 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProgressive Structure from Motion
Jul 10, 2018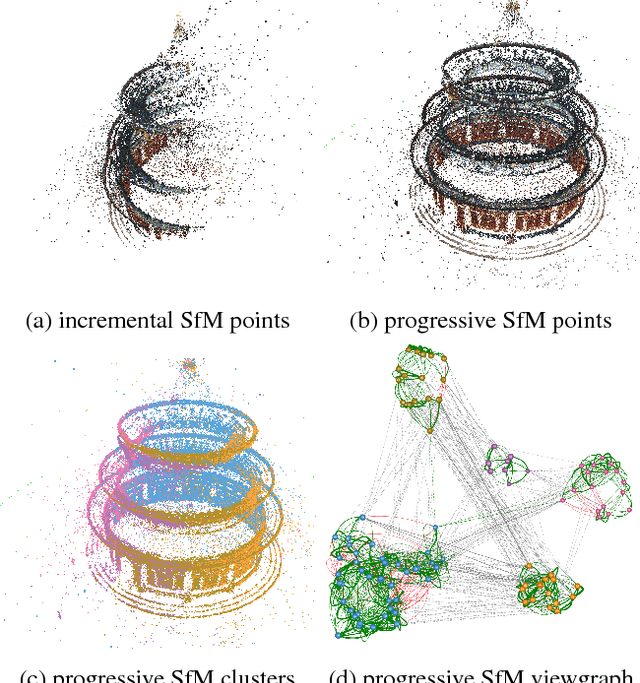
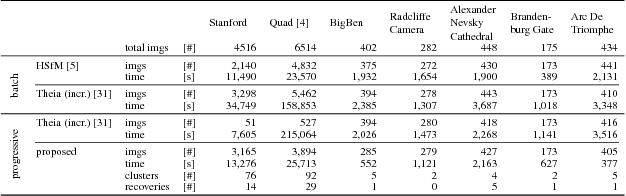


Structure from Motion or the sparse 3D reconstruction out of individual photos is a long studied topic in computer vision. Yet none of the existing reconstruction pipelines fully addresses a progressive scenario where images are only getting available during the reconstruction process and intermediate results are delivered to the user. Incremental pipelines are capable of growing a 3D model but often get stuck in local minima due to wrong (binding) decisions taken based on incomplete information. Global pipelines on the other hand need the access to the complete viewgraph and are not capable of delivering intermediate results. In this paper we propose a new reconstruction pipeline working in a progressive manner rather than in a batch processing scheme. The pipeline is able to recover from failed reconstructions in early stages, avoids to take binding decisions, delivers a progressive output and yet maintains the capabilities of existing pipelines. We demonstrate and evaluate our method on diverse challenging public and dedicated datasets including those with highly symmetric structures and compare to the state of the art.
Learned Multi-Patch Similarity
Aug 21, 2017
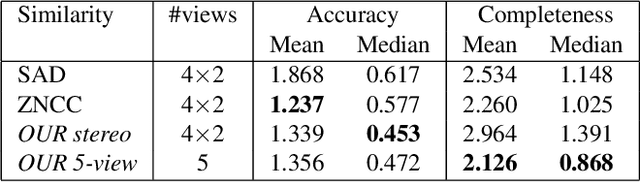
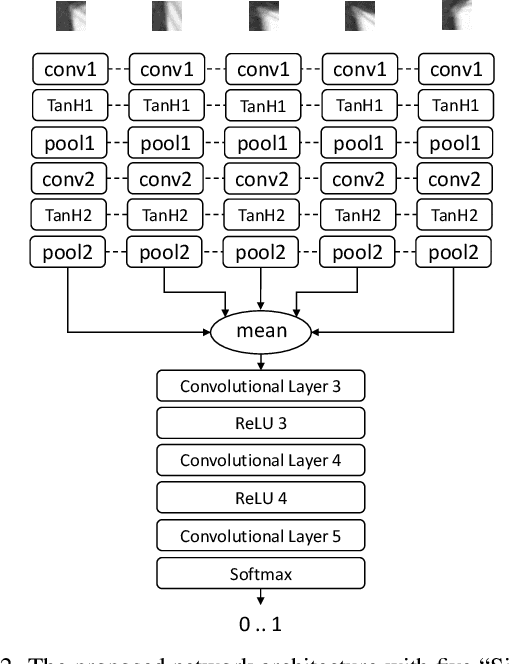
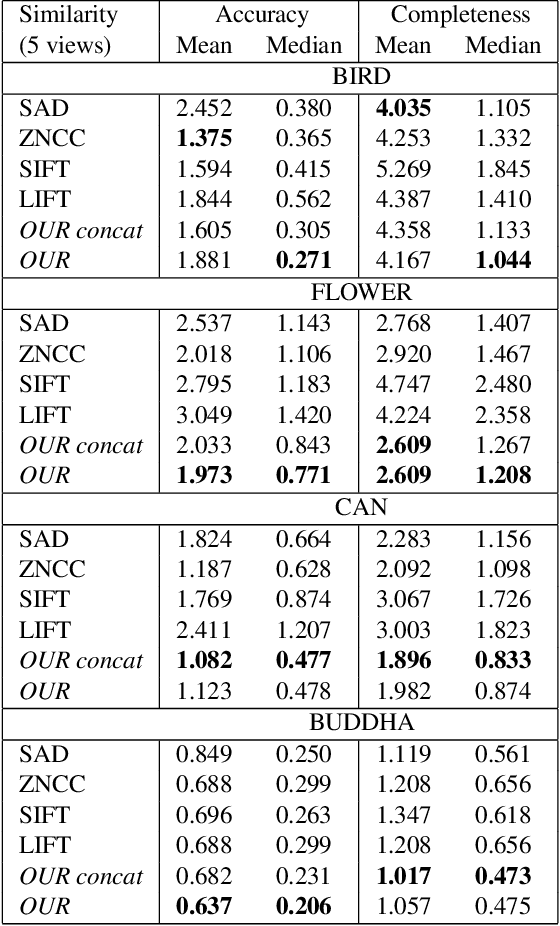
Estimating a depth map from multiple views of a scene is a fundamental task in computer vision. As soon as more than two viewpoints are available, one faces the very basic question how to measure similarity across >2 image patches. Surprisingly, no direct solution exists, instead it is common to fall back to more or less robust averaging of two-view similarities. Encouraged by the success of machine learning, and in particular convolutional neural networks, we propose to learn a matching function which directly maps multiple image patches to a scalar similarity score. Experiments on several multi-view datasets demonstrate that this approach has advantages over methods based on pairwise patch similarity.