Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeliberate Exploration Supports Navigation in Unfamiliar Worlds
Paper and Code
Jul 01, 2020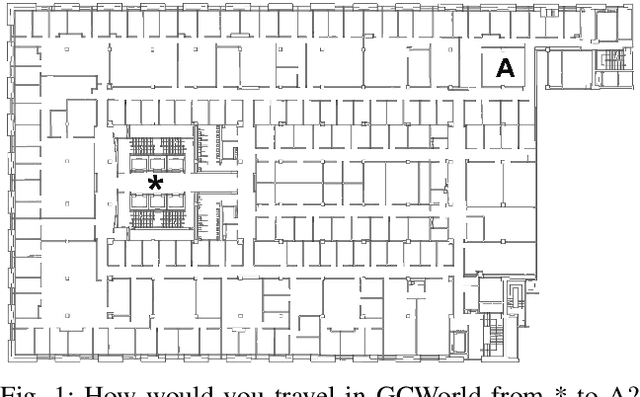
To perform tasks well in a new domain, one must first know something about it. This paper reports on a robot controller for navigation through unfamiliar indoor worlds. Based on spatial affordances, it integrates planning with reactive heuristics. Before it addresses specific targets, however, the system deliberately explores for high-level connectivity and captures that data in a cognitive spatial model. Despite limited exploration time, planning in the resultant model is faster and better supports successful travel in a challenging, realistic space.
View paper on