 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePaperGuide: Making Small Language-Model Paper-Reading Agents More Efficient
Jan 19, 2026The accelerating growth of the scientific literature makes it increasingly difficult for researchers to track new advances through manual reading alone. Recent progress in large language models (LLMs) has therefore spurred interest in autonomous agents that can read scientific papers and extract task-relevant information. However, most existing approaches rely either on heavily engineered prompting or on a conventional SFT-RL training pipeline, both of which often lead to excessive and low-yield exploration. Drawing inspiration from cognitive science, we propose PaperCompass, a framework that mitigates these issues by separating high-level planning from fine-grained execution. PaperCompass first drafts an explicit plan that outlines the intended sequence of actions, and then performs detailed reasoning to instantiate each step by selecting the parameters for the corresponding function calls. To train such behavior, we introduce Draft-and-Follow Policy Optimization (DFPO), a tailored RL method that jointly optimizes both the draft plan and the final solution. DFPO can be viewed as a lightweight form of hierarchical reinforcement learning, aimed at narrowing the `knowing-doing' gap in LLMs. We provide a theoretical analysis that establishes DFPO's favorable optimization properties, supporting a stable and reliable training process. Experiments on paper-based question answering (Paper-QA) benchmarks show that PaperCompass improves efficiency over strong baselines without sacrificing performance, achieving results comparable to much larger models.
NeuSym-RAG: Hybrid Neural Symbolic Retrieval with Multiview Structuring for PDF Question Answering
May 26, 2025The increasing number of academic papers poses significant challenges for researchers to efficiently acquire key details. While retrieval augmented generation (RAG) shows great promise in large language model (LLM) based automated question answering, previous works often isolate neural and symbolic retrieval despite their complementary strengths. Moreover, conventional single-view chunking neglects the rich structure and layout of PDFs, e.g., sections and tables. In this work, we propose NeuSym-RAG, a hybrid neural symbolic retrieval framework which combines both paradigms in an interactive process. By leveraging multi-view chunking and schema-based parsing, NeuSym-RAG organizes semi-structured PDF content into both the relational database and vectorstore, enabling LLM agents to iteratively gather context until sufficient to generate answers. Experiments on three full PDF-based QA datasets, including a self-annotated one AIRQA-REAL, show that NeuSym-RAG stably defeats both the vector-based RAG and various structured baselines, highlighting its capacity to unify both retrieval schemes and utilize multiple views. Code and data are publicly available at https://github.com/X-LANCE/NeuSym-RAG.
BrainOOD: Out-of-distribution Generalizable Brain Network Analysis
Feb 02, 2025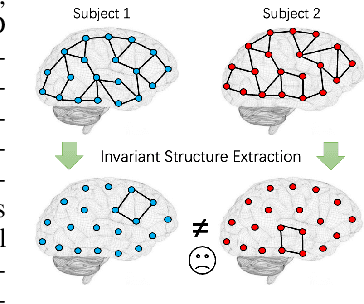

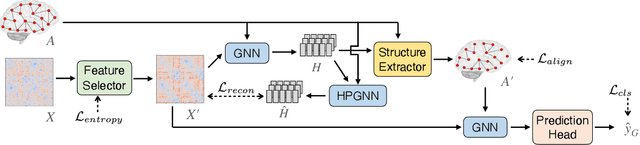
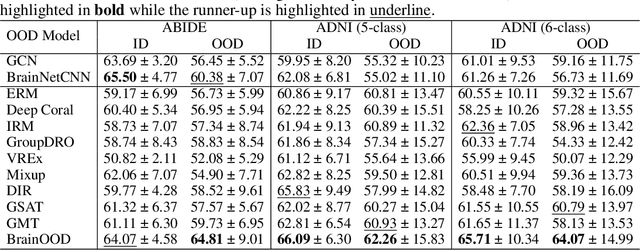
In neuroscience, identifying distinct patterns linked to neurological disorders, such as Alzheimer's and Autism, is critical for early diagnosis and effective intervention. Graph Neural Networks (GNNs) have shown promising in analyzing brain networks, but there are two major challenges in using GNNs: (1) distribution shifts in multi-site brain network data, leading to poor Out-of-Distribution (OOD) generalization, and (2) limited interpretability in identifying key brain regions critical to neurological disorders. Existing graph OOD methods, while effective in other domains, struggle with the unique characteristics of brain networks. To bridge these gaps, we introduce BrainOOD, a novel framework tailored for brain networks that enhances GNNs' OOD generalization and interpretability. BrainOOD framework consists of a feature selector and a structure extractor, which incorporates various auxiliary losses including an improved Graph Information Bottleneck (GIB) objective to recover causal subgraphs. By aligning structure selection across brain networks and filtering noisy features, BrainOOD offers reliable interpretations of critical brain regions. Our approach outperforms 16 existing methods and improves generalization to OOD subjects by up to 8.5%. Case studies highlight the scientific validity of the patterns extracted, which aligns with the findings in known neuroscience literature. We also propose the first OOD brain network benchmark, which provides a foundation for future research in this field. Our code is available at https://github.com/AngusMonroe/BrainOOD.
Vertical Federated Learning Hybrid Local Pre-training
May 21, 2024Vertical Federated Learning (VFL), which has a broad range of real-world applications, has received much attention in both academia and industry. Enterprises aspire to exploit more valuable features of the same users from diverse departments to boost their model prediction skills. VFL addresses this demand and concurrently secures individual parties from exposing their raw data. However, conventional VFL encounters a bottleneck as it only leverages aligned samples, whose size shrinks with more parties involved, resulting in data scarcity and the waste of unaligned data. To address this problem, we propose a novel VFL Hybrid Local Pre-training (VFLHLP) approach. VFLHLP first pre-trains local networks on the local data of participating parties. Then it utilizes these pre-trained networks to adjust the sub-model for the labeled party or enhance representation learning for other parties during downstream federated learning on aligned data, boosting the performance of federated models. The experimental results on real-world advertising datasets, demonstrate that our approach achieves the best performance over baseline methods by large margins. The ablation study further illustrates the contribution of each technique in VFLHLP to its overall performance.
Learning to Evolve on Dynamic Graphs
Nov 13, 2021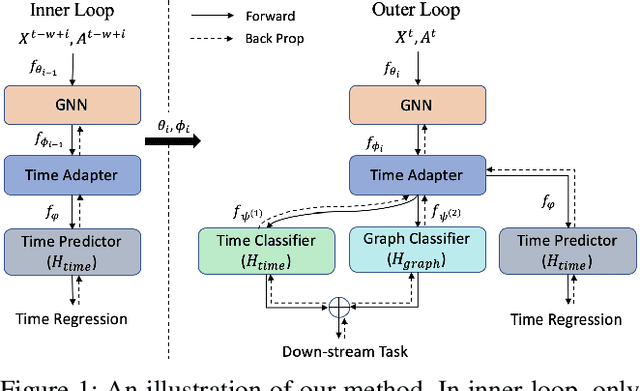

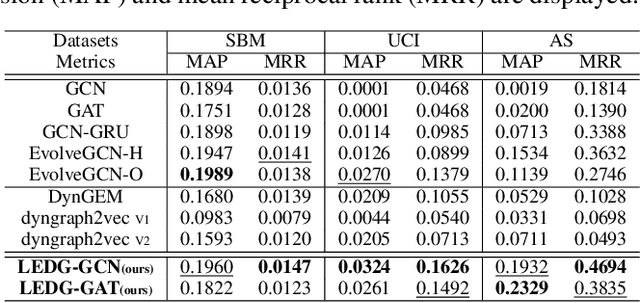
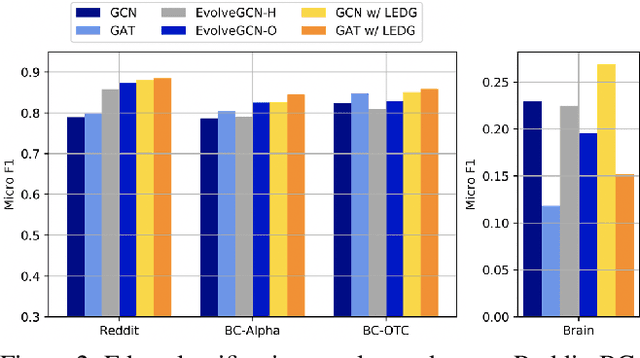
Representation learning in dynamic graphs is a challenging problem because the topology of graph and node features vary at different time. This requires the model to be able to effectively capture both graph topology information and temporal information. Most existing works are built on recurrent neural networks (RNNs), which are used to exact temporal information of dynamic graphs, and thus they inherit the same drawbacks of RNNs. In this paper, we propose Learning to Evolve on Dynamic Graphs (LEDG) - a novel algorithm that jointly learns graph information and time information. Specifically, our approach utilizes gradient-based meta-learning to learn updating strategies that have better generalization ability than RNN on snapshots. It is model-agnostic and thus can train any message passing based graph neural network (GNN) on dynamic graphs. To enhance the representation power, we disentangle the embeddings into time embeddings and graph intrinsic embeddings. We conduct experiments on various datasets and down-stream tasks, and the experimental results validate the effectiveness of our method.
DA-HGT: Domain Adaptive Heterogeneous Graph Transformer
Dec 10, 2020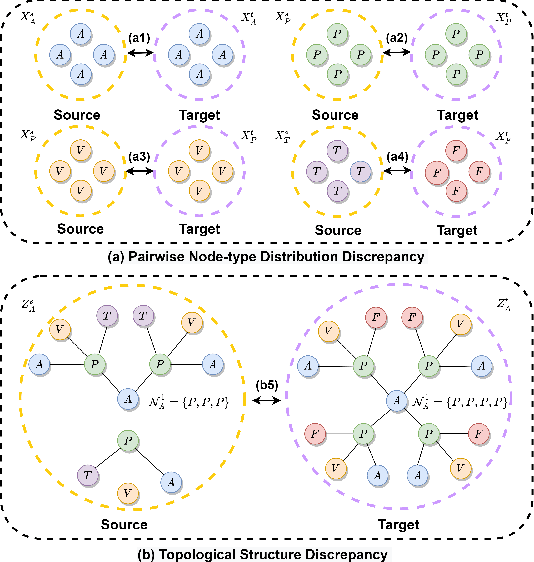

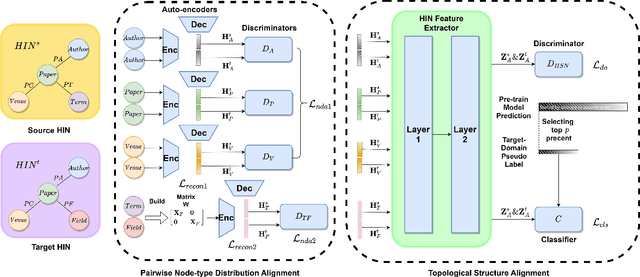
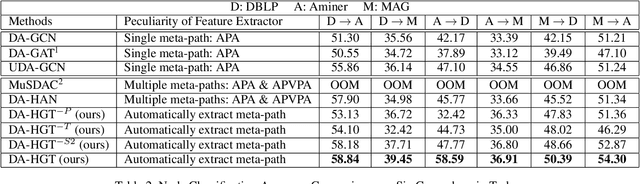
Domain adaptation using graph networks is to learn label-discriminative and network-invariant node embeddings by sharing graph parameters. Most existing works focus on domain adaptation of homogeneous networks, and just a few works begin to study heterogeneous cases that only consider the shared node types but ignore the private node types in individual networks. However, for a given source and target heterogeneous networks, they generally contain shared and private node types, where private types bring an extra challenge for graph domain adaptation. In this paper, we investigate Heterogeneous Information Networks (HINs) with partial shared node types and propose a novel domain adaptive heterogeneous graph transformer (DA-HGT) to handle the domain shift between them. DA-HGT can not only align the distributions of identical-type nodes and edges in two HINs but also make full use of different-type nodes and edges to improve the performance of knowledge transfer. Extensive experiments on several datasets demonstrate that DA-HGT can outperform state-of-the-art methods in various domain adaptation tasks across heterogeneous networks.
Hierarchial Reinforcement Learning in StarCraft II with Human Expertise in Subgoals Selection
Aug 08, 2020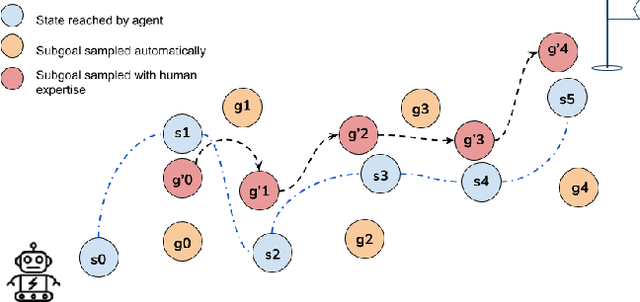
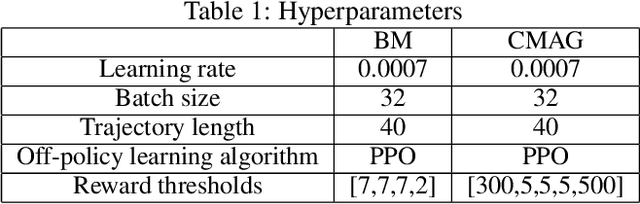
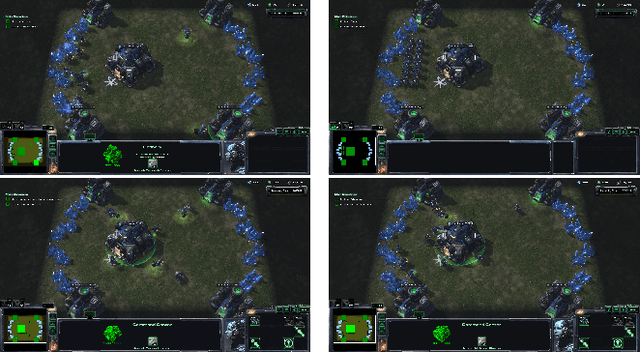
This work is inspired by recent advances in hierarchical reinforcement learning (HRL) (Barto and Mahadevan 2003;Hengst 2010), and improvements in learning efficiency with heuristic-based subgoal selection and hindsight experience replay (HER)(Andrychowicz et al. 2017; Levy et al. 2019). We propose a new method to integrate HRL, HER and effective subgoal selection based on human expertise to support sample-efficient learning and enhance interpretability of the agent's behavior. Human expertise remains indispensable in many areas such as medicine (Buch, Ahmed, and Maruthappu 2018) and law (Cath 2018), where interpretability, explainability and transparency are crucial in the decision making process, for ethical and legal reasons. Our method simplifies the complex task sets for achieving the overall objectives by decomposing into subgoals at different levels of abstraction. Incorporating relevant subjective knowledge also significantly reduces the computational resources spent in exploration for RL, especially in high speed, changing, and complex environments where the transition dynamics cannot be effectively learned and modelled in a short time. Experimental results in two StarCraft II (SC2) minigames demonstrate that our method can achieve better sample efficiency than flat and end-to-end RL methods, and provide an effective method for explaining the agent's performance.