 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmall Vision-Language Models are Smart Compressors for Long Video Understanding
Apr 09, 2026Adapting Multimodal Large Language Models (MLLMs) for hour-long videos is bottlenecked by context limits. Dense visual streams saturate token budgets and exacerbate the lost-in-the-middle phenomenon. Existing heuristics, like sparse sampling or uniform pooling, blindly sacrifice fidelity by discarding decisive moments and wasting bandwidth on irrelevant backgrounds. We propose Tempo, an efficient query-aware framework compressing long videos for downstream understanding. Tempo leverages a Small Vision-Language Model (SVLM) as a local temporal compressor, casting token reduction as an early cross-modal distillation process to generate compact, intent-aligned representations in a single forward pass. To enforce strict budgets without breaking causality, we introduce Adaptive Token Allocation (ATA). Exploiting the SVLM's zero-shot relevance prior and semantic front-loading, ATA acts as a training-free $O(1)$ dynamic router. It allocates dense bandwidth to query-critical segments while compressing redundancies into minimal temporal anchors to maintain the global storyline. Extensive experiments show our 6B architecture achieves state-of-the-art performance with aggressive dynamic compression (0.5-16 tokens/frame). On the extreme-long LVBench (4101s), Tempo scores 52.3 under a strict 8K visual budget, outperforming GPT-4o and Gemini 1.5 Pro. Scaling to 2048 frames reaches 53.7. Crucially, Tempo compresses hour-long videos substantially below theoretical limits, proving true long-form video understanding relies on intent-driven efficiency rather than greedily padded context windows.
Efficient Universal Perception Encoder
Mar 23, 2026Running AI models on smart edge devices can unlock versatile user experiences, but presents challenges due to limited compute and the need to handle multiple tasks simultaneously. This requires a vision encoder with small size but powerful and versatile representations. We present our method, Efficient Universal Perception Encoder (EUPE), which offers both inference efficiency and universally good representations for diverse downstream tasks. We achieve this by distilling from multiple domain-expert foundation vision encoders. Unlike previous agglomerative methods that directly scale down from multiple teachers to an efficient encoder, we demonstrate the importance of first scaling up to a large proxy teacher and then scaling down from this single teacher. Experiments show that EUPE achieves on-par or better performance than individual domain experts of the same size on diverse task domains and also outperforms previous agglomerative encoders. We will release the full family of EUPE models and the code to foster future research.
UPLiFT: Efficient Pixel-Dense Feature Upsampling with Local Attenders
Jan 25, 2026The space of task-agnostic feature upsampling has emerged as a promising area of research to efficiently create denser features from pre-trained visual backbones. These methods act as a shortcut to achieve dense features for a fraction of the cost by learning to map low-resolution features to high-resolution versions. While early works in this space used iterative upsampling approaches, more recent works have switched to cross-attention-based methods, which risk falling into the same efficiency scaling problems of the backbones they are upsampling. In this work, we demonstrate that iterative upsampling methods can still compete with cross-attention-based methods; moreover, they can achieve state-of-the-art performance with lower inference costs. We propose UPLiFT, an architecture for Universal Pixel-dense Lightweight Feature Transforms. We also propose an efficient Local Attender operator to overcome the limitations of prior iterative feature upsampling methods. This operator uses an alternative attentional pooling formulation defined fully locally. We show that our Local Attender allows UPLiFT to maintain stable features throughout upsampling, enabling state-of-the-art performance with lower inference costs than existing pixel-dense feature upsamplers. In addition, we apply UPLiFT to generative downstream tasks and show that it achieves competitive performance with state-of-the-art Coupled Flow Matching models for VAE feature upsampling. Altogether, UPLiFT offers a versatile and efficient approach to creating denser features.
VideoAuto-R1: Video Auto Reasoning via Thinking Once, Answering Twice
Jan 08, 2026Chain-of-thought (CoT) reasoning has emerged as a powerful tool for multimodal large language models on video understanding tasks. However, its necessity and advantages over direct answering remain underexplored. In this paper, we first demonstrate that for RL-trained video models, direct answering often matches or even surpasses CoT performance, despite CoT producing step-by-step analyses at a higher computational cost. Motivated by this, we propose VideoAuto-R1, a video understanding framework that adopts a reason-when-necessary strategy. During training, our approach follows a Thinking Once, Answering Twice paradigm: the model first generates an initial answer, then performs reasoning, and finally outputs a reviewed answer. Both answers are supervised via verifiable rewards. During inference, the model uses the confidence score of the initial answer to determine whether to proceed with reasoning. Across video QA and grounding benchmarks, VideoAuto-R1 achieves state-of-the-art accuracy with significantly improved efficiency, reducing the average response length by ~3.3x, e.g., from 149 to just 44 tokens. Moreover, we observe a low rate of thinking-mode activation on perception-oriented tasks, but a higher rate on reasoning-intensive tasks. This suggests that explicit language-based reasoning is generally beneficial but not always necessary.
EdgeTAM: On-Device Track Anything Model
Jan 13, 2025On top of Segment Anything Model (SAM), SAM 2 further extends its capability from image to video inputs through a memory bank mechanism and obtains a remarkable performance compared with previous methods, making it a foundation model for video segmentation task. In this paper, we aim at making SAM 2 much more efficient so that it even runs on mobile devices while maintaining a comparable performance. Despite several works optimizing SAM for better efficiency, we find they are not sufficient for SAM 2 because they all focus on compressing the image encoder, while our benchmark shows that the newly introduced memory attention blocks are also the latency bottleneck. Given this observation, we propose EdgeTAM, which leverages a novel 2D Spatial Perceiver to reduce the computational cost. In particular, the proposed 2D Spatial Perceiver encodes the densely stored frame-level memories with a lightweight Transformer that contains a fixed set of learnable queries. Given that video segmentation is a dense prediction task, we find preserving the spatial structure of the memories is essential so that the queries are split into global-level and patch-level groups. We also propose a distillation pipeline that further improves the performance without inference overhead. As a result, EdgeTAM achieves 87.7, 70.0, 72.3, and 71.7 J&F on DAVIS 2017, MOSE, SA-V val, and SA-V test, while running at 16 FPS on iPhone 15 Pro Max.
Efficient Track Anything
Nov 28, 2024Segment Anything Model 2 (SAM 2) has emerged as a powerful tool for video object segmentation and tracking anything. Key components of SAM 2 that drive the impressive video object segmentation performance include a large multistage image encoder for frame feature extraction and a memory mechanism that stores memory contexts from past frames to help current frame segmentation. The high computation complexity of multistage image encoder and memory module has limited its applications in real-world tasks, e.g., video object segmentation on mobile devices. To address this limitation, we propose EfficientTAMs, lightweight track anything models that produce high-quality results with low latency and model size. Our idea is based on revisiting the plain, nonhierarchical Vision Transformer (ViT) as an image encoder for video object segmentation, and introducing an efficient memory module, which reduces the complexity for both frame feature extraction and memory computation for current frame segmentation. We take vanilla lightweight ViTs and efficient memory module to build EfficientTAMs, and train the models on SA-1B and SA-V datasets for video object segmentation and track anything tasks. We evaluate on multiple video segmentation benchmarks including semi-supervised VOS and promptable video segmentation, and find that our proposed EfficientTAM with vanilla ViT perform comparably to SAM 2 model (HieraB+SAM 2) with ~2x speedup on A100 and ~2.4x parameter reduction. On segment anything image tasks, our EfficientTAMs also perform favorably over original SAM with ~20x speedup on A100 and ~20x parameter reduction. On mobile devices such as iPhone 15 Pro Max, our EfficientTAMs can run at ~10 FPS for performing video object segmentation with reasonable quality, highlighting the capability of small models for on-device video object segmentation applications.
VeriGraph: Scene Graphs for Execution Verifiable Robot Planning
Nov 15, 2024



Recent advancements in vision-language models (VLMs) offer potential for robot task planning, but challenges remain due to VLMs' tendency to generate incorrect action sequences. To address these limitations, we propose VeriGraph, a novel framework that integrates VLMs for robotic planning while verifying action feasibility. VeriGraph employs scene graphs as an intermediate representation, capturing key objects and spatial relationships to improve plan verification and refinement. The system generates a scene graph from input images and uses it to iteratively check and correct action sequences generated by an LLM-based task planner, ensuring constraints are respected and actions are executable. Our approach significantly enhances task completion rates across diverse manipulation scenarios, outperforming baseline methods by 58% for language-based tasks and 30% for image-based tasks.
LARP: Tokenizing Videos with a Learned Autoregressive Generative Prior
Oct 28, 2024We present LARP, a novel video tokenizer designed to overcome limitations in current video tokenization methods for autoregressive (AR) generative models. Unlike traditional patchwise tokenizers that directly encode local visual patches into discrete tokens, LARP introduces a holistic tokenization scheme that gathers information from the visual content using a set of learned holistic queries. This design allows LARP to capture more global and semantic representations, rather than being limited to local patch-level information. Furthermore, it offers flexibility by supporting an arbitrary number of discrete tokens, enabling adaptive and efficient tokenization based on the specific requirements of the task. To align the discrete token space with downstream AR generation tasks, LARP integrates a lightweight AR transformer as a training-time prior model that predicts the next token on its discrete latent space. By incorporating the prior model during training, LARP learns a latent space that is not only optimized for video reconstruction but is also structured in a way that is more conducive to autoregressive generation. Moreover, this process defines a sequential order for the discrete tokens, progressively pushing them toward an optimal configuration during training, ensuring smoother and more accurate AR generation at inference time. Comprehensive experiments demonstrate LARP's strong performance, achieving state-of-the-art FVD on the UCF101 class-conditional video generation benchmark. LARP enhances the compatibility of AR models with videos and opens up the potential to build unified high-fidelity multimodal large language models (MLLMs).
UVIS: Unsupervised Video Instance Segmentation
Jun 11, 2024


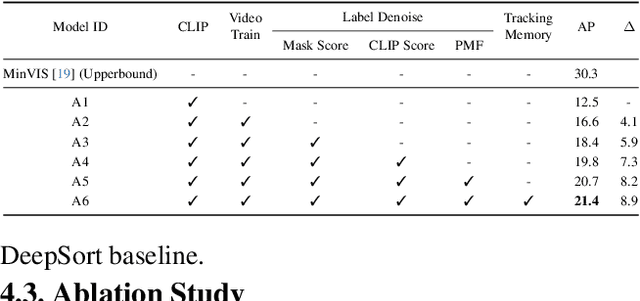
Video instance segmentation requires classifying, segmenting, and tracking every object across video frames. Unlike existing approaches that rely on masks, boxes, or category labels, we propose UVIS, a novel Unsupervised Video Instance Segmentation (UVIS) framework that can perform video instance segmentation without any video annotations or dense label-based pretraining. Our key insight comes from leveraging the dense shape prior from the self-supervised vision foundation model DINO and the openset recognition ability from the image-caption supervised vision-language model CLIP. Our UVIS framework consists of three essential steps: frame-level pseudo-label generation, transformer-based VIS model training, and query-based tracking. To improve the quality of VIS predictions in the unsupervised setup, we introduce a dual-memory design. This design includes a semantic memory bank for generating accurate pseudo-labels and a tracking memory bank for maintaining temporal consistency in object tracks. We evaluate our approach on three standard VIS benchmarks, namely YoutubeVIS-2019, YoutubeVIS-2021, and Occluded VIS. Our UVIS achieves 21.1 AP on YoutubeVIS-2019 without any video annotations or dense pretraining, demonstrating the potential of our unsupervised VIS framework.
LiFT: A Surprisingly Simple Lightweight Feature Transform for Dense ViT Descriptors
Mar 21, 2024We present a simple self-supervised method to enhance the performance of ViT features for dense downstream tasks. Our Lightweight Feature Transform (LiFT) is a straightforward and compact postprocessing network that can be applied to enhance the features of any pre-trained ViT backbone. LiFT is fast and easy to train with a self-supervised objective, and it boosts the density of ViT features for minimal extra inference cost. Furthermore, we demonstrate that LiFT can be applied with approaches that use additional task-specific downstream modules, as we integrate LiFT with ViTDet for COCO detection and segmentation. Despite the simplicity of LiFT, we find that it is not simply learning a more complex version of bilinear interpolation. Instead, our LiFT training protocol leads to several desirable emergent properties that benefit ViT features in dense downstream tasks. This includes greater scale invariance for features, and better object boundary maps. By simply training LiFT for a few epochs, we show improved performance on keypoint correspondence, detection, segmentation, and object discovery tasks. Overall, LiFT provides an easy way to unlock the benefits of denser feature arrays for a fraction of the computational cost. For more details, refer to our project page at https://www.cs.umd.edu/~sakshams/LiFT/.