 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUP-SLAM: Adaptively Structured Gaussian SLAM with Uncertainty Prediction in Dynamic Environments
May 28, 2025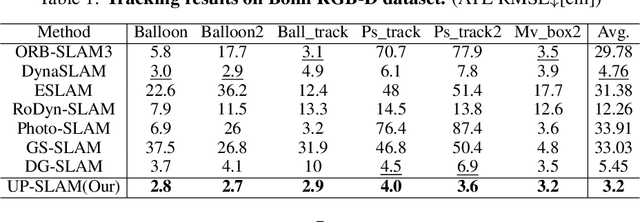
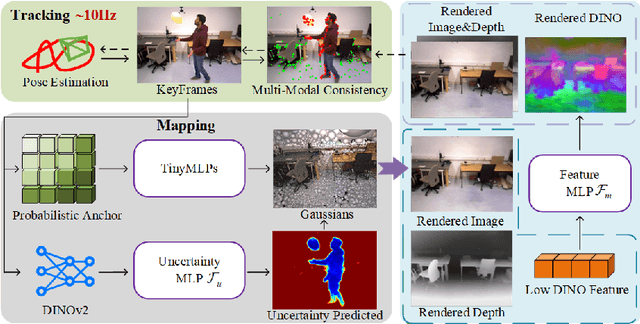
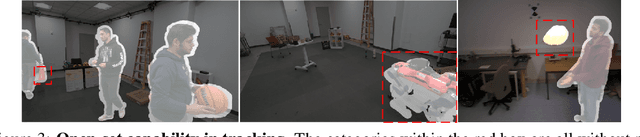
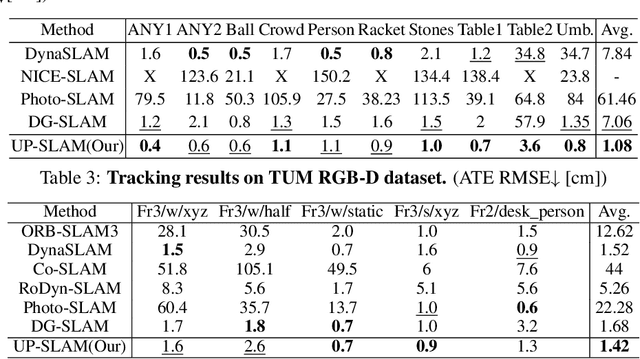
Recent 3D Gaussian Splatting (3DGS) techniques for Visual Simultaneous Localization and Mapping (SLAM) have significantly progressed in tracking and high-fidelity mapping. However, their sequential optimization framework and sensitivity to dynamic objects limit real-time performance and robustness in real-world scenarios. We present UP-SLAM, a real-time RGB-D SLAM system for dynamic environments that decouples tracking and mapping through a parallelized framework. A probabilistic octree is employed to manage Gaussian primitives adaptively, enabling efficient initialization and pruning without hand-crafted thresholds. To robustly filter dynamic regions during tracking, we propose a training-free uncertainty estimator that fuses multi-modal residuals to estimate per-pixel motion uncertainty, achieving open-set dynamic object handling without reliance on semantic labels. Furthermore, a temporal encoder is designed to enhance rendering quality. Concurrently, low-dimensional features are efficiently transformed via a shallow multilayer perceptron to construct DINO features, which are then employed to enrich the Gaussian field and improve the robustness of uncertainty prediction. Extensive experiments on multiple challenging datasets suggest that UP-SLAM outperforms state-of-the-art methods in both localization accuracy (by 59.8%) and rendering quality (by 4.57 dB PSNR), while maintaining real-time performance and producing reusable, artifact-free static maps in dynamic environments.The project: https://aczheng-cai.github.io/up_slam.github.io/
Rethinking Few-Shot Image Fusion: Granular Ball Priors Enable General-Purpose Deep Fusion
Apr 17, 2025



In image fusion tasks, the absence of real fused images as priors presents a fundamental challenge. Most deep learning-based fusion methods rely on large-scale paired datasets to extract global weighting features from raw images, thereby generating fused outputs that approximate real fused images. In contrast to previous studies, this paper explores few-shot training of neural networks under the condition of having prior knowledge. We propose a novel fusion framework named GBFF, and a Granular Ball Significant Extraction algorithm specifically designed for the few-shot prior setting. All pixel pairs involved in the fusion process are initially modeled as a Coarse-Grained Granular Ball. At the local level, Fine-Grained Granular Balls are used to slide through the brightness space to extract Non-Salient Pixel Pairs, and perform splitting operations to obtain Salient Pixel Pairs. Pixel-wise weights are then computed to generate a pseudo-supervised image. At the global level, pixel pairs with significant contributions to the fusion process are categorized into the Positive Region, while those whose contributions cannot be accurately determined are assigned to the Boundary Region. The Granular Ball performs modality-aware adaptation based on the proportion of the positive region, thereby adjusting the neural network's loss function and enabling it to complement the information of the boundary region. Extensive experiments demonstrate the effectiveness of both the proposed algorithm and the underlying theory. Compared with state-of-the-art (SOTA) methods, our approach shows strong competitiveness in terms of both fusion time and image expressiveness. Our code is publicly available at:
Rethinking Few-Shot Fusion: Granular Ball Priors Enable General-Purpose Deep Image Fusion
Apr 11, 2025In image fusion tasks, due to the lack of real fused images as priors, most deep learning-based fusion methods obtain global weight features from original images in large-scale data pairs to generate images that approximate real fused images. However, unlike previous studies, this paper utilizes Granular Ball adaptation to extract features in the brightness space as priors for deep networks, enabling the fusion network to converge quickly and complete the fusion task. This leads to few-shot training for a general image fusion network, and based on this, we propose the GBFF fusion method. According to the information expression division of pixel pairs in the original fused image, we classify pixel pairs with significant performance as the positive domain and non-significant pixel pairs as the boundary domain. We perform split inference in the brightness space using Granular Ball adaptation to compute weights for pixels that express information to varying degrees, generating approximate supervision images that provide priors for the neural network in the structural brightness space. Additionally, the extracted global saliency features also adaptively provide priors for setting the loss function weights of each image in the network, guiding the network to converge quickly at both global and pixel levels alongside the supervised images, thereby enhancing the expressiveness of the fused images. Each modality only used 10 pairs of images as the training set, completing the fusion task with a limited number of iterations. Experiments validate the effectiveness of the algorithm and theory, and qualitative and quantitative comparisons with SOTA methods show that this approach is highly competitive in terms of fusion time and image expressiveness.
A Convex and Global Solution for the P$n$P Problem in 2D Forward-Looking Sonar
Apr 10, 2025

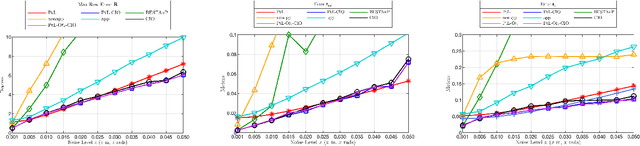
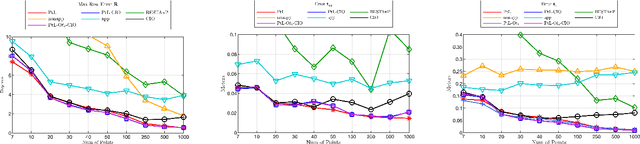
The perspective-$n$-point (P$n$P) problem is important for robotic pose estimation. It is well studied for optical cameras, but research is lacking for 2D forward-looking sonar (FLS) in underwater scenarios due to the vastly different imaging principles. In this paper, we demonstrate that, despite the nonlinearity inherent in sonar image formation, the P$n$P problem for 2D FLS can still be effectively addressed within a point-to-line (PtL) 3D registration paradigm through orthographic approximation. The registration is then resolved by a duality-based optimal solver, ensuring the global optimality. For coplanar cases, a null space analysis is conducted to retrieve the solutions from the dual formulation, enabling the methods to be applied to more general cases. Extensive simulations have been conducted to systematically evaluate the performance under different settings. Compared to non-reprojection-optimized state-of-the-art (SOTA) methods, the proposed approach achieves significantly higher precision. When both methods are optimized, ours demonstrates comparable or slightly superior precision.
Rejecting Outliers in 2D-3D Point Correspondences from 2D Forward-Looking Sonar Observations
Mar 20, 2025Rejecting outliers before applying classical robust methods is a common approach to increase the success rate of estimation, particularly when the outlier ratio is extremely high (e.g. 90%). However, this method often relies on sensor- or task-specific characteristics, which may not be easily transferable across different scenarios. In this paper, we focus on the problem of rejecting 2D-3D point correspondence outliers from 2D forward-looking sonar (2D FLS) observations, which is one of the most popular perception device in the underwater field but has a significantly different imaging mechanism compared to widely used perspective cameras and LiDAR. We fully leverage the narrow field of view in the elevation of 2D FLS and develop two compatibility tests for different 3D point configurations: (1) In general cases, we design a pairwise length in-range test to filter out overly long or short edges formed from point sets; (2) In coplanar cases, we design a coplanarity test to check if any four correspondences are compatible under a coplanar setting. Both tests are integrated into outlier rejection pipelines, where they are followed by maximum clique searching to identify the largest consistent measurement set as inliers. Extensive simulations demonstrate that the proposed methods for general and coplanar cases perform effectively under outlier ratios of 80% and 90%, respectively.
DM-SBL: Channel Estimation under Structured Interference
Dec 07, 2024



Channel estimation is a fundamental task in communication systems and is critical for effective demodulation. While most works deal with a simple scenario where the measurements are corrupted by the additive white Gaussian noise (AWGN), this work addresses the more challenging scenario where both AWGN and structured interference coexist. Such conditions arise, for example, when a sonar/radar transmitter and a communication receiver operate simultaneously within the same bandwidth. To ensure accurate channel estimation in these scenarios, the sparsity of the channel in the delay domain and the complicate structure of the interference are jointly exploited. Firstly, the score of the structured interference is learned via a neural network based on the diffusion model (DM), while the channel prior is modeled as a Gaussian distribution, with its variance controlling channel sparsity, similar to the setup of the sparse Bayesian learning (SBL). Then, two efficient posterior sampling methods are proposed to jointly estimate the sparse channel and the interference. Nuisance parameters, such as the variance of the prior are estimated via the expectation maximization (EM) algorithm. The proposed method is termed as DM based SBL (DM-SBL). Numerical simulations demonstrate that DM-SBL significantly outperforms conventional approaches that deal with the AWGN scenario, particularly under low signal-to-interference ratio (SIR) conditions. Beyond channel estimation, DM-SBL also shows promise for addressing other linear inverse problems involving structured interference.
GSORB-SLAM: Gaussian Splatting SLAM benefits from ORB features and Transmittance information
Oct 15, 2024The emergence of 3D Gaussian Splatting (3DGS) has recently sparked a renewed wave of dense visual SLAM research. However, current methods face challenges such as sensitivity to artifacts and noise, sub-optimal selection of training viewpoints, and a lack of light global optimization. In this paper, we propose a dense SLAM system that tightly couples 3DGS with ORB features. We design a joint optimization approach for robust tracking and effectively reducing the impact of noise and artifacts. This involves combining novel geometric observations, derived from accumulated transmittance, with ORB features extracted from pixel data. Furthermore, to improve mapping quality, we propose an adaptive Gaussian expansion and regularization method that enables Gaussian primitives to represent the scene compactly. This is coupled with a viewpoint selection strategy based on the hybrid graph to mitigate over-fitting effects and enhance convergence quality. Finally, our approach achieves compact and high-quality scene representations and accurate localization. GSORB-SLAM has been evaluated on different datasets, demonstrating outstanding performance. The code will be available.
InstantStyleGaussian: Efficient Art Style Transfer with 3D Gaussian Splatting
Aug 08, 2024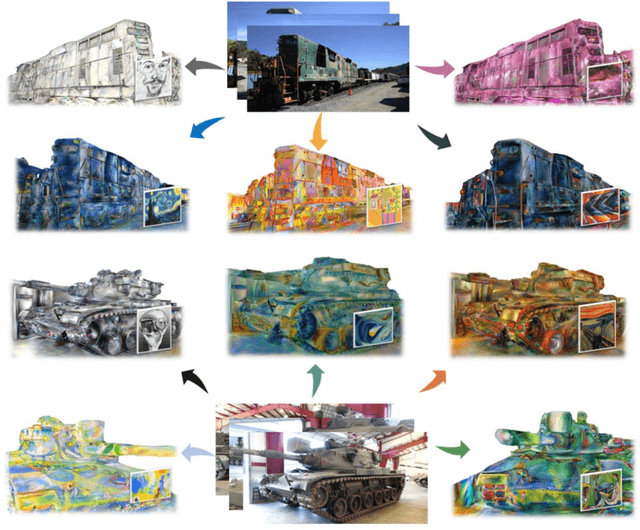
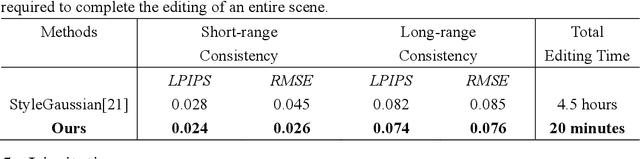
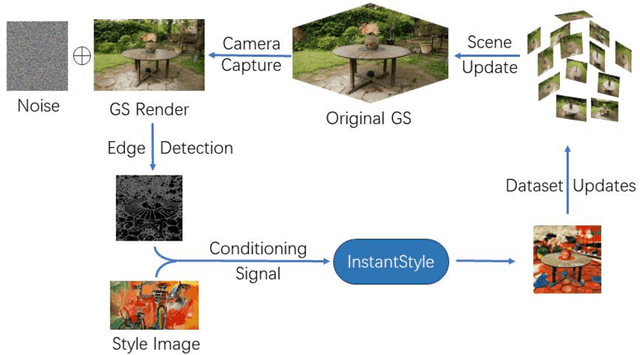

We present InstantStyleGaussian, an innovative 3D style transfer method based on the 3D Gaussian Splatting (3DGS) scene representation. By inputting a target style image, it quickly generates new 3D GS scenes. Our approach operates on pre-reconstructed GS scenes, combining diffusion models with an improved iterative dataset update strategy. It utilizes diffusion models to generate target style images, adds these new images to the training dataset, and uses this dataset to iteratively update and optimize the GS scenes. Extensive experimental results demonstrate that our method ensures high-quality stylized scenes while offering significant advantages in style transfer speed and consistency.
Joint Channel Estimation and Turbo Equalization of Single-Carrier Systems over Time-Varying Channels
May 16, 2023



Block transmission systems have been proven successful over frequency-selective channels. For time-varying channel such as in high-speed mobile communication and underwater communication, existing equalizers assume that channels over different data frames are independent. However, the real-world channels over different data frames are correlated, thereby indicating potentials for performance improvement. In this paper, we propose a joint channel estimation and equalization/decoding algorithm for a single-carrier system that exploits temporal correlations of channel between transmitted data frames. Leveraging the concept of dynamic compressive sensing, our method can utilize the information of several data frames to achieve better performance. The information not only passes between the channel and symbol, but also the channels over different data frames. Numerical simulations using an extensively validated underwater acoustic model with a time-varying channel establish that the proposed algorithm outperforms the former bilinear generalized approximate message passing equalizer and classic minimum mean square error turbo equalizer in bit error rate and channel estimation normalized mean square error. The algorithm idea we present can also find applications in other bilinear multiple measurements vector compressive sensing problems.
Information-Preserved Blending Method for Forward-Looking Sonar Mosaicing in Non-Ideal System Configuration
Dec 10, 2022


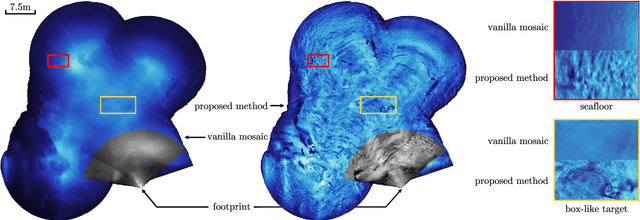
Forward-Looking Sonar (FLS) has started to gain attention in the field of near-bottom close-range underwater inspection because of its high resolution and high framerate features. Although Automatic Target Recognition (ATR) algorithms have been applied tentatively for object-searching tasks, human supervision is still indispensable, especially when involving critical areas. A clear FLS mosaic containing all suspicious information is in demand to help experts deal with tremendous perception data. However, previous work only considered that FLS is working in an ideal system configuration, which assumes an appropriate sonar imaging setup and the availability of accurate positioning data. Without those promises, the intra-frame and inter-frame artifacts will appear and degrade the quality of the final mosaic by making the information of interest invisible. In this paper, we propose a novel blending method for FLS mosaicing which can preserve interested information. A Long-Short Time Sliding Window (LST-SW) is designed to rectify the local statistics of raw sonar images. The statistics are then utilized to construct a Global Variance Map (GVM). The GVM helps to emphasize the useful information contained in images in the blending phase by classifying the informative and featureless pixels, thereby enhancing the quality of final mosaic. The method is verified using data collected in the real environment. The results show that our method can preserve more details in FLS mosaics for human inspection purposes in practice.