 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Voting-Based Task Assignment in Modular Construction Scenarios
May 19, 2025Modular construction, involving off-site prefabrication and on-site assembly, offers significant advantages but presents complex coordination challenges for robotic automation. Effective task allocation is critical for leveraging multi-agent systems (MAS) in these structured environments. This paper introduces the Hybrid Voting-Based Task Assignment (HVBTA) framework, a novel approach to optimizing collaboration between heterogeneous multi-agent construction teams. Inspired by human reasoning in task delegation, HVBTA uniquely integrates multiple voting mechanisms with the capabilities of a Large Language Model (LLM) for nuanced suitability assessment between agent capabilities and task requirements. The framework operates by assigning Capability Profiles to agents and detailed requirement lists called Task Descriptions to construction tasks, subsequently generating a quantitative Suitability Matrix. Six distinct voting methods, augmented by a pre-trained LLM, analyze this matrix to robustly identify the optimal agent for each task. Conflict-Based Search (CBS) is integrated for decentralized, collision-free path planning, ensuring efficient and safe spatio-temporal coordination of the robotic team during assembly operations. HVBTA enables efficient, conflict-free assignment and coordination, facilitating potentially faster and more accurate modular assembly. Current work is evaluating HVBTA's performance across various simulated construction scenarios involving diverse robotic platforms and task complexities. While designed as a generalizable framework for any domain with clearly definable tasks and capabilities, HVBTA will be particularly effective for addressing the demanding coordination requirements of multi-agent collaborative robotics in modular construction due to the predetermined construction planning involved.
Hybrid Voting-Based Task Assignment in Role-Playing Games
Feb 25, 2025In role-playing games (RPGs), the level of immersion is critical-especially when an in-game agent conveys tasks, hints, or ideas to the player. For an agent to accurately interpret the player's emotional state and contextual nuances, a foundational level of understanding is required, which can be achieved using a Large Language Model (LLM). Maintaining the LLM's focus across multiple context changes, however, necessitates a more robust approach, such as integrating the LLM with a dedicated task allocation model to guide its performance throughout gameplay. In response to this need, we introduce Voting-Based Task Assignment (VBTA), a framework inspired by human reasoning in task allocation and completion. VBTA assigns capability profiles to agents and task descriptions to tasks, then generates a suitability matrix that quantifies the alignment between an agent's abilities and a task's requirements. Leveraging six distinct voting methods, a pre-trained LLM, and integrating conflict-based search (CBS) for path planning, VBTA efficiently identifies and assigns the most suitable agent to each task. While existing approaches focus on generating individual aspects of gameplay, such as single quests, or combat encounters, our method shows promise when generating both unique combat encounters and narratives because of its generalizable nature.
Dialogue with Robots: Proposals for Broadening Participation and Research in the SLIVAR Community
Apr 01, 2024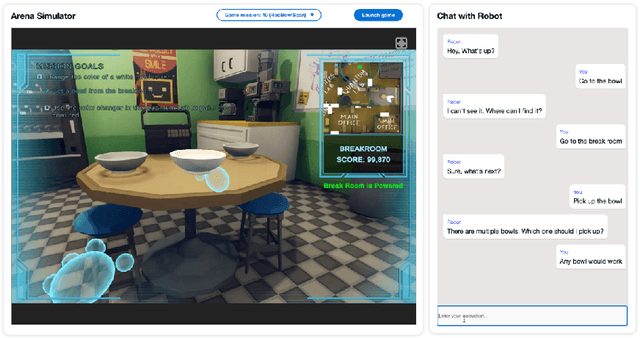
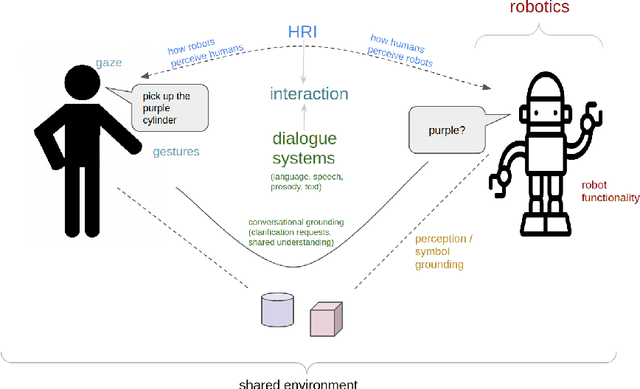
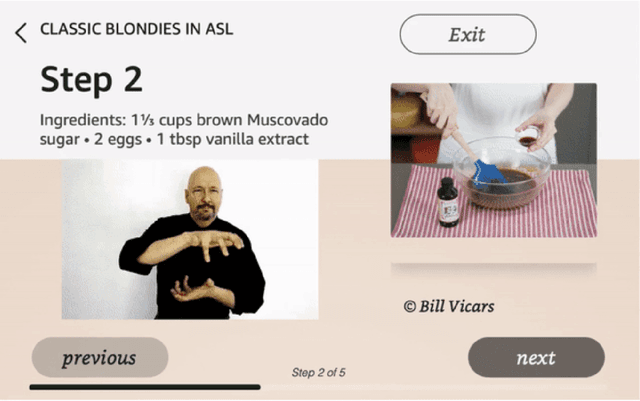
The ability to interact with machines using natural human language is becoming not just commonplace, but expected. The next step is not just text interfaces, but speech interfaces and not just with computers, but with all machines including robots. In this paper, we chronicle the recent history of this growing field of spoken dialogue with robots and offer the community three proposals, the first focused on education, the second on benchmarks, and the third on the modeling of language when it comes to spoken interaction with robots. The three proposals should act as white papers for any researcher to take and build upon.
Towards a Participatory and Social Justice-Oriented Measure of Human-Robot Trust
Feb 24, 2024Many measures of human-robot trust have proliferated across the HRI research literature because each attempts to capture the factors that impact trust despite its many dimensions. None of the previous trust measures, however, address the systems of inequity and structures of power present in HRI research or attempt to counteract the systematic biases and potential harms caused by HRI systems. This position paper proposes a participatory and social justice-oriented approach for the design and evaluation of a trust measure. This proposed process would iteratively co-design the trust measure with the community for whom the HRI system is being created. The process would prioritize that community's needs and unique circumstances to produce a trust measure that accurately reflects the factors that impact their trust in a robot.
Trust in Queer Human-Robot Interaction
Nov 13, 2023Human-robot interaction (HRI) systems need to build trust with people of diverse identities. This position paper argues that queer (LGBTQIA+) people must be included in the design and evaluation of HRI systems to ensure their trust in and acceptance of robots. Queer people have faced discrimination and harm from artificial intelligence and robotic systems. Despite calls for increased diversity and inclusion, HRI has not systemically addressed queer issues. This paper suggests three approaches to address trust in queer HRI: diversifying human-subject pools, centering queer people in HRI studies, and contextualizing measures of trust.
VBMO: Voting-Based Multi-Objective Path Planning
Aug 22, 2023This paper presents VBMO, the Voting-Based Multi-Objective path planning algorithm, that generates optimal single-objective plans, evaluates each of them with respect to the other objectives, and selects one with a voting mechanism. VBMO does not use hand-tuned weights, consider the multiple objectives at every step of search, or use an evolutionary algorithm. Instead, it considers how a plan that is optimal in one objective may perform well with respect to others. VBMO incorporates three voting mechanisms: range, Borda, and combined approval. Extensive evaluation in diverse and complex environments demonstrates the algorithm's ability to efficiently produce plans that satisfy multiple objectives.
Queer In AI: A Case Study in Community-Led Participatory AI
Apr 10, 2023We present Queer in AI as a case study for community-led participatory design in AI. We examine how participatory design and intersectional tenets started and shaped this community's programs over the years. We discuss different challenges that emerged in the process, look at ways this organization has fallen short of operationalizing participatory and intersectional principles, and then assess the organization's impact. Queer in AI provides important lessons and insights for practitioners and theorists of participatory methods broadly through its rejection of hierarchy in favor of decentralization, success at building aid and programs by and for the queer community, and effort to change actors and institutions outside of the queer community. Finally, we theorize how communities like Queer in AI contribute to the participatory design in AI more broadly by fostering cultures of participation in AI, welcoming and empowering marginalized participants, critiquing poor or exploitative participatory practices, and bringing participation to institutions outside of individual research projects. Queer in AI's work serves as a case study of grassroots activism and participatory methods within AI, demonstrating the potential of community-led participatory methods and intersectional praxis, while also providing challenges, case studies, and nuanced insights to researchers developing and using participatory methods.
Deliberate Exploration Supports Navigation in Unfamiliar Worlds
Jul 01, 2020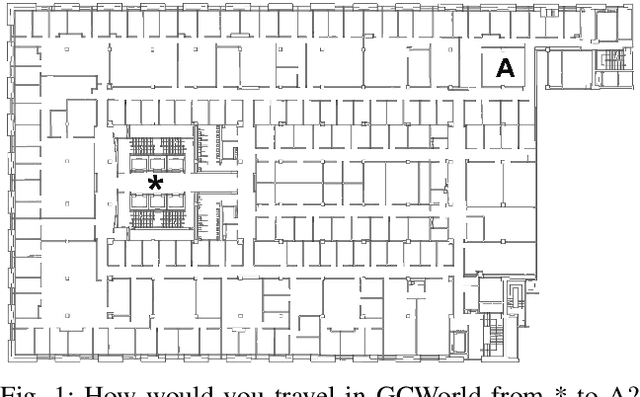
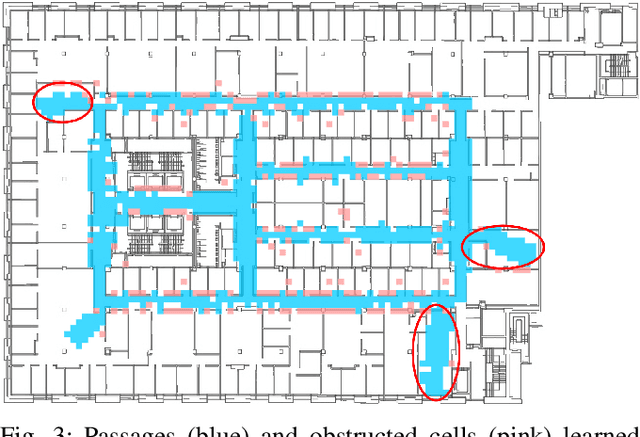
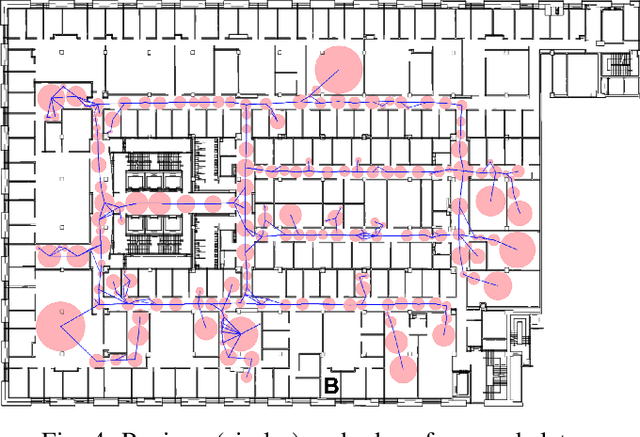
To perform tasks well in a new domain, one must first know something about it. This paper reports on a robot controller for navigation through unfamiliar indoor worlds. Based on spatial affordances, it integrates planning with reactive heuristics. Before it addresses specific targets, however, the system deliberately explores for high-level connectivity and captures that data in a cognitive spatial model. Despite limited exploration time, planning in the resultant model is faster and better supports successful travel in a challenging, realistic space.
MengeROS: a Crowd Simulation Tool for Autonomous Robot Navigation
Jan 26, 2018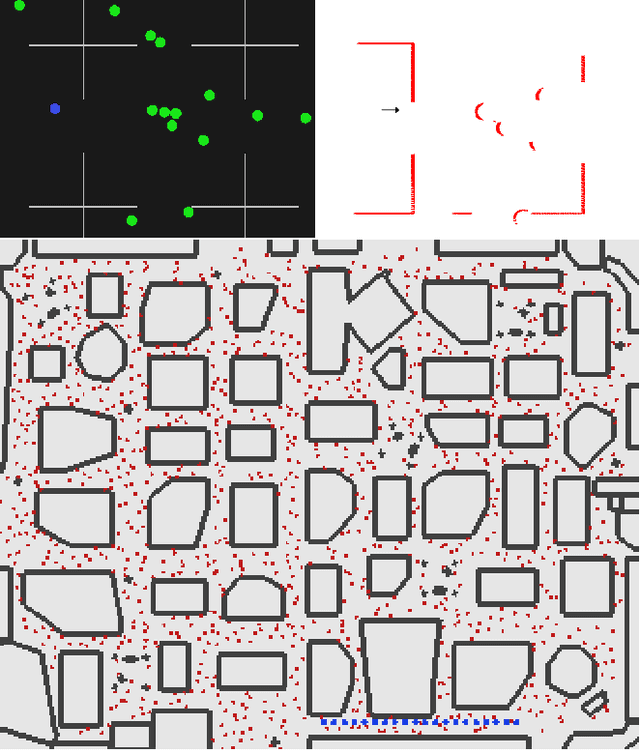
While effective navigation in large, crowded environments is essential for an autonomous robot, preliminary testing of algorithms to support it requires simulation across a broad range of crowd scenarios. Most available simulation tools provide either realistic crowds without robots or realistic robots without realistic crowds. This paper introduces MengeROS, a 2-D simulator that realistically integrates multiple robots and crowds. MengeROS provides a broad range of settings in which to test the capabilities and performance of navigation algorithms designed for large crowded environments.
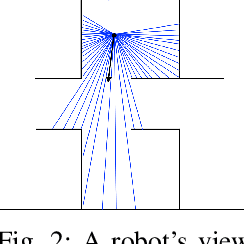
WHY: Natural Explanations from a Robot Navigator
Sep 27, 2017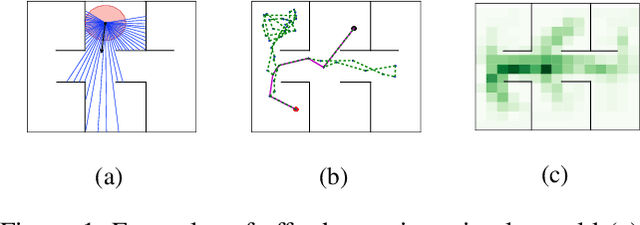
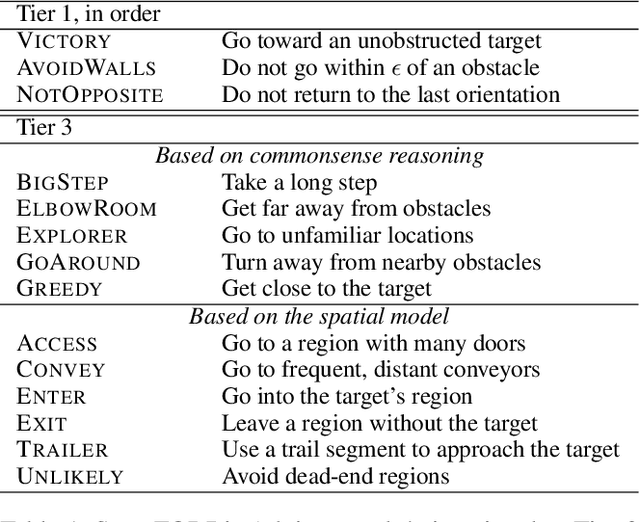
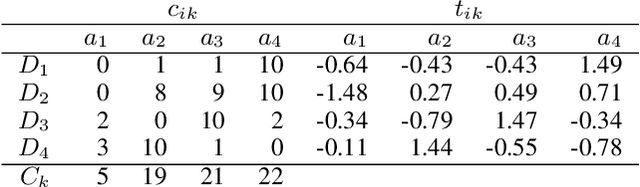
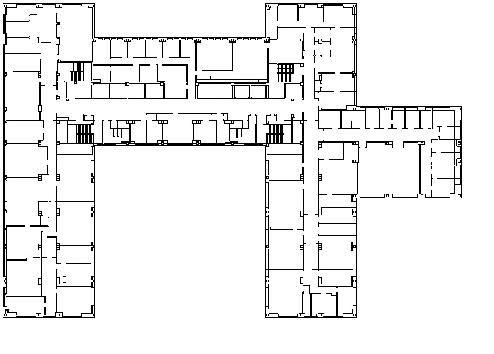
Effective collaboration between a robot and a person requires natural communication. When a robot travels with a human companion, the robot should be able to explain its navigation behavior in natural language. This paper explains how a cognitively-based, autonomous robot navigation system produces informative, intuitive explanations for its decisions. Language generation here is based upon the robot's commonsense, its qualitative reasoning, and its learned spatial model. This approach produces natural explanations in real time for a robot as it navigates in a large, complex indoor environment.