landmark detection task to improve accuracy. Experimental results demonstrate that training with the generated data substantially enhances the performance. Compared to methods without using the generated data, our approach improves the Success Detection Rate (SDR) by 6.5%, attaining a notable 82.2%. All code and data are available at: https://um-lab.github.io/cepha-generation
Geometry-aware Temporal Aggregation Network for Monocular 3D Lane Detection
Apr 29, 2025Monocular 3D lane detection aims to estimate 3D position of lanes from frontal-view (FV) images. However, current monocular 3D lane detection methods suffer from two limitations, including inaccurate geometric information of the predicted 3D lanes and difficulties in maintaining lane integrity. To address these issues, we seek to fully exploit the potential of multiple input frames. First, we aim at enhancing the ability to perceive the geometry of scenes by leveraging temporal geometric consistency. Second, we strive to improve the integrity of lanes by revealing more instance information from temporal sequences. Therefore, we propose a novel Geometry-aware Temporal Aggregation Network (GTA-Net) for monocular 3D lane detection. On one hand, we develop the Temporal Geometry Enhancement Module (TGEM), which exploits geometric consistency across successive frames, facilitating effective geometry perception. On the other hand, we present the Temporal Instance-aware Query Generation (TIQG), which strategically incorporates temporal cues into query generation, thereby enabling the exploration of comprehensive instance information. Experiments demonstrate that our GTA-Net achieves SoTA results, surpassing existing monocular 3D lane detection solutions.
Reducing CT Metal Artifacts by Learning Latent Space Alignment with Gemstone Spectral Imaging Data
Mar 27, 2025



Metal artifacts in CT slices have long posed challenges in medical diagnostics. These artifacts degrade image quality, resulting in suboptimal visualization and complicating the accurate interpretation of tissues adjacent to metal implants. To address these issues, we introduce the Latent Gemstone Spectral Imaging (GSI) Alignment Framework, which effectively reduces metal artifacts while avoiding the introduction of noise information. Our work is based on a key finding that even artifact-affected ordinary CT sequences contain sufficient information to discern detailed structures. The challenge lies in the inability to clearly represent this information. To address this issue, we developed an Alignment Framework that adjusts the representation of ordinary CT images to match GSI CT sequences. GSI is an advanced imaging technique using multiple energy levels to mitigate artifacts caused by metal implants. By aligning the representation to GSI data, we can effectively suppress metal artifacts while clearly revealing detailed structure, without introducing extraneous information into CT sequences. To facilitate the application, we propose a new dataset, Artifacts-GSI, captured from real patients with metal implants, and establish a new benchmark based on this dataset. Experimental results show that our method significantly reduces metal artifacts and greatly enhances the readability of CT slices. All our code and data are available at: https://um-lab.github.io/GSI-MAR/
DC-ControlNet: Decoupling Inter- and Intra-Element Conditions in Image Generation with Diffusion Models
Feb 20, 2025



In this paper, we introduce DC (Decouple)-ControlNet, a highly flexible and precisely controllable framework for multi-condition image generation. The core idea behind DC-ControlNet is to decouple control conditions, transforming global control into a hierarchical system that integrates distinct elements, contents, and layouts. This enables users to mix these individual conditions with greater flexibility, leading to more efficient and accurate image generation control. Previous ControlNet-based models rely solely on global conditions, which affect the entire image and lack the ability of element- or region-specific control. This limitation reduces flexibility and can cause condition misunderstandings in multi-conditional image generation. To address these challenges, we propose both intra-element and Inter-element Controllers in DC-ControlNet. The Intra-Element Controller handles different types of control signals within individual elements, accurately describing the content and layout characteristics of the object. For interactions between elements, we introduce the Inter-Element Controller, which accurately handles multi-element interactions and occlusion based on user-defined relationships. Extensive evaluations show that DC-ControlNet significantly outperforms existing ControlNet models and Layout-to-Image generative models in terms of control flexibility and precision in multi-condition control.
RAWMamba: Unified sRGB-to-RAW De-rendering With State Space Model
Nov 18, 2024

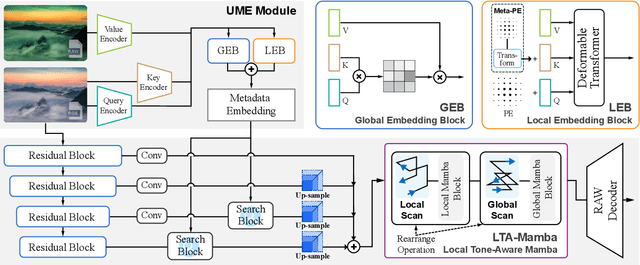
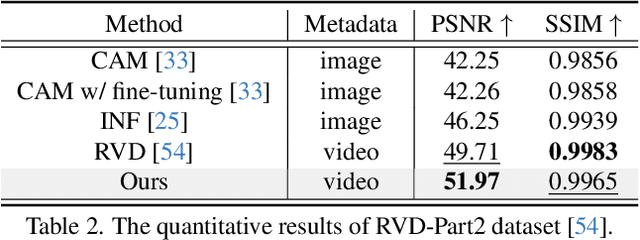
Recent advancements in sRGB-to-RAW de-rendering have increasingly emphasized metadata-driven approaches to reconstruct RAW data from sRGB images, supplemented by partial RAW information. In image-based de-rendering, metadata is commonly obtained through sampling, whereas in video tasks, it is typically derived from the initial frame. The distinct metadata requirements necessitate specialized network architectures, leading to architectural incompatibilities that increase deployment complexity. In this paper, we propose RAWMamba, a Mamba-based unified framework developed for sRGB-to-RAW de-rendering across both image and video domains. The core of RAWMamba is the Unified Metadata Embedding (UME) module, which harmonizes diverse metadata types into a unified representation. In detail, a multi-perspective affinity modeling method is proposed to promote the extraction of reference information. In addition, we introduce the Local Tone-Aware Mamba (LTA-Mamba) module, which captures long-range dependencies to enable effective global propagation of metadata. Experimental results demonstrate that the proposed RAWMamba achieves state-of-the-art performance, yielding high-quality RAW data reconstruction.