 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Stabilized Hybrid Active Noise Control Algorithm of GFANC and FxNLMS with Online Clustering
Jan 22, 2026The Filtered-x Normalized Least Mean Square (FxNLMS) algorithm suffers from slow convergence and a risk of divergence, although it can achieve low steady-state errors after sufficient adaptation. In contrast, the Generative Fixed-Filter Active Noise Control (GFANC) method offers fast response speed, but its lack of adaptability may lead to large steady-state errors. This paper proposes a hybrid GFANC-FxNLMS algorithm to leverage the complementary advantages of both approaches. In the hybrid GFANC-FxNLMS algorithm, GFANC provides a frame-level control filter as an initialization for FxNLMS, while FxNLMS performs continuous adaptation at the sampling rate. Small variations in the GFANC-generated filter may repeatedly reinitialize FxNLMS, interrupting its adaptation process and destabilizing the system. An online clustering module is introduced to avoid unnecessary re-initializations and improve system stability. Simulation results show that the proposed algorithm achieves fast response, very low steady-state error, and high stability, requiring only one pre-trained broadband filter.
Co-Initialization of Control Filter and Secondary Path via Meta-Learning for Active Noise Control
Jan 20, 2026Active noise control (ANC) must adapt quickly when the acoustic environment changes, yet early performance is largely dictated by initialization. We address this with a Model-Agnostic Meta-Learning (MAML) co-initialization that jointly sets the control filter and the secondary-path model for FxLMS-based ANC while keeping the runtime algorithm unchanged. The initializer is pre-trained on a small set of measured paths using short two-phase inner loops that mimic identification followed by residual-noise reduction, and is applied by simply setting the learned initial coefficients. In an online secondary path modeling FxLMS testbed, it yields lower early-stage error, shorter time-to-target, reduced auxiliary-noise energy, and faster recovery after path changes than a baseline without re-initialization. The method provides a simple fast start for feedforward ANC under environment changes, requiring a small set of paths to pre-train.
Directional Selective Fixed-Filter Active Noise Control Based on a Convolutional Neural Network in Reverberant Environments
Jan 11, 2026Selective fixed-filter active noise control (SFANC) is a novel approach capable of mitigating noise with varying frequency characteristics. It offers faster response and greater computational efficiency compared to traditional adaptive algorithms. However, spatial factors, particularly the influence of the noise source location, are often overlooked. Some existing studies have explored the impact of the direction-of-arrival (DoA) of the noise source on ANC performance, but they are mostly limited to free-field conditions and do not consider the more complex indoor reverberant environments. To address this gap, this paper proposes a learning-based directional SFANC method that incorporates the DoA of the noise source in reverberant environments. In this framework, multiple reference signals are processed by a convolutional neural network (CNN) to estimate the azimuth and elevation angles of the noise source, as well as to identify the most appropriate control filter for effective noise cancellation. Compared to traditional adaptive algorithms, the proposed approach achieves superior noise reduction with shorter response times, even in the presence of reverberations.
DOA Estimation with Lightweight Network on LLM-Aided Simulated Acoustic Scenes
Nov 11, 2025Direction-of-Arrival (DOA) estimation is critical in spatial audio and acoustic signal processing, with wide-ranging applications in real-world. Most existing DOA models are trained on synthetic data by convolving clean speech with room impulse responses (RIRs), which limits their generalizability due to constrained acoustic diversity. In this paper, we revisit DOA estimation using a recently introduced dataset constructed with the assistance of large language models (LLMs), which provides more realistic and diverse spatial audio scenes. We benchmark several representative neural-based DOA methods on this dataset and propose LightDOA, a lightweight DOA estimation model based on depthwise separable convolutions, specifically designed for mutil-channel input in varying environments. Experimental results show that LightDOA achieves satisfactory accuracy and robustness across various acoustic scenes while maintaining low computational complexity. This study not only highlights the potential of spatial audio synthesized with the assistance of LLMs in advancing robust and efficient DOA estimation research, but also highlights LightDOA as efficient solution for resource-constrained applications.
Self-Boosted Weight-Constrained FxLMS: A Robustness Distributed Active Noise Control Algorithm Without Internode Communication
Jul 16, 2025Compared to the conventional centralized multichannel active noise control (MCANC) algorithm, which requires substantial computational resources, decentralized approaches exhibit higher computational efficiency but typically result in inferior noise reduction performance. To enhance performance, distributed ANC methods have been introduced, enabling information exchange among ANC nodes; however, the resulting communication latency often compromises system stability. To overcome these limitations, we propose a self-boosted weight-constrained filtered-reference least mean square (SB-WCFxLMS) algorithm for the distributed MCANC system without internode communication. The WCFxLMS algorithm is specifically designed to mitigate divergence issues caused by the internode cross-talk effect. The self-boosted strategy lets each ANC node independently adapt its constraint parameters based on its local noise reduction performance, thus ensuring effective noise cancellation without the need for inter-node communication. With the assistance of this mechanism, this approach significantly reduces both computational complexity and communication overhead. Numerical simulations employing real acoustic paths and compressor noise validate the effectiveness and robustness of the proposed system. The results demonstrate that our proposed method achieves satisfactory noise cancellation performance with minimal resource requirements.
Exploration by Random Reward Perturbation
Jun 10, 2025We introduce Random Reward Perturbation (RRP), a novel exploration strategy for reinforcement learning (RL). Our theoretical analyses demonstrate that adding zero-mean noise to environmental rewards effectively enhances policy diversity during training, thereby expanding the range of exploration. RRP is fully compatible with the action-perturbation-based exploration strategies, such as $\epsilon$-greedy, stochastic policies, and entropy regularization, providing additive improvements to exploration effects. It is general, lightweight, and can be integrated into existing RL algorithms with minimal implementation effort and negligible computational overhead. RRP establishes a theoretical connection between reward shaping and noise-driven exploration, highlighting their complementary potential. Experiments show that RRP significantly boosts the performance of Proximal Policy Optimization and Soft Actor-Critic, achieving higher sample efficiency and escaping local optima across various tasks, under both sparse and dense reward scenarios.
Preventing output saturation in active noise control: An output-constrained Kalman filter approach
Dec 25, 2024The Kalman filter (KF)-based active noise control (ANC) system demonstrates superior tracking and faster convergence compared to the least mean square (LMS) method, particularly in dynamic noise cancellation scenarios. However, in environments with extremely high noise levels, the power of the control signal can exceed the system's rated output power due to hardware limitations, leading to output saturation and subsequent non-linearity. To mitigate this issue, a modified KF with an output constraint is proposed. In this approach, the disturbance treated as an measurement is re-scaled by a constraint factor, which is determined by the system's rated power, the secondary path gain, and the disturbance power. As a result, the output power of the system, i.e. the control signal, is indirectly constrained within the maximum output of the system, ensuring stability. Simulation results indicate that the proposed algorithm not only achieves rapid suppression of dynamic noise but also effectively prevents non-linearity due to output saturation, highlighting its practical significance.
Transferable Selective Virtual Sensing Active Noise Control Technique Based on Metric Learning
Sep 09, 2024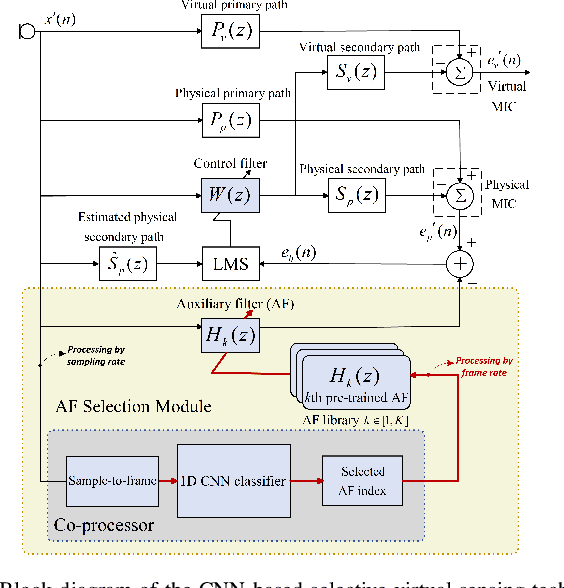
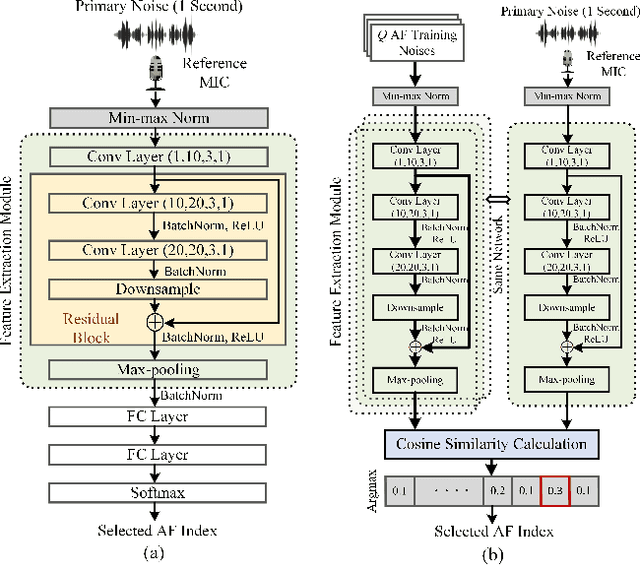
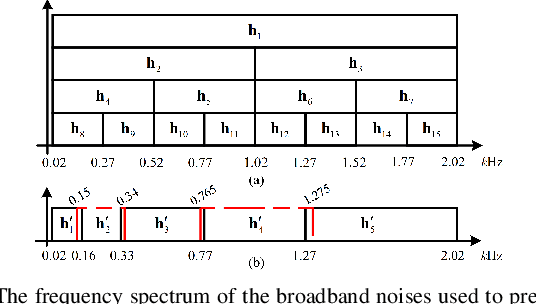
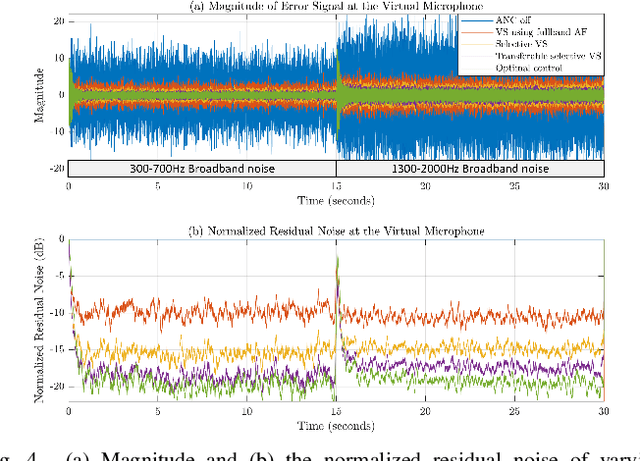
Virtual sensing (VS) technology enables active noise control (ANC) systems to attenuate noise at virtual locations distant from the physical error microphones. Appropriate auxiliary filters (AF) can significantly enhance the effectiveness of VS approaches. The selection of appropriate AF for various types of noise can be automatically achieved using convolutional neural networks (CNNs). However, training the CNN model for different ANC systems is often labour-intensive and time-consuming. To tackle this problem, we propose a novel method, Transferable Selective VS, by integrating metric-learning technology into CNN-based VS approaches. The Transferable Selective VS method allows a pre-trained CNN to be applied directly to new ANC systems without requiring retraining, and it can handle unseen noise types. Numerical simulations demonstrate the effectiveness of the proposed method in attenuating sudden-varying broadband noises and real-world noises.
Knowledge Sharing and Transfer via Centralized Reward Agent for Multi-Task Reinforcement Learning
Aug 20, 2024Reward shaping is effective in addressing the sparse-reward challenge in reinforcement learning by providing immediate feedback through auxiliary informative rewards. Based on the reward shaping strategy, we propose a novel multi-task reinforcement learning framework, that integrates a centralized reward agent (CRA) and multiple distributed policy agents. The CRA functions as a knowledge pool, which aims to distill knowledge from various tasks and distribute it to individual policy agents to improve learning efficiency. Specifically, the shaped rewards serve as a straightforward metric to encode knowledge. This framework not only enhances knowledge sharing across established tasks but also adapts to new tasks by transferring valuable reward signals. We validate the proposed method on both discrete and continuous domains, demonstrating its robustness in multi-task sparse-reward settings and its effective transferability to unseen tasks.
Highly Efficient Self-Adaptive Reward Shaping for Reinforcement Learning
Aug 07, 2024Reward shaping addresses the challenge of sparse rewards in reinforcement learning by constructing denser and more informative reward signals. To achieve self-adaptive and highly efficient reward shaping, we propose a novel method that incorporates success rates derived from historical experiences into shaped rewards. Our approach utilizes success rates sampled from Beta distributions, which dynamically evolve from uncertain to reliable values as more data is collected. Initially, the self-adaptive success rates exhibit more randomness to encourage exploration. Over time, they become more certain to enhance exploitation, thus achieving a better balance between exploration and exploitation. We employ Kernel Density Estimation (KDE) combined with Random Fourier Features (RFF) to derive the Beta distributions, resulting in a computationally efficient implementation in high-dimensional continuous state spaces. This method provides a non-parametric and learning-free approach. The proposed method is evaluated on a wide range of continuous control tasks with sparse and delayed rewards, demonstrating significant improvements in sample efficiency and convergence stability compared to relevant baselines.