 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploration by Random Reward Perturbation
Jun 10, 2025We introduce Random Reward Perturbation (RRP), a novel exploration strategy for reinforcement learning (RL). Our theoretical analyses demonstrate that adding zero-mean noise to environmental rewards effectively enhances policy diversity during training, thereby expanding the range of exploration. RRP is fully compatible with the action-perturbation-based exploration strategies, such as $\epsilon$-greedy, stochastic policies, and entropy regularization, providing additive improvements to exploration effects. It is general, lightweight, and can be integrated into existing RL algorithms with minimal implementation effort and negligible computational overhead. RRP establishes a theoretical connection between reward shaping and noise-driven exploration, highlighting their complementary potential. Experiments show that RRP significantly boosts the performance of Proximal Policy Optimization and Soft Actor-Critic, achieving higher sample efficiency and escaping local optima across various tasks, under both sparse and dense reward scenarios.
Causal Policy Learning in Reinforcement Learning: Backdoor-Adjusted Soft Actor-Critic
Jun 05, 2025
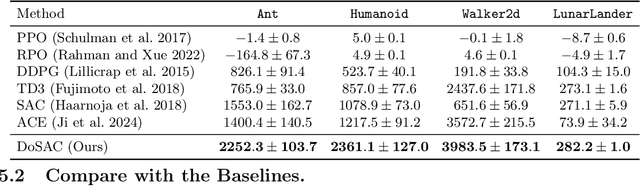
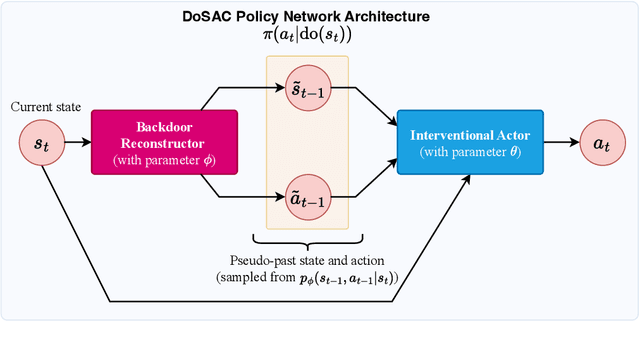

Hidden confounders that influence both states and actions can bias policy learning in reinforcement learning (RL), leading to suboptimal or non-generalizable behavior. Most RL algorithms ignore this issue, learning policies from observational trajectories based solely on statistical associations rather than causal effects. We propose DoSAC (Do-Calculus Soft Actor-Critic with Backdoor Adjustment), a principled extension of the SAC algorithm that corrects for hidden confounding via causal intervention estimation. DoSAC estimates the interventional policy $\pi(a | \mathrm{do}(s))$ using the backdoor criterion, without requiring access to true confounders or causal labels. To achieve this, we introduce a learnable Backdoor Reconstructor that infers pseudo-past variables (previous state and action) from the current state to enable backdoor adjustment from observational data. This module is integrated into a soft actor-critic framework to compute both the interventional policy and its entropy. Empirical results on continuous control benchmarks show that DoSAC outperforms baselines under confounded settings, with improved robustness, generalization, and policy reliability.
JEDI: Latent End-to-end Diffusion Mitigates Agent-Human Performance Asymmetry in Model-Based Reinforcement Learning
May 26, 2025Recent advances in model-based reinforcement learning (MBRL) have achieved super-human level performance on the Atari100k benchmark, driven by reinforcement learning agents trained on powerful diffusion world models. However, we identify that the current aggregates mask a major performance asymmetry: MBRL agents dramatically outperform humans in some tasks despite drastically underperforming in others, with the former inflating the aggregate metrics. This is especially pronounced in pixel-based agents trained with diffusion world models. In this work, we address the pronounced asymmetry observed in pixel-based agents as an initial attempt to reverse the worrying upward trend observed in them. We address the problematic aggregates by delineating all tasks as Agent-Optimal or Human-Optimal and advocate for equal importance on metrics from both sets. Next, we hypothesize this pronounced asymmetry is due to the lack of temporally-structured latent space trained with the World Model objective in pixel-based methods. Lastly, to address this issue, we propose Joint Embedding DIffusion (JEDI), a novel latent diffusion world model trained end-to-end with the self-consistency objective. JEDI outperforms SOTA models in human-optimal tasks while staying competitive across the Atari100k benchmark, and runs 3 times faster with 43% lower memory than the latest pixel-based diffusion baseline. Overall, our work rethinks what it truly means to cross human-level performance in Atari100k.
Knowledge Sharing and Transfer via Centralized Reward Agent for Multi-Task Reinforcement Learning
Aug 20, 2024Reward shaping is effective in addressing the sparse-reward challenge in reinforcement learning by providing immediate feedback through auxiliary informative rewards. Based on the reward shaping strategy, we propose a novel multi-task reinforcement learning framework, that integrates a centralized reward agent (CRA) and multiple distributed policy agents. The CRA functions as a knowledge pool, which aims to distill knowledge from various tasks and distribute it to individual policy agents to improve learning efficiency. Specifically, the shaped rewards serve as a straightforward metric to encode knowledge. This framework not only enhances knowledge sharing across established tasks but also adapts to new tasks by transferring valuable reward signals. We validate the proposed method on both discrete and continuous domains, demonstrating its robustness in multi-task sparse-reward settings and its effective transferability to unseen tasks.
Highly Efficient Self-Adaptive Reward Shaping for Reinforcement Learning
Aug 07, 2024Reward shaping addresses the challenge of sparse rewards in reinforcement learning by constructing denser and more informative reward signals. To achieve self-adaptive and highly efficient reward shaping, we propose a novel method that incorporates success rates derived from historical experiences into shaped rewards. Our approach utilizes success rates sampled from Beta distributions, which dynamically evolve from uncertain to reliable values as more data is collected. Initially, the self-adaptive success rates exhibit more randomness to encourage exploration. Over time, they become more certain to enhance exploitation, thus achieving a better balance between exploration and exploitation. We employ Kernel Density Estimation (KDE) combined with Random Fourier Features (RFF) to derive the Beta distributions, resulting in a computationally efficient implementation in high-dimensional continuous state spaces. This method provides a non-parametric and learning-free approach. The proposed method is evaluated on a wide range of continuous control tasks with sparse and delayed rewards, demonstrating significant improvements in sample efficiency and convergence stability compared to relevant baselines.
Decoupled Prompt-Adapter Tuning for Continual Activity Recognition
Jul 20, 2024



Action recognition technology plays a vital role in enhancing security through surveillance systems, enabling better patient monitoring in healthcare, providing in-depth performance analysis in sports, and facilitating seamless human-AI collaboration in domains such as manufacturing and assistive technologies. The dynamic nature of data in these areas underscores the need for models that can continuously adapt to new video data without losing previously acquired knowledge, highlighting the critical role of advanced continual action recognition. To address these challenges, we propose Decoupled Prompt-Adapter Tuning (DPAT), a novel framework that integrates adapters for capturing spatial-temporal information and learnable prompts for mitigating catastrophic forgetting through a decoupled training strategy. DPAT uniquely balances the generalization benefits of prompt tuning with the plasticity provided by adapters in pretrained vision models, effectively addressing the challenge of maintaining model performance amidst continuous data evolution without necessitating extensive finetuning. DPAT consistently achieves state-of-the-art performance across several challenging action recognition benchmarks, thus demonstrating the effectiveness of our model in the domain of continual action recognition.
Federated Learning of Causal Effects from Incomplete Observational Data
Aug 24, 2023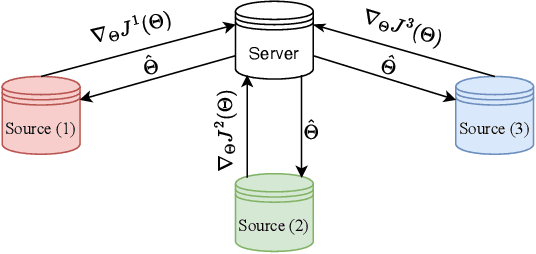
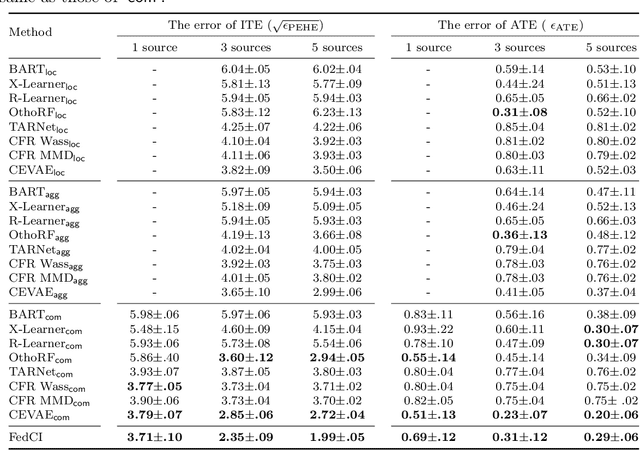
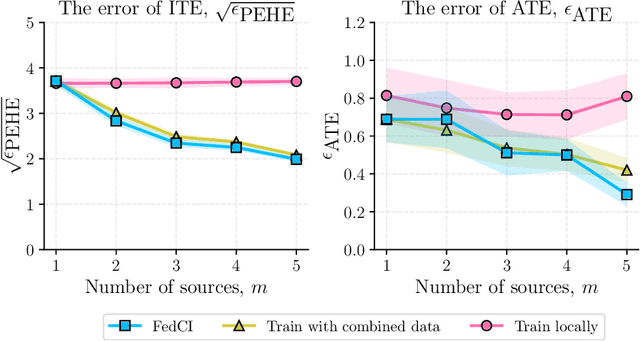
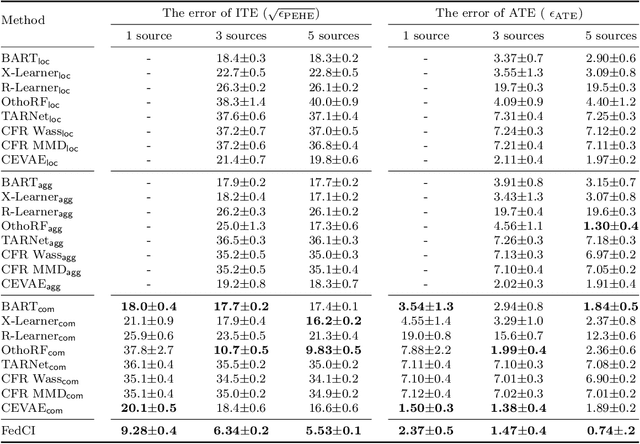
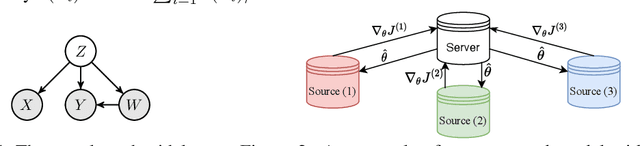
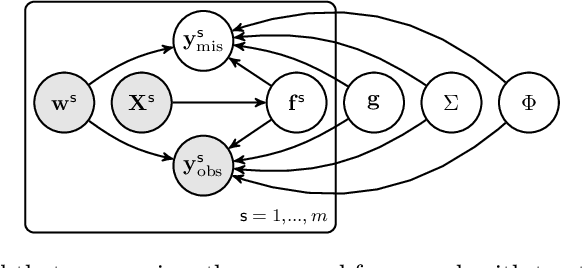
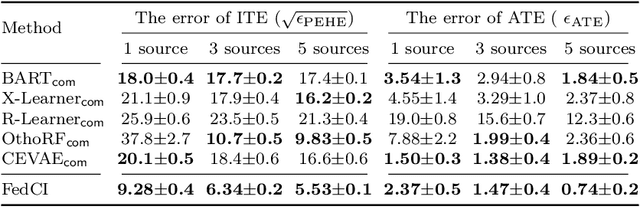
Decentralized and incomplete data sources are prevalent in real-world applications, posing a formidable challenge for causal inference. These sources cannot be consolidated into a single entity owing to privacy constraints, and the presence of missing values within them can potentially introduce bias to the causal estimands. We introduce a new approach for federated causal inference from incomplete data, enabling the estimation of causal effects from multiple decentralized and incomplete data sources. Our approach disentangles the loss function into multiple components, each corresponding to a specific data source with missing values. Our approach accounts for the missing data under the missing at random assumption, while also estimating higher-order statistics of the causal estimands. Our method recovers the conditional distribution of missing confounders given the observed confounders from the decentralized data sources to identify causal effects. Our framework estimates heterogeneous causal effects without the sharing of raw training data among sources, which helps to mitigate privacy risks. The efficacy of our approach is demonstrated through a collection of simulated and real-world instances, illustrating its potential and practicality.
An Adaptive Kernel Approach to Federated Learning of Heterogeneous Causal Effects
Jan 01, 2023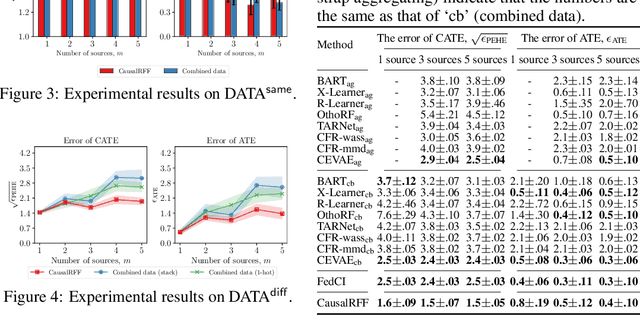
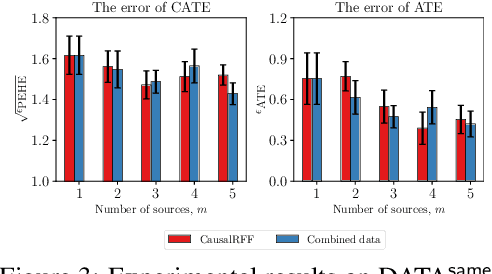
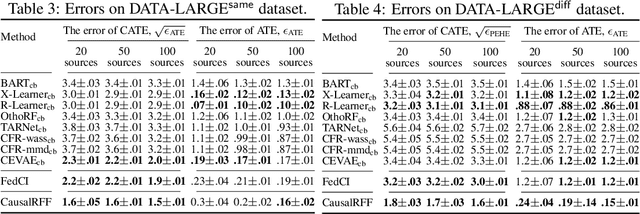
We propose a new causal inference framework to learn causal effects from multiple, decentralized data sources in a federated setting. We introduce an adaptive transfer algorithm that learns the similarities among the data sources by utilizing Random Fourier Features to disentangle the loss function into multiple components, each of which is associated with a data source. The data sources may have different distributions; the causal effects are independently and systematically incorporated. The proposed method estimates the similarities among the sources through transfer coefficients, and hence requiring no prior information about the similarity measures. The heterogeneous causal effects can be estimated with no sharing of the raw training data among the sources, thus minimizing the risk of privacy leak. We also provide minimax lower bounds to assess the quality of the parameters learned from the disparate sources. The proposed method is empirically shown to outperform the baselines on decentralized data sources with dissimilar distributions.
Adaptive Multi-Source Causal Inference
May 31, 2021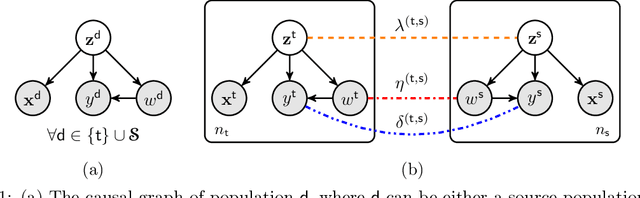
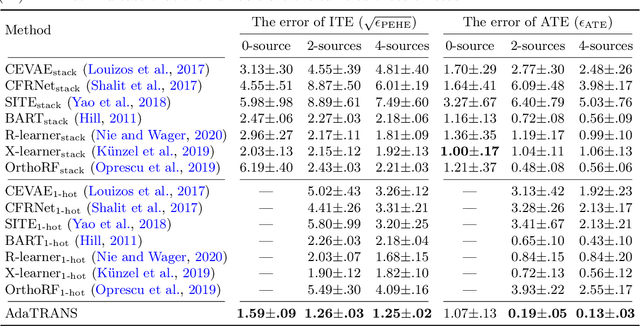
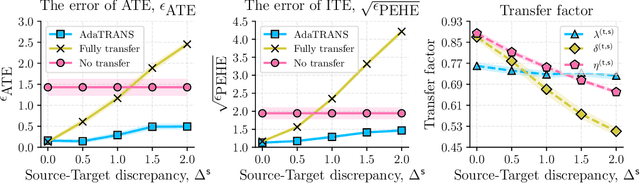
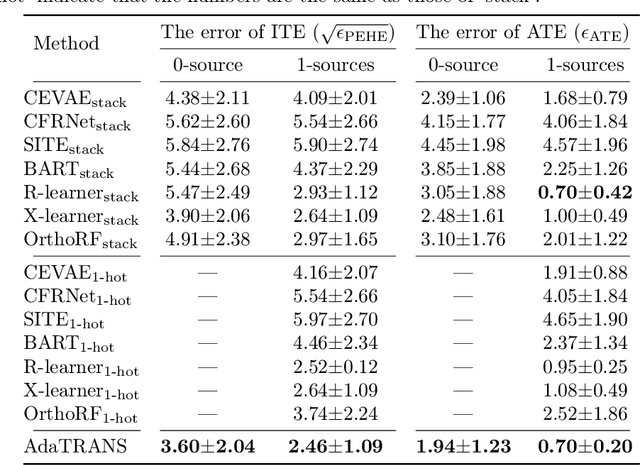
Data scarcity is a tremendous challenge in causal effect estimation. In this paper, we propose to exploit additional data sources to facilitate estimating causal effects in the target population. Specifically, we leverage additional source datasets which share similar causal mechanisms with the target observations to help infer causal effects of the target population. We propose three levels of knowledge transfer, through modelling the outcomes, treatments, and confounders. To achieve consistent positive transfer, we introduce learnable parametric transfer factors to adaptively control the transfer strength, and thus achieving a fair and balanced knowledge transfer between the sources and the target. The proposed method can infer causal effects in the target population without prior knowledge of data discrepancy between the additional data sources and the target. Experiments on both synthetic and real-world datasets show the effectiveness of the proposed method as compared with recent baselines.
Federated Estimation of Causal Effects from Observational Data
May 31, 2021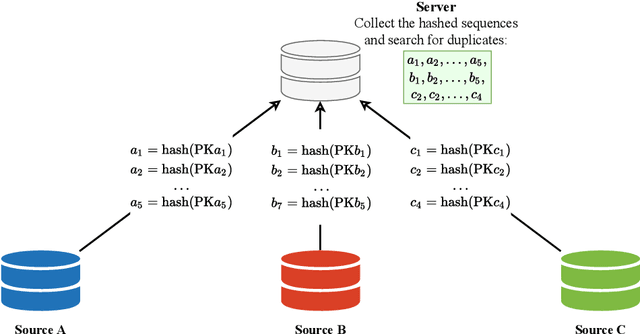
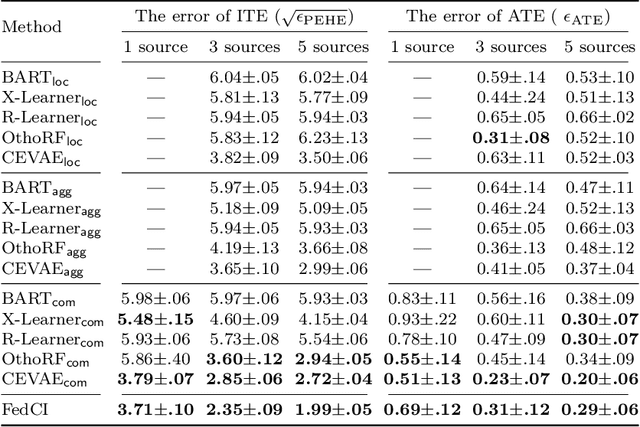
Many modern applications collect data that comes in federated spirit, with data kept locally and undisclosed. Till date, most insight into the causal inference requires data to be stored in a central repository. We present a novel framework for causal inference with federated data sources. We assess and integrate local causal effects from different private data sources without centralizing them. Then, the treatment effects on subjects from observational data using a non-parametric reformulation of the classical potential outcomes framework is estimated. We model the potential outcomes as a random function distributed by Gaussian processes, whose defining parameters can be efficiently learned from multiple data sources, respecting privacy constraints. We demonstrate the promise and efficiency of the proposed approach through a set of simulated and real-world benchmark examples.