Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWHY: Natural Explanations from a Robot Navigator
Paper and Code
Sep 27, 2017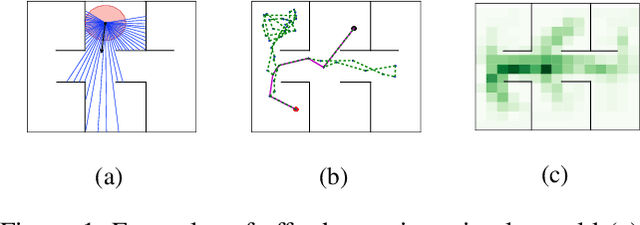
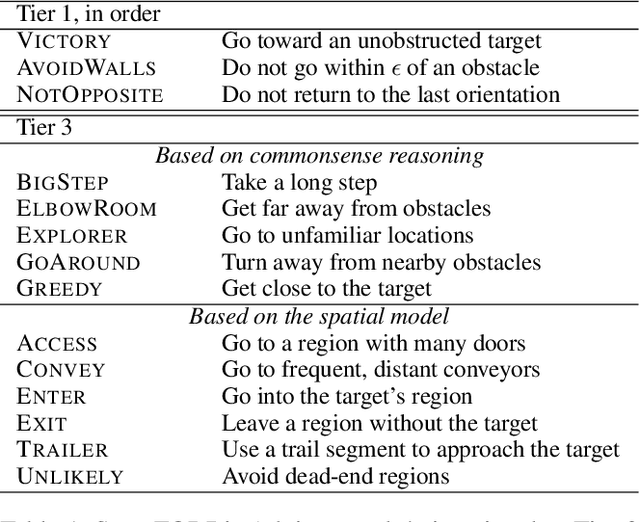
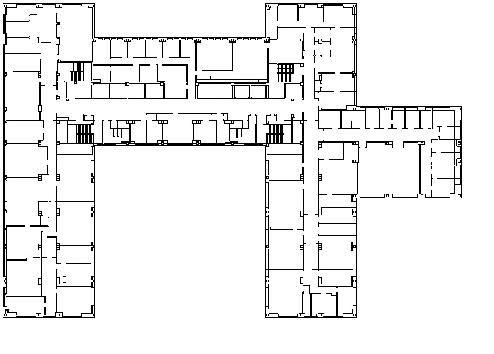
Effective collaboration between a robot and a person requires natural communication. When a robot travels with a human companion, the robot should be able to explain its navigation behavior in natural language. This paper explains how a cognitively-based, autonomous robot navigation system produces informative, intuitive explanations for its decisions. Language generation here is based upon the robot's commonsense, its qualitative reasoning, and its learned spatial model. This approach produces natural explanations in real time for a robot as it navigates in a large, complex indoor environment.
* Accepted at AAAI 2017 Fall Symposium on Natural Communication for
Human-Robot Collaboration
View paper on