 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImLoc: Revisiting Visual Localization with Image-based Representation
Jan 07, 2026Existing visual localization methods are typically either 2D image-based, which are easy to build and maintain but limited in effective geometric reasoning, or 3D structure-based, which achieve high accuracy but require a centralized reconstruction and are difficult to update. In this work, we revisit visual localization with a 2D image-based representation and propose to augment each image with estimated depth maps to capture the geometric structure. Supported by the effective use of dense matchers, this representation is not only easy to build and maintain, but achieves highest accuracy in challenging conditions. With compact compression and a GPU-accelerated LO-RANSAC implementation, the whole pipeline is efficient in both storage and computation and allows for a flexible trade-off between accuracy and highest memory efficiency. Our method achieves a new state-of-the-art accuracy on various standard benchmarks and outperforms existing memory-efficient methods at comparable map sizes. Code will be available at https://github.com/cvg/Hierarchical-Localization.
R-SCoRe: Revisiting Scene Coordinate Regression for Robust Large-Scale Visual Localization
Jan 02, 2025



Learning-based visual localization methods that use scene coordinate regression (SCR) offer the advantage of smaller map sizes. However, on datasets with complex illumination changes or image-level ambiguities, it remains a less robust alternative to feature matching methods. This work aims to close the gap. We introduce a covisibility graph-based global encoding learning and data augmentation strategy, along with a depth-adjusted reprojection loss to facilitate implicit triangulation. Additionally, we revisit the network architecture and local feature extraction module. Our method achieves state-of-the-art on challenging large-scale datasets without relying on network ensembles or 3D supervision. On Aachen Day-Night, we are 10$\times$ more accurate than previous SCR methods with similar map sizes and require at least 5$\times$ smaller map sizes than any other SCR method while still delivering superior accuracy. Code will be available at: https://github.com/cvg/scrstudio .
GLACE: Global Local Accelerated Coordinate Encoding
Jun 06, 2024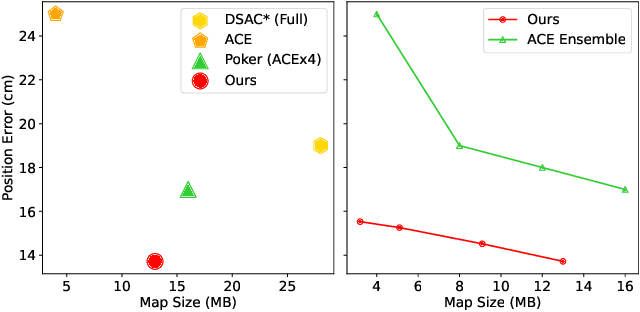
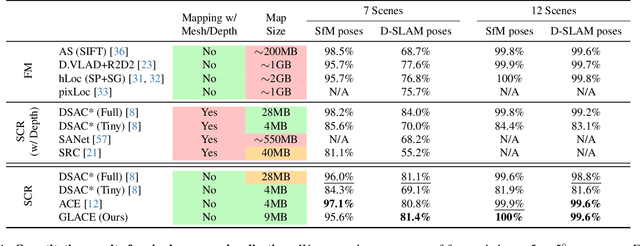
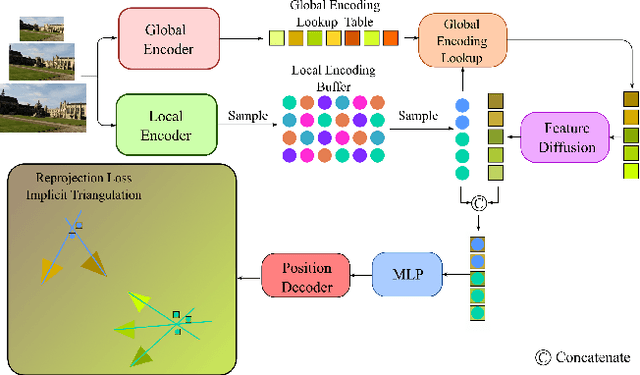
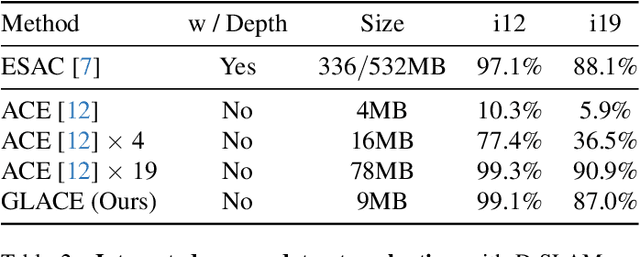
Scene coordinate regression (SCR) methods are a family of visual localization methods that directly regress 2D-3D matches for camera pose estimation. They are effective in small-scale scenes but face significant challenges in large-scale scenes that are further amplified in the absence of ground truth 3D point clouds for supervision. Here, the model can only rely on reprojection constraints and needs to implicitly triangulate the points. The challenges stem from a fundamental dilemma: The network has to be invariant to observations of the same landmark at different viewpoints and lighting conditions, etc., but at the same time discriminate unrelated but similar observations. The latter becomes more relevant and severe in larger scenes. In this work, we tackle this problem by introducing the concept of co-visibility to the network. We propose GLACE, which integrates pre-trained global and local encodings and enables SCR to scale to large scenes with only a single small-sized network. Specifically, we propose a novel feature diffusion technique that implicitly groups the reprojection constraints with co-visibility and avoids overfitting to trivial solutions. Additionally, our position decoder parameterizes the output positions for large-scale scenes more effectively. Without using 3D models or depth maps for supervision, our method achieves state-of-the-art results on large-scale scenes with a low-map-size model. On Cambridge landmarks, with a single model, we achieve 17% lower median position error than Poker, the ensemble variant of the state-of-the-art SCR method ACE. Code is available at: https://github.com/cvg/glace.
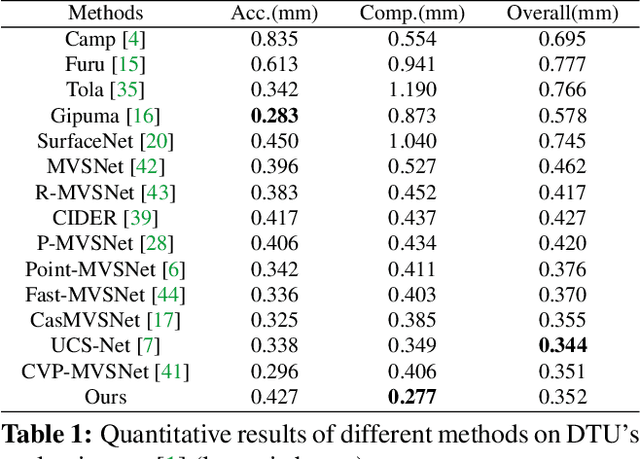
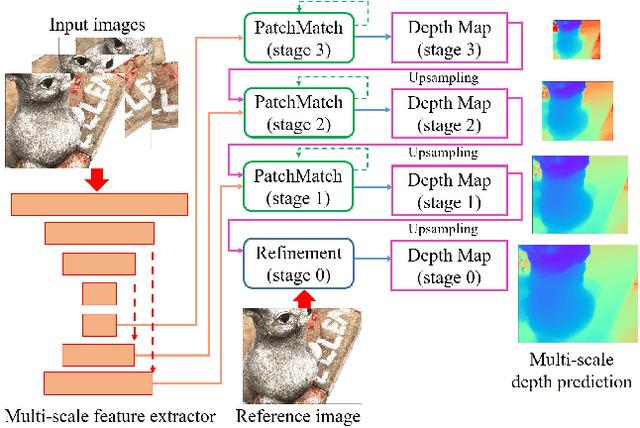
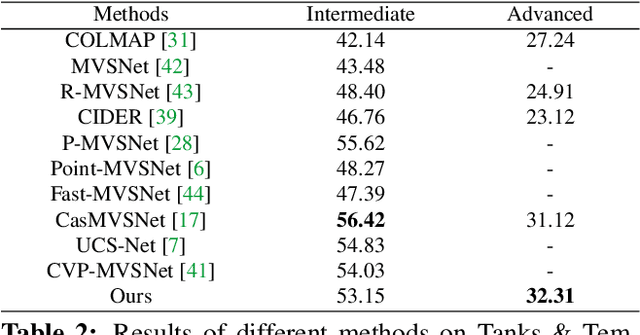
IterMVS: Iterative Probability Estimation for Efficient Multi-View Stereo
Dec 09, 2021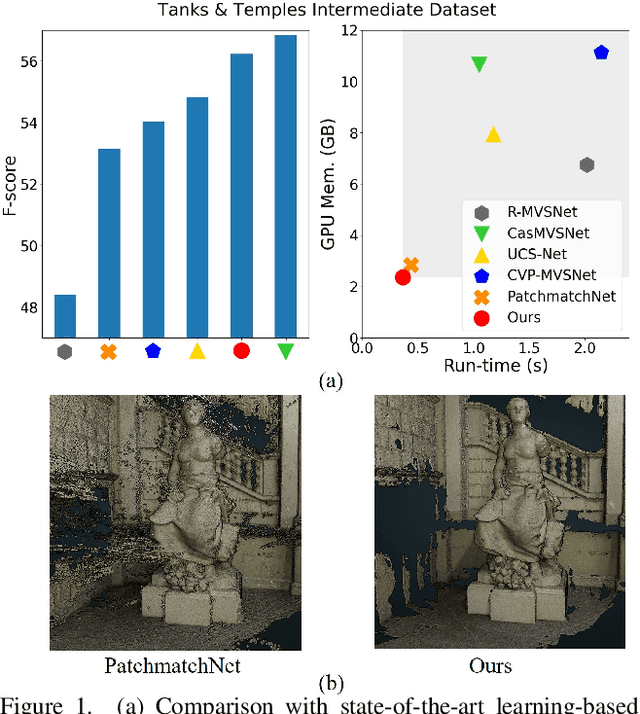
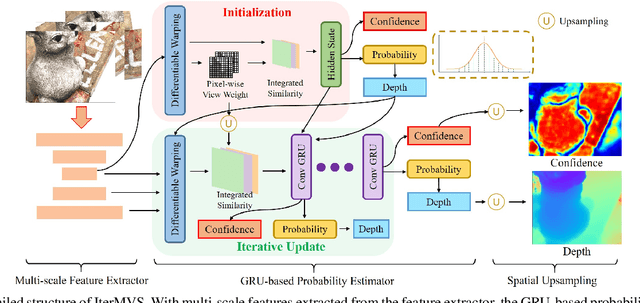
We present IterMVS, a new data-driven method for high-resolution multi-view stereo. We propose a novel GRU-based estimator that encodes pixel-wise probability distributions of depth in its hidden state. Ingesting multi-scale matching information, our model refines these distributions over multiple iterations and infers depth and confidence. To extract the depth maps, we combine traditional classification and regression in a novel manner. We verify the efficiency and effectiveness of our method on DTU, Tanks&Temples and ETH3D. While being the most efficient method in both memory and run-time, our model achieves competitive performance on DTU and better generalization ability on Tanks&Temples as well as ETH3D than most state-of-the-art methods. Code is available at https://github.com/FangjinhuaWang/IterMVS.
DeepVideoMVS: Multi-View Stereo on Video with Recurrent Spatio-Temporal Fusion
Dec 03, 2020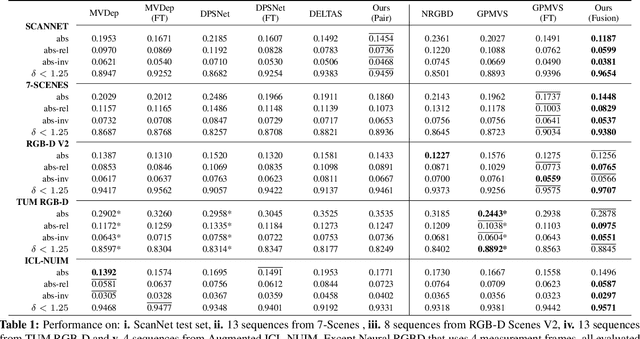
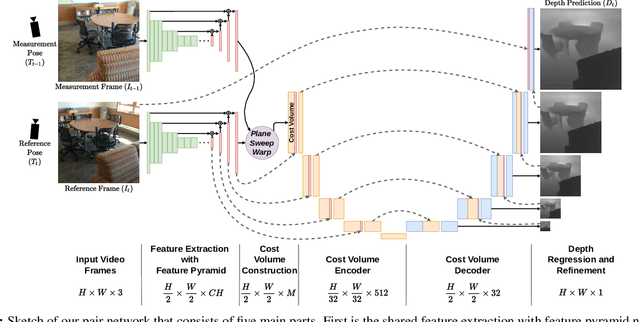
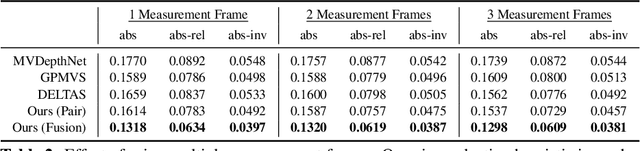
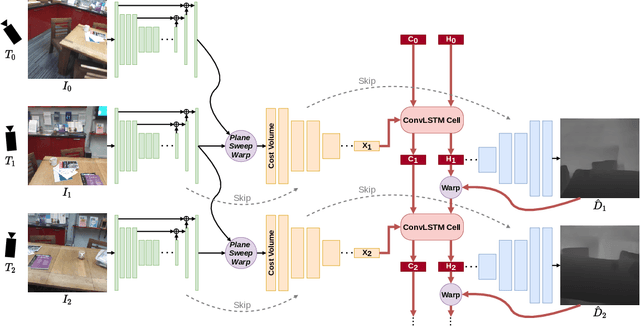
We propose an online multi-view depth prediction approach on posed video streams, where the scene geometry information computed in the previous time steps is propagated to the current time step in an efficient and geometrically plausible way. The backbone of our approach is a real-time capable, lightweight encoder-decoder that relies on cost volumes computed from pairs of images. We extend it by placing a ConvLSTM cell at the bottleneck layer, which compresses an arbitrary amount of past information in its states. The novelty lies in propagating the hidden state of the cell by accounting for the viewpoint changes between time steps. At a given time step, we warp the previous hidden state into the current camera plane using the previous depth prediction. Our extension brings only a small overhead of computation time and memory consumption, while improving the depth predictions significantly. As a result, we outperform the existing state-of-the-art multi-view stereo methods on most of the evaluated metrics in hundreds of indoor scenes while maintaining a real-time performance. Code available: https://github.com/ardaduz/deep-video-mvs
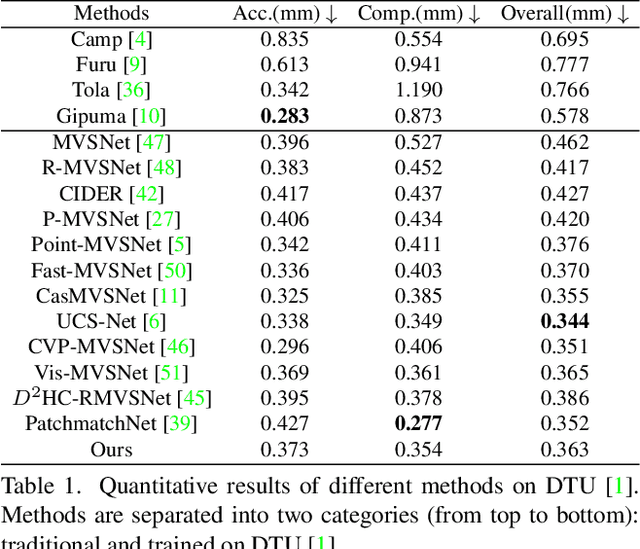
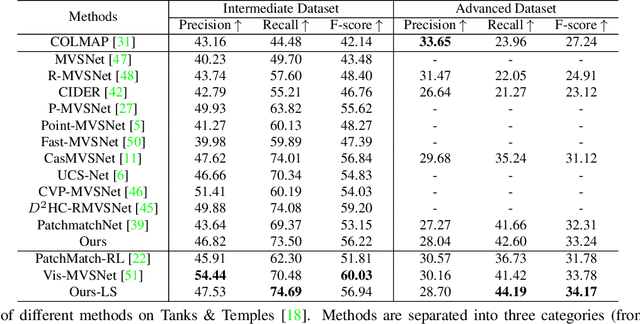
PatchmatchNet: Learned Multi-View Patchmatch Stereo
Dec 02, 2020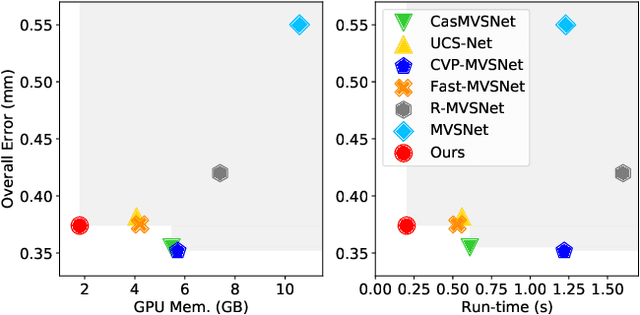
We present PatchmatchNet, a novel and learnable cascade formulation of Patchmatch for high-resolution multi-view stereo. With high computation speed and low memory requirement, PatchmatchNet can process higher resolution imagery and is more suited to run on resource limited devices than competitors that employ 3D cost volume regularization. For the first time we introduce an iterative multi-scale Patchmatch in an end-to-end trainable architecture and improve the Patchmatch core algorithm with a novel and learned adaptive propagation and evaluation scheme for each iteration. Extensive experiments show a very competitive performance and generalization for our method on DTU, Tanks & Temples and ETH3D, but at a significantly higher efficiency than all existing top-performing models: at least two and a half times faster than state-of-the-art methods with twice less memory usage.
HoloLens 2 Research Mode as a Tool for Computer Vision Research
Aug 25, 2020
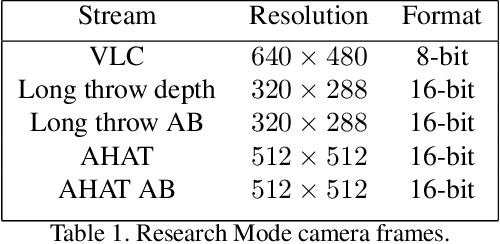
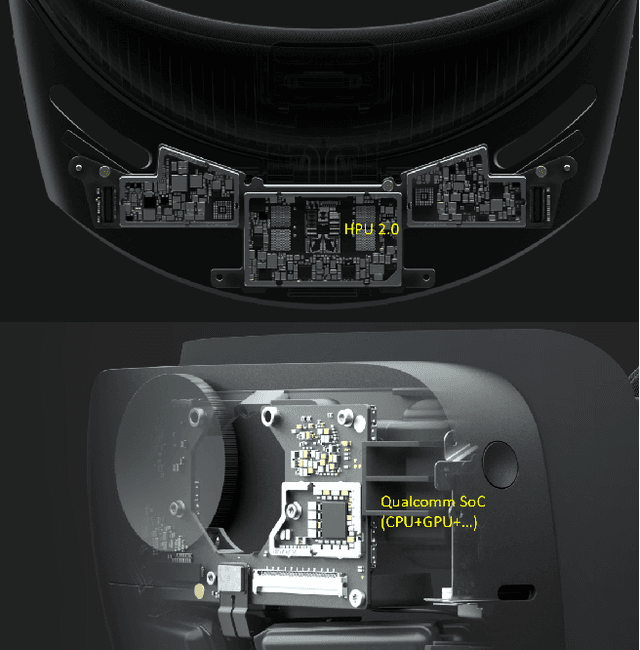

Mixed reality headsets, such as the Microsoft HoloLens 2, are powerful sensing devices with integrated compute capabilities, which makes it an ideal platform for computer vision research. In this technical report, we present HoloLens 2 Research Mode, an API and a set of tools enabling access to the raw sensor streams. We provide an overview of the API and explain how it can be used to build mixed reality applications based on processing sensor data. We also show how to combine the Research Mode sensor data with the built-in eye and hand tracking capabilities provided by HoloLens 2. By releasing the Research Mode API and a set of open-source tools, we aim to foster further research in the fields of computer vision as well as robotics and encourage contributions from the research community.
Super-resolution of Sentinel-2 images: Learning a globally applicable deep neural network
Oct 01, 2018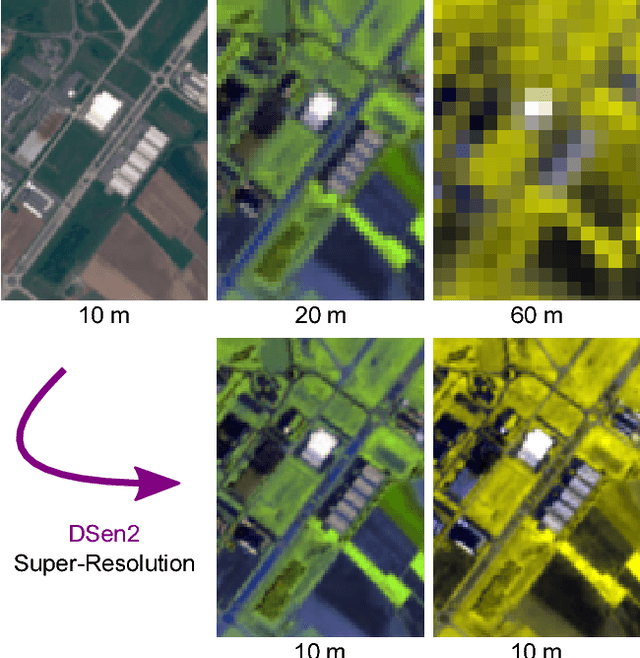


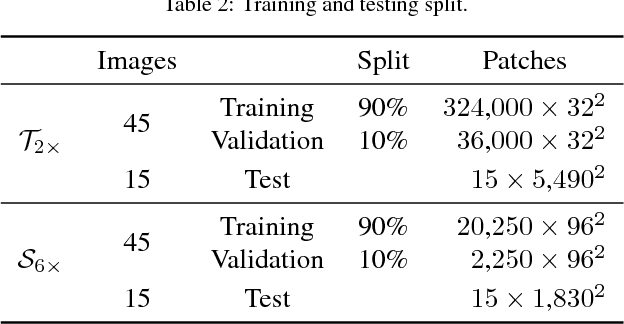
The Sentinel-2 satellite mission delivers multi-spectral imagery with 13 spectral bands, acquired at three different spatial resolutions. The aim of this research is to super-resolve the lower-resolution (20 m and 60 m Ground Sampling Distance - GSD) bands to 10 m GSD, so as to obtain a complete data cube at the maximal sensor resolution. We employ a state-of-the-art convolutional neural network (CNN) to perform end-to-end upsampling, which is trained with data at lower resolution, i.e., from 40->20 m, respectively 360->60 m GSD. In this way, one has access to a virtually infinite amount of training data, by downsampling real Sentinel-2 images. We use data sampled globally over a wide range of geographical locations, to obtain a network that generalises across different climate zones and land-cover types, and can super-resolve arbitrary Sentinel-2 images without the need of retraining. In quantitative evaluations (at lower scale, where ground truth is available), our network, which we call DSen2, outperforms the best competing approach by almost 50% in RMSE, while better preserving the spectral characteristics. It also delivers visually convincing results at the full 10 m GSD. The code is available at https://github.com/lanha/DSen2
* 19 pages, 11 figures
Inference, Learning and Attention Mechanisms that Exploit and Preserve Sparsity in Convolutional Networks
Feb 09, 2018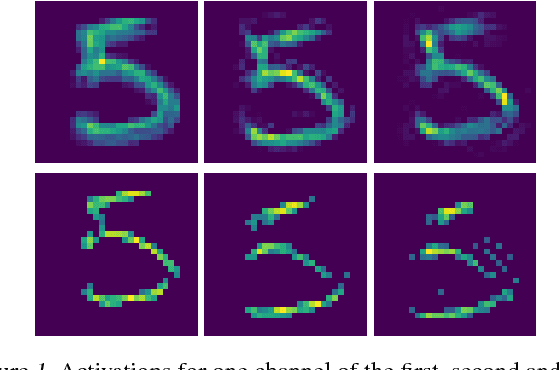
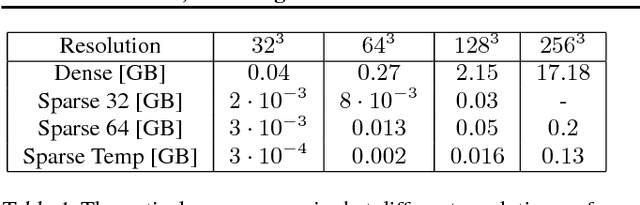
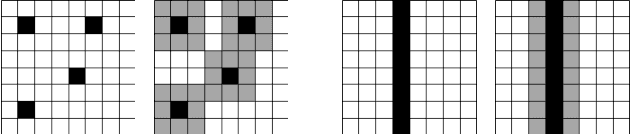
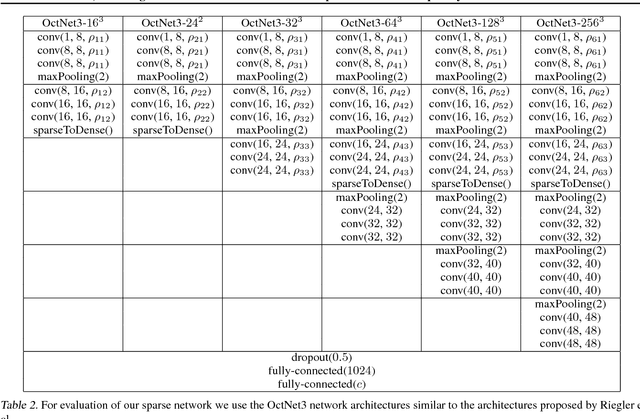
While CNNs naturally lend themselves to densely sampled data, and sophisticated implementations are available, they lack the ability to efficiently process sparse data. In this work we introduce a suite of tools that exploit sparsity in both the feature maps and the filter weights, and thereby allow for significantly lower memory footprints and computation times than the conventional dense framework when processing data with a high degree of sparsity. Our scheme provides (i) an efficient GPU implementation of a convolution layer based on direct, sparse convolution; (ii) a filter step within the convolution layer, which we call attention, that prevents fill-in, i.e., the tendency of convolution to rapidly decrease sparsity, and guarantees an upper bound on the computational resources; and (iii) an adaptation of the back-propagation algorithm, which makes it possible to combine our approach with standard learning frameworks, while still exploiting sparsity in the data and the model.
Classification With an Edge: Improving Semantic Image Segmentation with Boundary Detection
Dec 21, 2017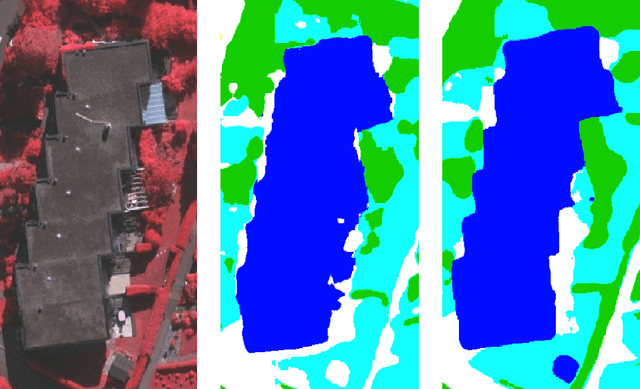
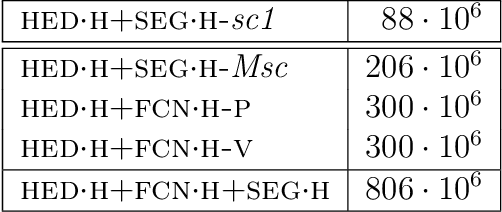
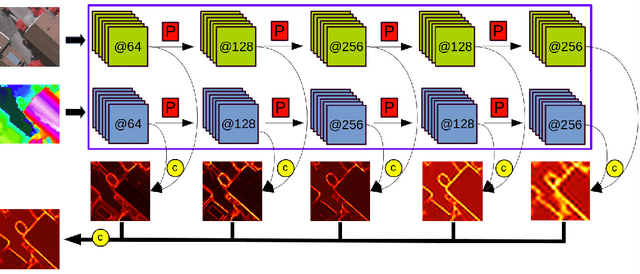
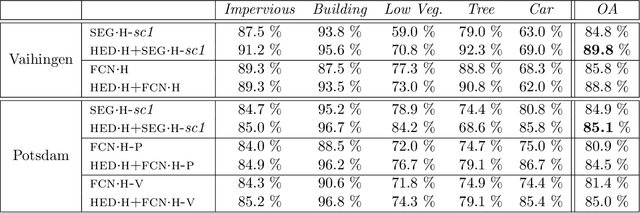
We present an end-to-end trainable deep convolutional neural network (DCNN) for semantic segmentation with built-in awareness of semantically meaningful boundaries. Semantic segmentation is a fundamental remote sensing task, and most state-of-the-art methods rely on DCNNs as their workhorse. A major reason for their success is that deep networks learn to accumulate contextual information over very large windows (receptive fields). However, this success comes at a cost, since the associated loss of effecive spatial resolution washes out high-frequency details and leads to blurry object boundaries. Here, we propose to counter this effect by combining semantic segmentation with semantically informed edge detection, thus making class-boundaries explicit in the model, First, we construct a comparatively simple, memory-efficient model by adding boundary detection to the Segnet encoder-decoder architecture. Second, we also include boundary detection in FCN-type models and set up a high-end classifier ensemble. We show that boundary detection significantly improves semantic segmentation with CNNs. Our high-end ensemble achieves > 90% overall accuracy on the ISPRS Vaihingen benchmark.