 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereoVLA: Enhancing Vision-Language-Action Models with Stereo Vision
Dec 26, 2025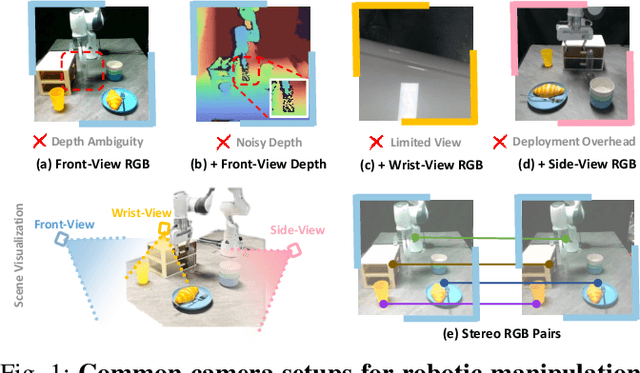
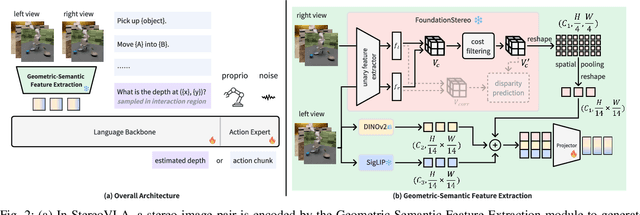
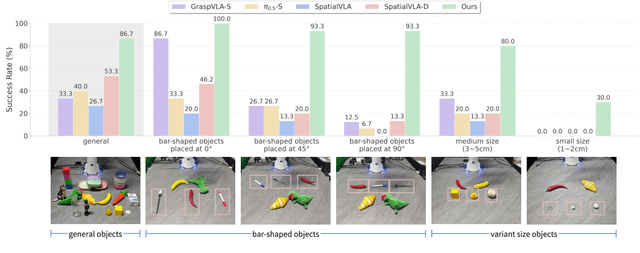
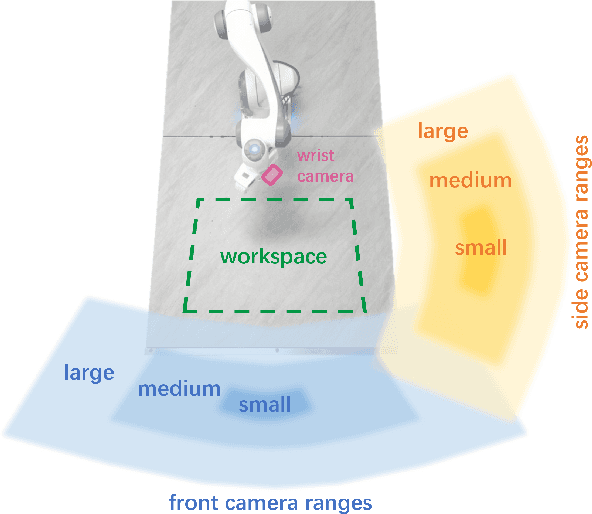
Stereo cameras closely mimic human binocular vision, providing rich spatial cues critical for precise robotic manipulation. Despite their advantage, the adoption of stereo vision in vision-language-action models (VLAs) remains underexplored. In this work, we present StereoVLA, a VLA model that leverages rich geometric cues from stereo vision. We propose a novel Geometric-Semantic Feature Extraction module that utilizes vision foundation models to extract and fuse two key features: 1) geometric features from subtle stereo-view differences for spatial perception; 2) semantic-rich features from the monocular view for instruction following. Additionally, we propose an auxiliary Interaction-Region Depth Estimation task to further enhance spatial perception and accelerate model convergence. Extensive experiments show that our approach outperforms baselines by a large margin in diverse tasks under the stereo setting and demonstrates strong robustness to camera pose variations.
From Human Intention to Action Prediction: A Comprehensive Benchmark for Intention-driven End-to-End Autonomous Driving
Dec 13, 2025Current end-to-end autonomous driving systems operate at a level of intelligence akin to following simple steering commands. However, achieving genuinely intelligent autonomy requires a paradigm shift: moving from merely executing low-level instructions to understanding and fulfilling high-level, abstract human intentions. This leap from a command-follower to an intention-fulfiller, as illustrated in our conceptual framework, is hindered by a fundamental challenge: the absence of a standardized benchmark to measure and drive progress on this complex task. To address this critical gap, we introduce Intention-Drive, the first comprehensive benchmark designed to evaluate the ability to translate high-level human intent into safe and precise driving actions. Intention-Drive features two core contributions: (1) a new dataset of complex scenarios paired with corresponding natural language intentions, and (2) a novel evaluation protocol centered on the Intent Success Rate (ISR), which assesses the semantic fulfillment of the human's goal beyond simple geometric accuracy. Through an extensive evaluation of a spectrum of baseline models on Intention-Drive, we reveal a significant performance deficit, showing that the baseline model struggle to achieve the comprehensive scene and intention understanding required for this advanced task.
Twin Co-Adaptive Dialogue for Progressive Image Generation
Apr 21, 2025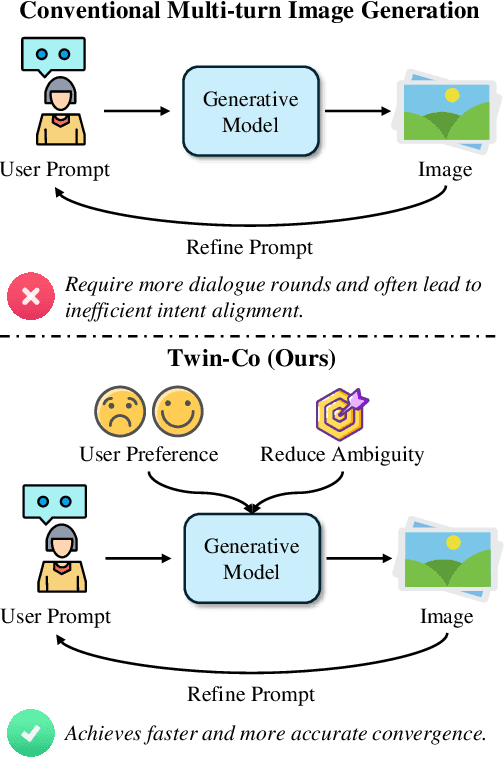
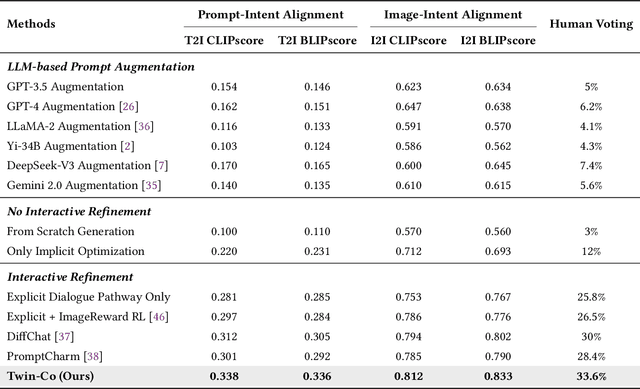
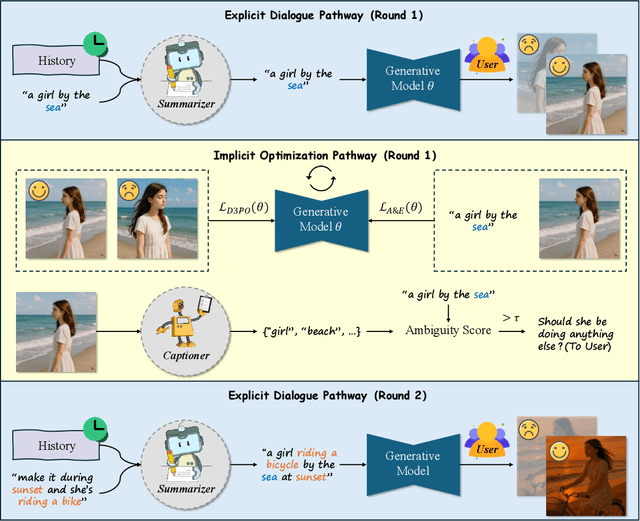

Modern text-to-image generation systems have enabled the creation of remarkably realistic and high-quality visuals, yet they often falter when handling the inherent ambiguities in user prompts. In this work, we present Twin-Co, a framework that leverages synchronized, co-adaptive dialogue to progressively refine image generation. Instead of a static generation process, Twin-Co employs a dynamic, iterative workflow where an intelligent dialogue agent continuously interacts with the user. Initially, a base image is generated from the user's prompt. Then, through a series of synchronized dialogue exchanges, the system adapts and optimizes the image according to evolving user feedback. The co-adaptive process allows the system to progressively narrow down ambiguities and better align with user intent. Experiments demonstrate that Twin-Co not only enhances user experience by reducing trial-and-error iterations but also improves the quality of the generated images, streamlining the creative process across various applications.
A Convex and Global Solution for the P$n$P Problem in 2D Forward-Looking Sonar
Apr 10, 2025

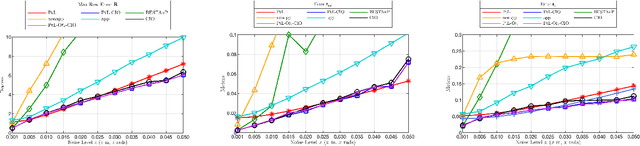
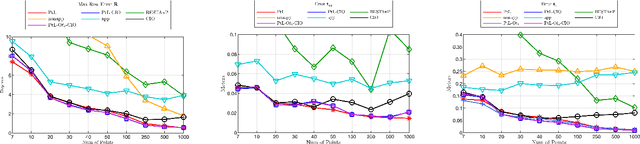
The perspective-$n$-point (P$n$P) problem is important for robotic pose estimation. It is well studied for optical cameras, but research is lacking for 2D forward-looking sonar (FLS) in underwater scenarios due to the vastly different imaging principles. In this paper, we demonstrate that, despite the nonlinearity inherent in sonar image formation, the P$n$P problem for 2D FLS can still be effectively addressed within a point-to-line (PtL) 3D registration paradigm through orthographic approximation. The registration is then resolved by a duality-based optimal solver, ensuring the global optimality. For coplanar cases, a null space analysis is conducted to retrieve the solutions from the dual formulation, enabling the methods to be applied to more general cases. Extensive simulations have been conducted to systematically evaluate the performance under different settings. Compared to non-reprojection-optimized state-of-the-art (SOTA) methods, the proposed approach achieves significantly higher precision. When both methods are optimized, ours demonstrates comparable or slightly superior precision.
Rejecting Outliers in 2D-3D Point Correspondences from 2D Forward-Looking Sonar Observations
Mar 20, 2025Rejecting outliers before applying classical robust methods is a common approach to increase the success rate of estimation, particularly when the outlier ratio is extremely high (e.g. 90%). However, this method often relies on sensor- or task-specific characteristics, which may not be easily transferable across different scenarios. In this paper, we focus on the problem of rejecting 2D-3D point correspondence outliers from 2D forward-looking sonar (2D FLS) observations, which is one of the most popular perception device in the underwater field but has a significantly different imaging mechanism compared to widely used perspective cameras and LiDAR. We fully leverage the narrow field of view in the elevation of 2D FLS and develop two compatibility tests for different 3D point configurations: (1) In general cases, we design a pairwise length in-range test to filter out overly long or short edges formed from point sets; (2) In coplanar cases, we design a coplanarity test to check if any four correspondences are compatible under a coplanar setting. Both tests are integrated into outlier rejection pipelines, where they are followed by maximum clique searching to identify the largest consistent measurement set as inliers. Extensive simulations demonstrate that the proposed methods for general and coplanar cases perform effectively under outlier ratios of 80% and 90%, respectively.
ArtFormer: Controllable Generation of Diverse 3D Articulated Objects
Dec 10, 2024This paper presents a novel framework for modeling and conditional generation of 3D articulated objects. Troubled by flexibility-quality tradeoffs, existing methods are often limited to using predefined structures or retrieving shapes from static datasets. To address these challenges, we parameterize an articulated object as a tree of tokens and employ a transformer to generate both the object's high-level geometry code and its kinematic relations. Subsequently, each sub-part's geometry is further decoded using a signed-distance-function (SDF) shape prior, facilitating the synthesis of high-quality 3D shapes. Our approach enables the generation of diverse objects with high-quality geometry and varying number of parts. Comprehensive experiments on conditional generation from text descriptions demonstrate the effectiveness and flexibility of our method.
Information-Preserved Blending Method for Forward-Looking Sonar Mosaicing in Non-Ideal System Configuration
Dec 10, 2022


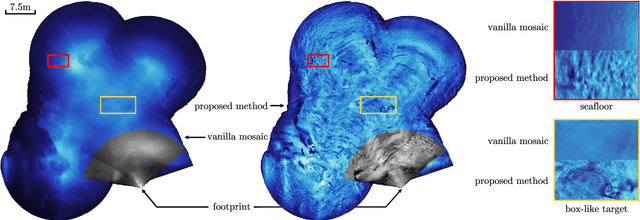
Forward-Looking Sonar (FLS) has started to gain attention in the field of near-bottom close-range underwater inspection because of its high resolution and high framerate features. Although Automatic Target Recognition (ATR) algorithms have been applied tentatively for object-searching tasks, human supervision is still indispensable, especially when involving critical areas. A clear FLS mosaic containing all suspicious information is in demand to help experts deal with tremendous perception data. However, previous work only considered that FLS is working in an ideal system configuration, which assumes an appropriate sonar imaging setup and the availability of accurate positioning data. Without those promises, the intra-frame and inter-frame artifacts will appear and degrade the quality of the final mosaic by making the information of interest invisible. In this paper, we propose a novel blending method for FLS mosaicing which can preserve interested information. A Long-Short Time Sliding Window (LST-SW) is designed to rectify the local statistics of raw sonar images. The statistics are then utilized to construct a Global Variance Map (GVM). The GVM helps to emphasize the useful information contained in images in the blending phase by classifying the informative and featureless pixels, thereby enhancing the quality of final mosaic. The method is verified using data collected in the real environment. The results show that our method can preserve more details in FLS mosaics for human inspection purposes in practice.