 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDM-SBL: Channel Estimation under Structured Interference
Dec 07, 2024



Channel estimation is a fundamental task in communication systems and is critical for effective demodulation. While most works deal with a simple scenario where the measurements are corrupted by the additive white Gaussian noise (AWGN), this work addresses the more challenging scenario where both AWGN and structured interference coexist. Such conditions arise, for example, when a sonar/radar transmitter and a communication receiver operate simultaneously within the same bandwidth. To ensure accurate channel estimation in these scenarios, the sparsity of the channel in the delay domain and the complicate structure of the interference are jointly exploited. Firstly, the score of the structured interference is learned via a neural network based on the diffusion model (DM), while the channel prior is modeled as a Gaussian distribution, with its variance controlling channel sparsity, similar to the setup of the sparse Bayesian learning (SBL). Then, two efficient posterior sampling methods are proposed to jointly estimate the sparse channel and the interference. Nuisance parameters, such as the variance of the prior are estimated via the expectation maximization (EM) algorithm. The proposed method is termed as DM based SBL (DM-SBL). Numerical simulations demonstrate that DM-SBL significantly outperforms conventional approaches that deal with the AWGN scenario, particularly under low signal-to-interference ratio (SIR) conditions. Beyond channel estimation, DM-SBL also shows promise for addressing other linear inverse problems involving structured interference.
Joint Channel Estimation and Turbo Equalization of Single-Carrier Systems over Time-Varying Channels
May 16, 2023



Block transmission systems have been proven successful over frequency-selective channels. For time-varying channel such as in high-speed mobile communication and underwater communication, existing equalizers assume that channels over different data frames are independent. However, the real-world channels over different data frames are correlated, thereby indicating potentials for performance improvement. In this paper, we propose a joint channel estimation and equalization/decoding algorithm for a single-carrier system that exploits temporal correlations of channel between transmitted data frames. Leveraging the concept of dynamic compressive sensing, our method can utilize the information of several data frames to achieve better performance. The information not only passes between the channel and symbol, but also the channels over different data frames. Numerical simulations using an extensively validated underwater acoustic model with a time-varying channel establish that the proposed algorithm outperforms the former bilinear generalized approximate message passing equalizer and classic minimum mean square error turbo equalizer in bit error rate and channel estimation normalized mean square error. The algorithm idea we present can also find applications in other bilinear multiple measurements vector compressive sensing problems.
Information-Preserved Blending Method for Forward-Looking Sonar Mosaicing in Non-Ideal System Configuration
Dec 10, 2022


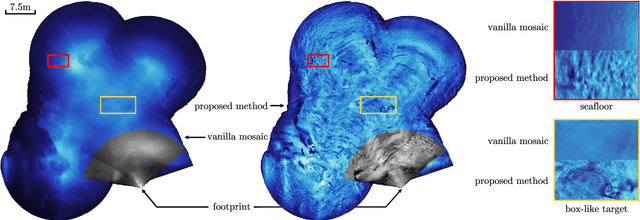
Forward-Looking Sonar (FLS) has started to gain attention in the field of near-bottom close-range underwater inspection because of its high resolution and high framerate features. Although Automatic Target Recognition (ATR) algorithms have been applied tentatively for object-searching tasks, human supervision is still indispensable, especially when involving critical areas. A clear FLS mosaic containing all suspicious information is in demand to help experts deal with tremendous perception data. However, previous work only considered that FLS is working in an ideal system configuration, which assumes an appropriate sonar imaging setup and the availability of accurate positioning data. Without those promises, the intra-frame and inter-frame artifacts will appear and degrade the quality of the final mosaic by making the information of interest invisible. In this paper, we propose a novel blending method for FLS mosaicing which can preserve interested information. A Long-Short Time Sliding Window (LST-SW) is designed to rectify the local statistics of raw sonar images. The statistics are then utilized to construct a Global Variance Map (GVM). The GVM helps to emphasize the useful information contained in images in the blending phase by classifying the informative and featureless pixels, thereby enhancing the quality of final mosaic. The method is verified using data collected in the real environment. The results show that our method can preserve more details in FLS mosaics for human inspection purposes in practice.