Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMengeROS: a Crowd Simulation Tool for Autonomous Robot Navigation
Paper and Code
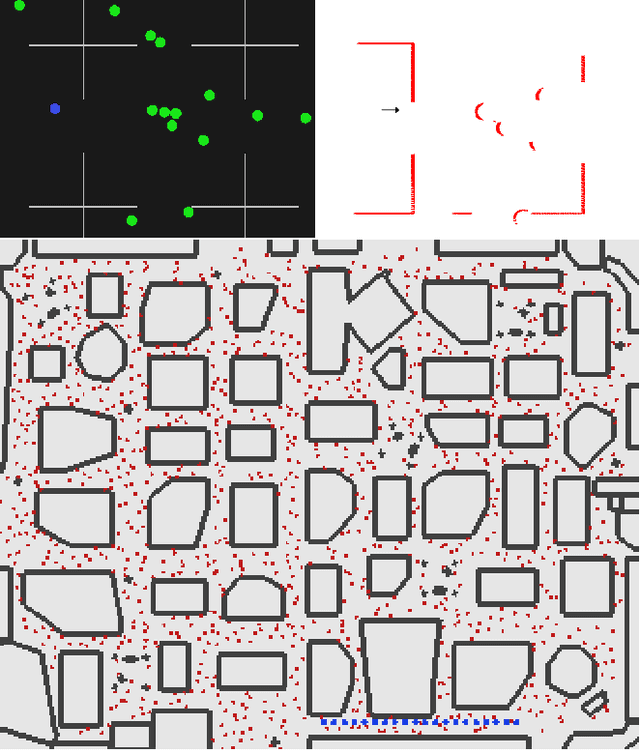
While effective navigation in large, crowded environments is essential for an autonomous robot, preliminary testing of algorithms to support it requires simulation across a broad range of crowd scenarios. Most available simulation tools provide either realistic crowds without robots or realistic robots without realistic crowds. This paper introduces MengeROS, a 2-D simulator that realistically integrates multiple robots and crowds. MengeROS provides a broad range of settings in which to test the capabilities and performance of navigation algorithms designed for large crowded environments.
* In AAAI 2017 Fall symposium on AI for HRI
View paper on