 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots in the Garden: Artificial Intelligence and Adaptive Landscapes
May 22, 2023This paper introduces ELUA, the Ecological Laboratory for Urban Agriculture, a collaboration among landscape architects, architects and computer scientists who specialize in artificial intelligence, robotics and computer vision. ELUA has two gantry robots, one indoors and the other outside on the rooftop of a 6-story campus building. Each robot can seed, water, weed, and prune in its garden. To support responsive landscape research, ELUA also includes sensor arrays, an AI-powered camera, and an extensive network infrastructure. This project demonstrates a way to integrate artificial intelligence into an evolving urban ecosystem, and encourages landscape architects to develop an adaptive design framework where design becomes a long-term engagement with the environment.
* 4 figures, 9 pages
Deliberate Exploration Supports Navigation in Unfamiliar Worlds
Jul 01, 2020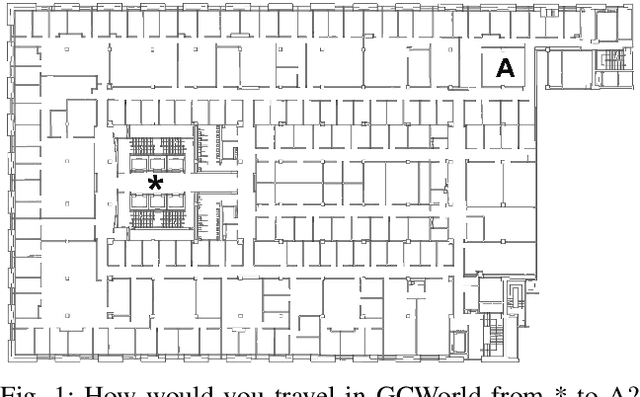
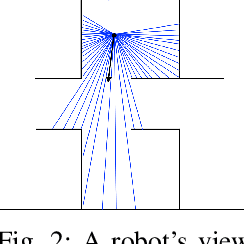
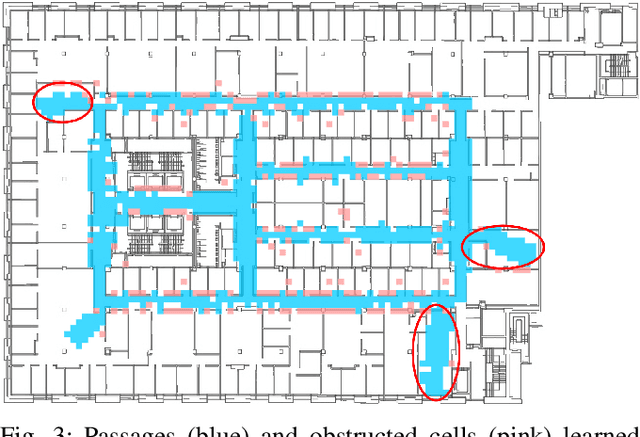
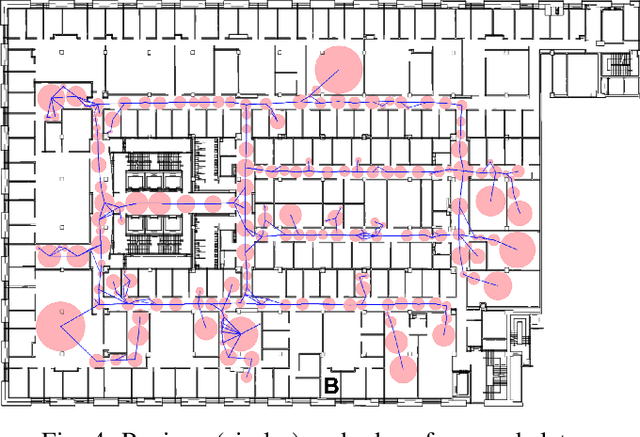
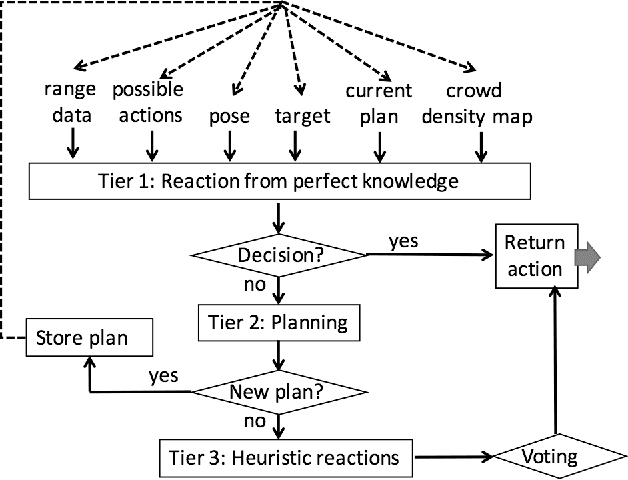
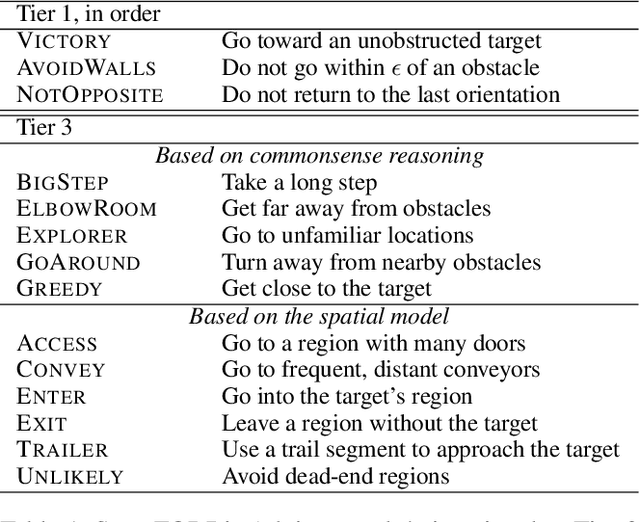
To perform tasks well in a new domain, one must first know something about it. This paper reports on a robot controller for navigation through unfamiliar indoor worlds. Based on spatial affordances, it integrates planning with reactive heuristics. Before it addresses specific targets, however, the system deliberately explores for high-level connectivity and captures that data in a cognitive spatial model. Despite limited exploration time, planning in the resultant model is faster and better supports successful travel in a challenging, realistic space.
MengeROS: a Crowd Simulation Tool for Autonomous Robot Navigation
Jan 26, 2018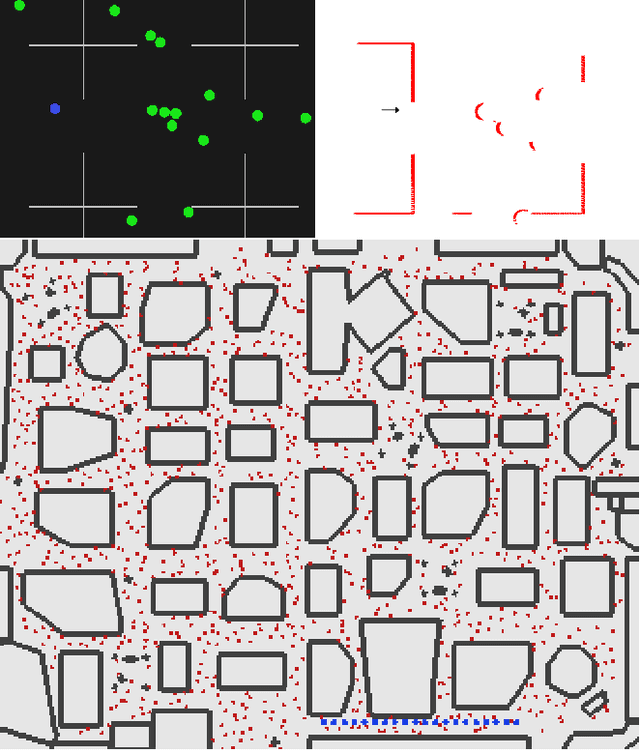
While effective navigation in large, crowded environments is essential for an autonomous robot, preliminary testing of algorithms to support it requires simulation across a broad range of crowd scenarios. Most available simulation tools provide either realistic crowds without robots or realistic robots without realistic crowds. This paper introduces MengeROS, a 2-D simulator that realistically integrates multiple robots and crowds. MengeROS provides a broad range of settings in which to test the capabilities and performance of navigation algorithms designed for large crowded environments.
Toward Crowd-Sensitive Path Planning
Oct 16, 2017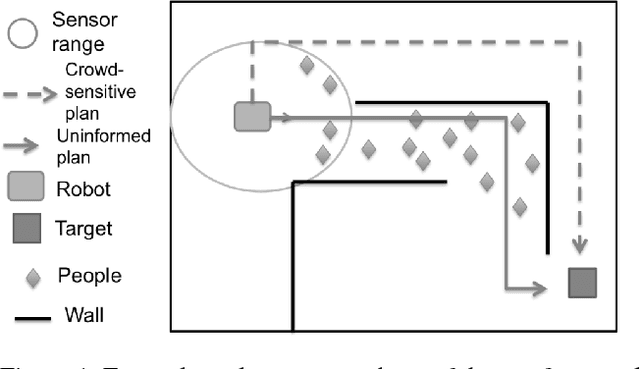
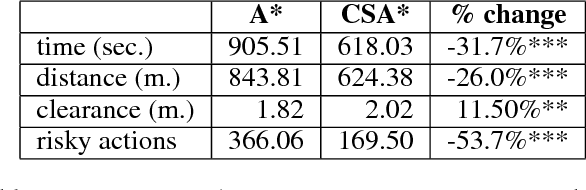

If a robot can predict crowds in parts of its environment that are inaccessible to its sensors, then it can plan to avoid them. This paper proposes a fast, online algorithm that learns average crowd densities in different areas. It also describes how these densities can be incorporated into existing navigation architectures. In simulation across multiple challenging crowd scenarios, the robot reaches its target faster, travels less, and risks fewer collisions than if it were to plan with the traditional A* algorithm.
WHY: Natural Explanations from a Robot Navigator
Sep 27, 2017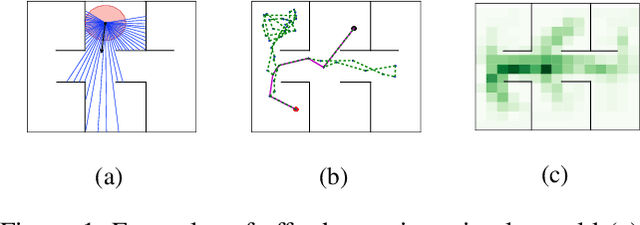
Effective collaboration between a robot and a person requires natural communication. When a robot travels with a human companion, the robot should be able to explain its navigation behavior in natural language. This paper explains how a cognitively-based, autonomous robot navigation system produces informative, intuitive explanations for its decisions. Language generation here is based upon the robot's commonsense, its qualitative reasoning, and its learned spatial model. This approach produces natural explanations in real time for a robot as it navigates in a large, complex indoor environment.