 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLook Ma, no markers: holistic performance capture without the hassle
Oct 15, 2024



We tackle the problem of highly-accurate, holistic performance capture for the face, body and hands simultaneously. Motion-capture technologies used in film and game production typically focus only on face, body or hand capture independently, involve complex and expensive hardware and a high degree of manual intervention from skilled operators. While machine-learning-based approaches exist to overcome these problems, they usually only support a single camera, often operate on a single part of the body, do not produce precise world-space results, and rarely generalize outside specific contexts. In this work, we introduce the first technique for marker-free, high-quality reconstruction of the complete human body, including eyes and tongue, without requiring any calibration, manual intervention or custom hardware. Our approach produces stable world-space results from arbitrary camera rigs as well as supporting varied capture environments and clothing. We achieve this through a hybrid approach that leverages machine learning models trained exclusively on synthetic data and powerful parametric models of human shape and motion. We evaluate our method on a number of body, face and hand reconstruction benchmarks and demonstrate state-of-the-art results that generalize on diverse datasets.
SimpleEgo: Predicting Probabilistic Body Pose from Egocentric Cameras
Jan 26, 2024



Our work addresses the problem of egocentric human pose estimation from downwards-facing cameras on head-mounted devices (HMD). This presents a challenging scenario, as parts of the body often fall outside of the image or are occluded. Previous solutions minimize this problem by using fish-eye camera lenses to capture a wider view, but these can present hardware design issues. They also predict 2D heat-maps per joint and lift them to 3D space to deal with self-occlusions, but this requires large network architectures which are impractical to deploy on resource-constrained HMDs. We predict pose from images captured with conventional rectilinear camera lenses. This resolves hardware design issues, but means body parts are often out of frame. As such, we directly regress probabilistic joint rotations represented as matrix Fisher distributions for a parameterized body model. This allows us to quantify pose uncertainties and explain out-of-frame or occluded joints. This also removes the need to compute 2D heat-maps and allows for simplified DNN architectures which require less compute. Given the lack of egocentric datasets using rectilinear camera lenses, we introduce the SynthEgo dataset, a synthetic dataset with 60K stereo images containing high diversity of pose, shape, clothing and skin tone. Our approach achieves state-of-the-art results for this challenging configuration, reducing mean per-joint position error by 23% overall and 58% for the lower body. Our architecture also has eight times fewer parameters and runs twice as fast as the current state-of-the-art. Experiments show that training on our synthetic dataset leads to good generalization to real world images without fine-tuning.
3DiFACE: Diffusion-based Speech-driven 3D Facial Animation and Editing
Dec 01, 2023



We present 3DiFACE, a novel method for personalized speech-driven 3D facial animation and editing. While existing methods deterministically predict facial animations from speech, they overlook the inherent one-to-many relationship between speech and facial expressions, i.e., there are multiple reasonable facial expression animations matching an audio input. It is especially important in content creation to be able to modify generated motion or to specify keyframes. To enable stochasticity as well as motion editing, we propose a lightweight audio-conditioned diffusion model for 3D facial motion. This diffusion model can be trained on a small 3D motion dataset, maintaining expressive lip motion output. In addition, it can be finetuned for specific subjects, requiring only a short video of the person. Through quantitative and qualitative evaluations, we show that our method outperforms existing state-of-the-art techniques and yields speech-driven animations with greater fidelity and diversity.
HMD-NeMo: Online 3D Avatar Motion Generation From Sparse Observations
Aug 22, 2023



Generating both plausible and accurate full body avatar motion is the key to the quality of immersive experiences in mixed reality scenarios. Head-Mounted Devices (HMDs) typically only provide a few input signals, such as head and hands 6-DoF. Recently, different approaches achieved impressive performance in generating full body motion given only head and hands signal. However, to the best of our knowledge, all existing approaches rely on full hand visibility. While this is the case when, e.g., using motion controllers, a considerable proportion of mixed reality experiences do not involve motion controllers and instead rely on egocentric hand tracking. This introduces the challenge of partial hand visibility owing to the restricted field of view of the HMD. In this paper, we propose the first unified approach, HMD-NeMo, that addresses plausible and accurate full body motion generation even when the hands may be only partially visible. HMD-NeMo is a lightweight neural network that predicts the full body motion in an online and real-time fashion. At the heart of HMD-NeMo is the spatio-temporal encoder with novel temporally adaptable mask tokens that encourage plausible motion in the absence of hand observations. We perform extensive analysis of the impact of different components in HMD-NeMo and introduce a new state-of-the-art on AMASS dataset through our evaluation.
Probabilistic Human Mesh Recovery in 3D Scenes from Egocentric Views
Apr 12, 2023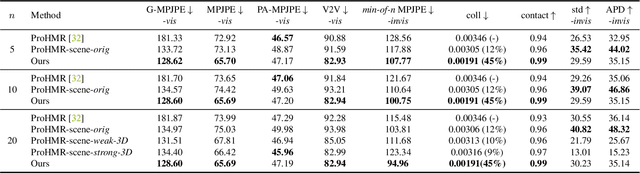
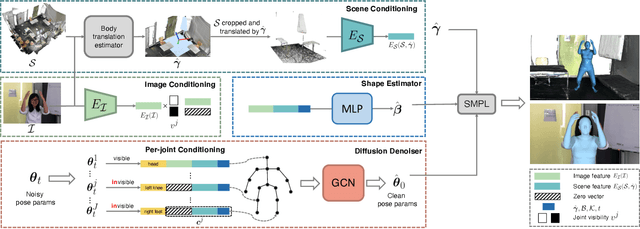
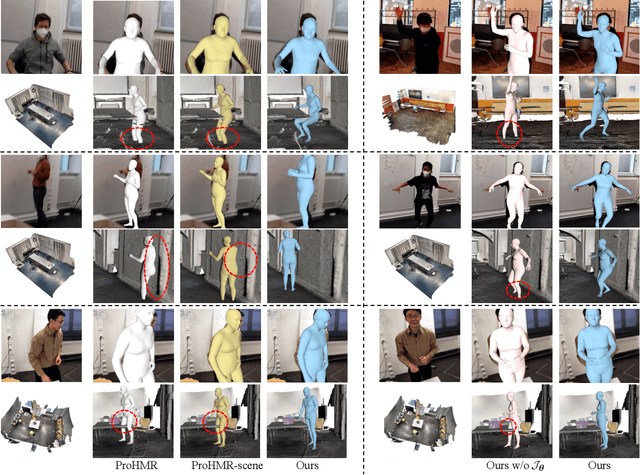
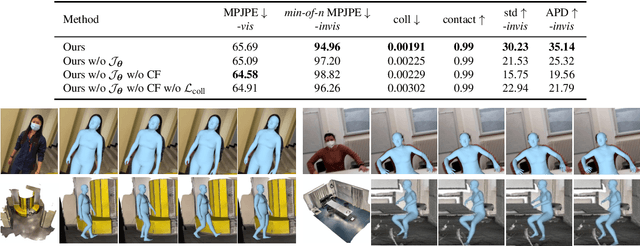
Automatic perception of human behaviors during social interactions is crucial for AR/VR applications, and an essential component is estimation of plausible 3D human pose and shape of our social partners from the egocentric view. One of the biggest challenges of this task is severe body truncation due to close social distances in egocentric scenarios, which brings large pose ambiguities for unseen body parts. To tackle this challenge, we propose a novel scene-conditioned diffusion method to model the body pose distribution. Conditioned on the 3D scene geometry, the diffusion model generates bodies in plausible human-scene interactions, with the sampling guided by a physics-based collision score to further resolve human-scene inter-penetrations. The classifier-free training enables flexible sampling with different conditions and enhanced diversity. A visibility-aware graph convolution model guided by per-joint visibility serves as the diffusion denoiser to incorporate inter-joint dependencies and per-body-part control. Extensive evaluations show that our method generates bodies in plausible interactions with 3D scenes, achieving both superior accuracy for visible joints and diversity for invisible body parts. The code will be available at https://sanweiliti.github.io/egohmr/egohmr.html.
Imitator: Personalized Speech-driven 3D Facial Animation
Dec 30, 2022Speech-driven 3D facial animation has been widely explored, with applications in gaming, character animation, virtual reality, and telepresence systems. State-of-the-art methods deform the face topology of the target actor to sync the input audio without considering the identity-specific speaking style and facial idiosyncrasies of the target actor, thus, resulting in unrealistic and inaccurate lip movements. To address this, we present Imitator, a speech-driven facial expression synthesis method, which learns identity-specific details from a short input video and produces novel facial expressions matching the identity-specific speaking style and facial idiosyncrasies of the target actor. Specifically, we train a style-agnostic transformer on a large facial expression dataset which we use as a prior for audio-driven facial expressions. Based on this prior, we optimize for identity-specific speaking style based on a short reference video. To train the prior, we introduce a novel loss function based on detected bilabial consonants to ensure plausible lip closures and consequently improve the realism of the generated expressions. Through detailed experiments and a user study, we show that our approach produces temporally coherent facial expressions from input audio while preserving the speaking style of the target actors.
FLAG: Flow-based 3D Avatar Generation from Sparse Observations
Mar 11, 2022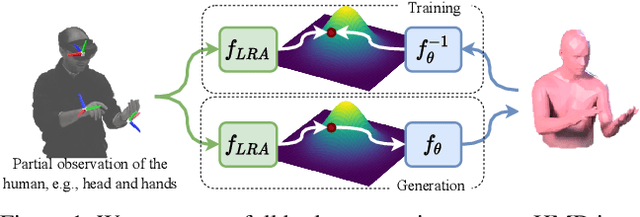
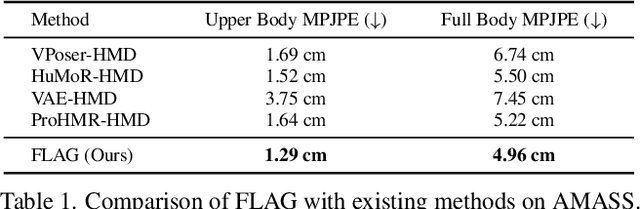
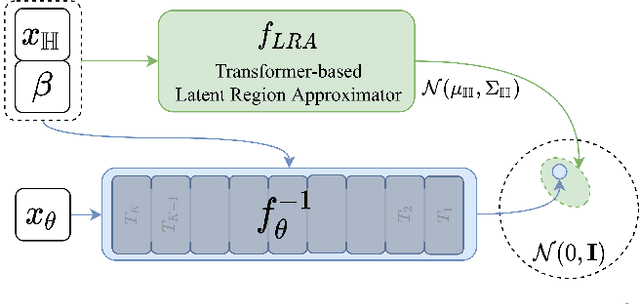
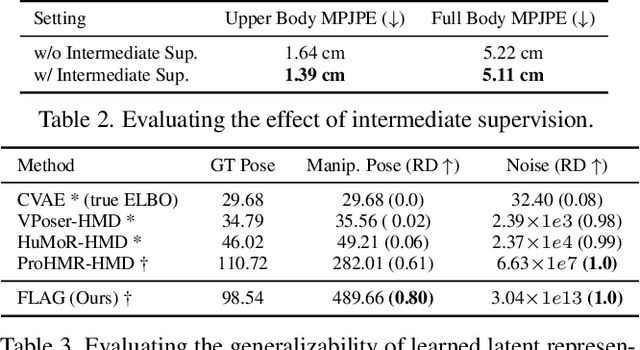
To represent people in mixed reality applications for collaboration and communication, we need to generate realistic and faithful avatar poses. However, the signal streams that can be applied for this task from head-mounted devices (HMDs) are typically limited to head pose and hand pose estimates. While these signals are valuable, they are an incomplete representation of the human body, making it challenging to generate a faithful full-body avatar. We address this challenge by developing a flow-based generative model of the 3D human body from sparse observations, wherein we learn not only a conditional distribution of 3D human pose, but also a probabilistic mapping from observations to the latent space from which we can generate a plausible pose along with uncertainty estimates for the joints. We show that our approach is not only a strong predictive model, but can also act as an efficient pose prior in different optimization settings where a good initial latent code plays a major role.
Probabilistic Tracklet Scoring and Inpainting for Multiple Object Tracking
Dec 10, 2020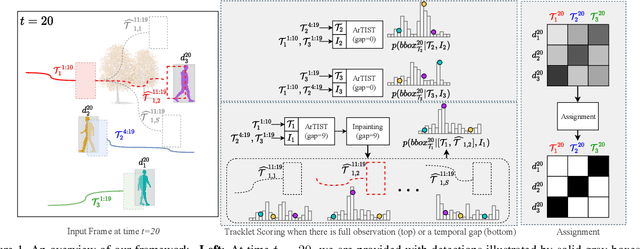
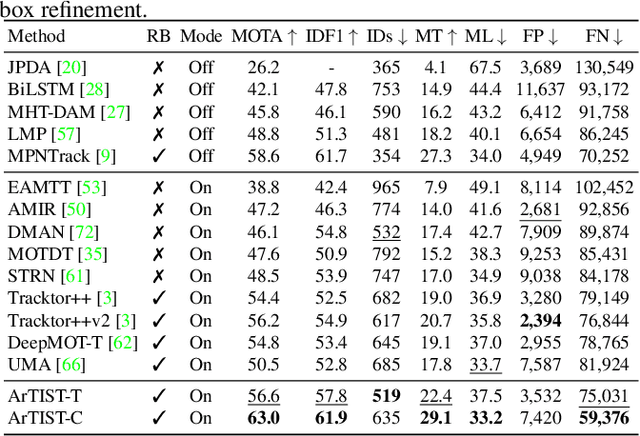
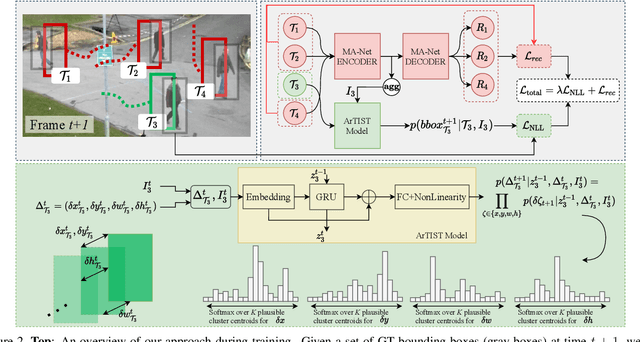
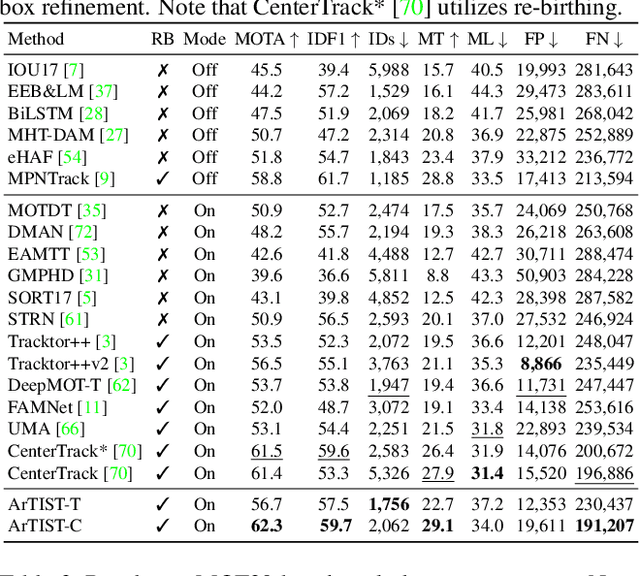
Despite the recent advances in multiple object tracking (MOT), achieved by joint detection and tracking, dealing with long occlusions remains a challenge. This is due to the fact that such techniques tend to ignore the long-term motion information. In this paper, we introduce a probabilistic autoregressive motion model to score tracklet proposals by directly measuring their likelihood. This is achieved by training our model to learn the underlying distribution of natural tracklets. As such, our model allows us not only to assign new detections to existing tracklets, but also to inpaint a tracklet when an object has been lost for a long time, e.g., due to occlusion, by sampling tracklets so as to fill the gap caused by misdetections. Our experiments demonstrate the superiority of our approach at tracking objects in challenging sequences; it outperforms the state of the art in most standard MOT metrics on multiple MOT benchmark datasets, including MOT16, MOT17, and MOT20.
Deep Sequence Learning for Video Anticipation: From Discrete and Deterministic to Continuous and Stochastic
Oct 09, 2020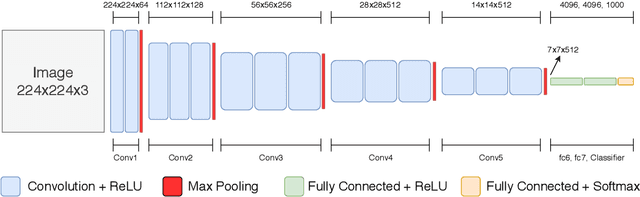



Video anticipation is the task of predicting one/multiple future representation(s) given limited, partial observation. This is a challenging task due to the fact that given limited observation, the future representation can be highly ambiguous. Based on the nature of the task, video anticipation can be considered from two viewpoints: the level of details and the level of determinism in the predicted future. In this research, we start from anticipating a coarse representation of a deterministic future and then move towards predicting continuous and fine-grained future representations of a stochastic process. The example of the former is video action anticipation in which we are interested in predicting one action label given a partially observed video and the example of the latter is forecasting multiple diverse continuations of human motion given partially observed one. In particular, in this thesis, we make several contributions to the literature of video anticipation...
Uncertainty Inspired RGB-D Saliency Detection
Sep 07, 2020
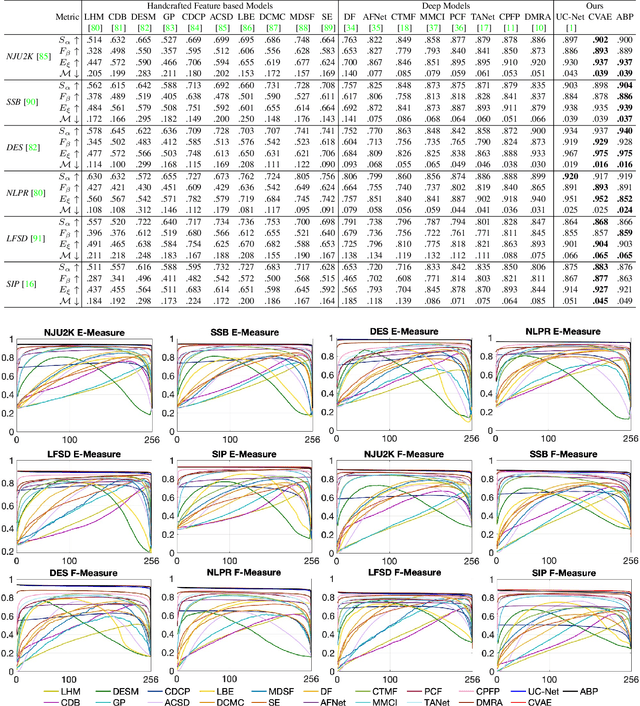
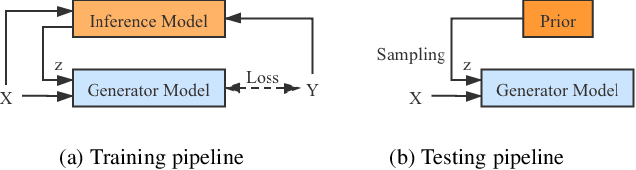

We propose the first stochastic framework to employ uncertainty for RGB-D saliency detection by learning from the data labeling process. Existing RGB-D saliency detection models treat this task as a point estimation problem by predicting a single saliency map following a deterministic learning pipeline. We argue that, however, the deterministic solution is relatively ill-posed. Inspired by the saliency data labeling process, we propose a generative architecture to achieve probabilistic RGB-D saliency detection which utilizes a latent variable to model the labeling variations. Our framework includes two main models: 1) a generator model, which maps the input image and latent variable to stochastic saliency prediction, and 2) an inference model, which gradually updates the latent variable by sampling it from the true or approximate posterior distribution. The generator model is an encoder-decoder saliency network. To infer the latent variable, we introduce two different solutions: i) a Conditional Variational Auto-encoder with an extra encoder to approximate the posterior distribution of the latent variable; and ii) an Alternating Back-Propagation technique, which directly samples the latent variable from the true posterior distribution. Qualitative and quantitative results on six challenging RGB-D benchmark datasets show our approach's superior performance in learning the distribution of saliency maps. The source code is publicly available via our project page: https://github.com/JingZhang617/UCNet.