 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOneReason Technical Report
Jun 04, 2026Generative recommendation models in the OneRec family have been widely deployed in many real-world services, such as short-video, live-streaming, advertising, and e-commerce. However, these generative models can only benefit from the scaling advantage, while their reasoning ability is hard to activate, since we cannot construct meaningful Chain-of-Thought (CoT) sequences consisting of itemic tokens only. Inspired by the success of the reasoning-style ``think before answer'' paradigm in the LLM field, we conduct preliminary studies (i.e., OneRec-Think, OpenOneRec) to explore reasoning capability in generative recommendation. Nevertheless, we notice an unexpected phenomenon: the thinking mode does not show advantages over the non-thinking mode. Drawing insights from recent findings on CoT robustness in multi-modal language models, we argue that effective reasoning in recommendation rests on two factors: perception, the ability to ground itemic tokens in their underlying language semantics, and cognition, the ability to reorganize a user's behavior sequence into coherent latent interest points. We therefore propose OneReason, which includes: (1) strong itemic token perception in pre-training, (2) a three-level cognition-enhanced CoT format for recommendation tasks in SFT, and (3) a specialize-then-unify training recipe in RL to enhance the thinking ability.
OpenOneRec Technical Report
Dec 31, 2025While the OneRec series has successfully unified the fragmented recommendation pipeline into an end-to-end generative framework, a significant gap remains between recommendation systems and general intelligence. Constrained by isolated data, they operate as domain specialists-proficient in pattern matching but lacking world knowledge, reasoning capabilities, and instruction following. This limitation is further compounded by the lack of a holistic benchmark to evaluate such integrated capabilities. To address this, our contributions are: 1) RecIF Bench & Open Data: We propose RecIF-Bench, a holistic benchmark covering 8 diverse tasks that thoroughly evaluate capabilities from fundamental prediction to complex reasoning. Concurrently, we release a massive training dataset comprising 96 million interactions from 160,000 users to facilitate reproducible research. 2) Framework & Scaling: To ensure full reproducibility, we open-source our comprehensive training pipeline, encompassing data processing, co-pretraining, and post-training. Leveraging this framework, we demonstrate that recommendation capabilities can scale predictably while mitigating catastrophic forgetting of general knowledge. 3) OneRec-Foundation: We release OneRec Foundation (1.7B and 8B), a family of models establishing new state-of-the-art (SOTA) results across all tasks in RecIF-Bench. Furthermore, when transferred to the Amazon benchmark, our models surpass the strongest baselines with an average 26.8% improvement in Recall@10 across 10 diverse datasets (Figure 1). This work marks a step towards building truly intelligent recommender systems. Nonetheless, realizing this vision presents significant technical and theoretical challenges, highlighting the need for broader research engagement in this promising direction.
Centrum: Model-based Database Auto-tuning with Minimal Distributional Assumptions
Oct 26, 2025Gaussian-Process-based Bayesian optimization (GP-BO), is a prevailing model-based framework for DBMS auto-tuning. However, recent work shows GP-BO-based DBMS auto-tuners significantly outperformed auto-tuners based on SMAC, which features random forest surrogate models; such results motivate us to rethink and investigate the limitations of GP-BO in auto-tuner design. We find the fundamental assumptions of GP-BO are widely violated when modeling and optimizing DBMS performance, while tree-ensemble-BOs (e.g., SMAC) can avoid the assumption pitfalls and deliver improved tuning efficiency and effectiveness. Moreover, we argue that existing tree-ensemble-BOs restrict further advancement in DBMS auto-tuning. First, existing tree-ensemble-BOs can only achieve distribution-free point estimates, but still impose unrealistic distributional assumptions on uncertainty estimates, compromising surrogate modeling and distort the acquisition function. Second, recent advances in gradient boosting, which can further enhance surrogate modeling against vanilla GP and random forest counterparts, have rarely been applied in optimizing DBMS auto-tuners. To address these issues, we propose a novel model-based DBMS auto-tuner, Centrum. Centrum improves distribution-free point and interval estimation in surrogate modeling with a two-phase learning procedure of stochastic gradient boosting ensembles. Moreover, Centrum adopts a generalized SGBE-estimated locally-adaptive conformal prediction to facilitate a distribution-free uncertainty estimation and acquisition function. To our knowledge, Centrum is the first auto-tuner to realize distribution-freeness, enhancing BO's practicality in DBMS auto-tuning, and the first to seamlessly fuse gradient boosting ensembles and conformal inference in BO. Extensive physical and simulation experiments on two DBMSs and three workloads show Centrum outperforms 21 SOTA methods.
CLEANet: Robust and Efficient Anomaly Detection in Contaminated Multivariate Time Series
Oct 26, 2025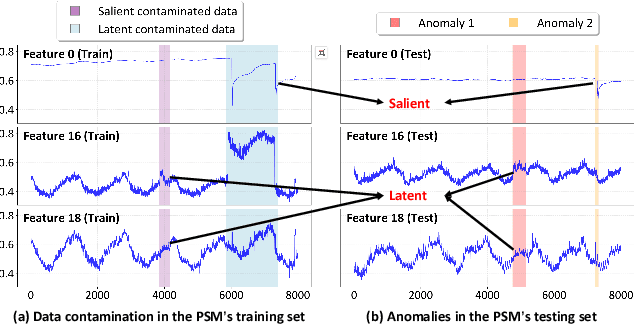
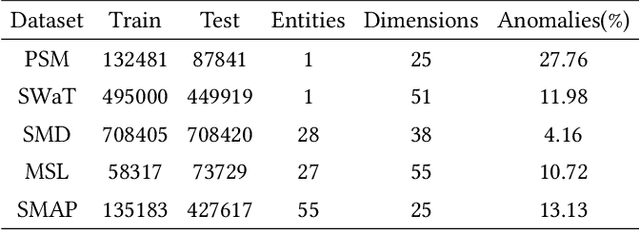
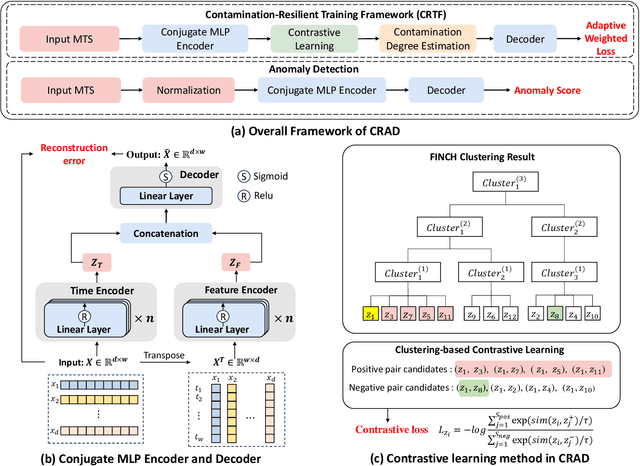
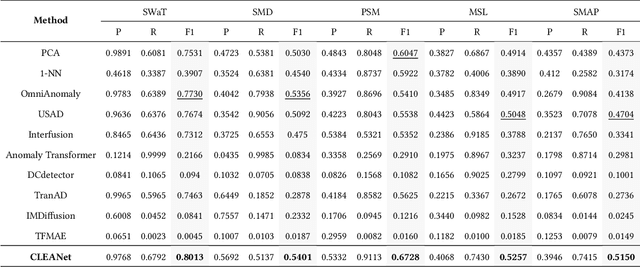
Multivariate time series (MTS) anomaly detection is essential for maintaining the reliability of industrial systems, yet real-world deployment is hindered by two critical challenges: training data contamination (noises and hidden anomalies) and inefficient model inference. Existing unsupervised methods assume clean training data, but contamination distorts learned patterns and degrades detection accuracy. Meanwhile, complex deep models often overfit to contamination and suffer from high latency, limiting practical use. To address these challenges, we propose CLEANet, a robust and efficient anomaly detection framework in contaminated multivariate time series. CLEANet introduces a Contamination-Resilient Training Framework (CRTF) that mitigates the impact of corrupted samples through an adaptive reconstruction weighting strategy combined with clustering-guided contrastive learning, thereby enhancing robustness. To further avoid overfitting on contaminated data and improve computational efficiency, we design a lightweight conjugate MLP that disentangles temporal and cross-feature dependencies. Across five public datasets, CLEANet achieves up to 73.04% higher F1 and 81.28% lower runtime compared with ten state-of-the-art baselines. Furthermore, integrating CRTF into three advanced models yields an average 5.35% F1 gain, confirming its strong generalizability.
OneRec-V2 Technical Report
Aug 28, 2025



Recent breakthroughs in generative AI have transformed recommender systems through end-to-end generation. OneRec reformulates recommendation as an autoregressive generation task, achieving high Model FLOPs Utilization. While OneRec-V1 has shown significant empirical success in real-world deployment, two critical challenges hinder its scalability and performance: (1) inefficient computational allocation where 97.66% of resources are consumed by sequence encoding rather than generation, and (2) limitations in reinforcement learning relying solely on reward models. To address these challenges, we propose OneRec-V2, featuring: (1) Lazy Decoder-Only Architecture: Eliminates encoder bottlenecks, reducing total computation by 94% and training resources by 90%, enabling successful scaling to 8B parameters. (2) Preference Alignment with Real-World User Interactions: Incorporates Duration-Aware Reward Shaping and Adaptive Ratio Clipping to better align with user preferences using real-world feedback. Extensive A/B tests on Kuaishou demonstrate OneRec-V2's effectiveness, improving App Stay Time by 0.467%/0.741% while balancing multi-objective recommendations. This work advances generative recommendation scalability and alignment with real-world feedback, representing a step forward in the development of end-to-end recommender systems.
OmniGen2: Exploration to Advanced Multimodal Generation
Jun 23, 2025In this work, we introduce OmniGen2, a versatile and open-source generative model designed to provide a unified solution for diverse generation tasks, including text-to-image, image editing, and in-context generation. Unlike OmniGen v1, OmniGen2 features two distinct decoding pathways for text and image modalities, utilizing unshared parameters and a decoupled image tokenizer. This design enables OmniGen2 to build upon existing multimodal understanding models without the need to re-adapt VAE inputs, thereby preserving the original text generation capabilities. To facilitate the training of OmniGen2, we developed comprehensive data construction pipelines, encompassing image editing and in-context generation data. Additionally, we introduce a reflection mechanism tailored for image generation tasks and curate a dedicated reflection dataset based on OmniGen2. Despite its relatively modest parameter size, OmniGen2 achieves competitive results on multiple task benchmarks, including text-to-image and image editing. To further evaluate in-context generation, also referred to as subject-driven tasks, we introduce a new benchmark named OmniContext. OmniGen2 achieves state-of-the-art performance among open-source models in terms of consistency. We will release our models, training code, datasets, and data construction pipeline to support future research in this field. Project Page: https://vectorspacelab.github.io/OmniGen2; GitHub Link: https://github.com/VectorSpaceLab/OmniGen2
Speculative MoE: Communication Efficient Parallel MoE Inference with Speculative Token and Expert Pre-scheduling
Mar 07, 2025



MoE (Mixture of Experts) prevails as a neural architecture that can scale modern transformer-based LLMs (Large Language Models) to unprecedented scales. Nevertheless, large MoEs' great demands of computing power, memory capacity and memory bandwidth make scalable serving a fundamental challenge and efficient parallel inference has become a requisite to attain adequate throughput under latency constraints. DeepSpeed-MoE, one state-of-the-art MoE inference framework, adopts a 3D-parallel paradigm including EP (Expert Parallelism), TP (Tensor Parallel) and DP (Data Parallelism). However, our analysis shows DeepSpeed-MoE's inference efficiency is largely bottlenecked by EP, which is implemented with costly all-to-all collectives to route token activation. Our work aims to boost DeepSpeed-MoE by strategically reducing EP's communication overhead with a technique named Speculative MoE. Speculative MoE has two speculative parallelization schemes, speculative token shuffling and speculative expert grouping, which predict outstanding tokens' expert routing paths and pre-schedule tokens and experts across devices to losslessly trim EP's communication volume. Besides DeepSpeed-MoE, we also build Speculative MoE into a prevailing MoE inference engine SGLang. Experiments show Speculative MoE can significantly boost state-of-the-art MoE inference frameworks on fast homogeneous and slow heterogeneous interconnects.
Geometric-Facilitated Denoising Diffusion Model for 3D Molecule Generation
Jan 05, 2024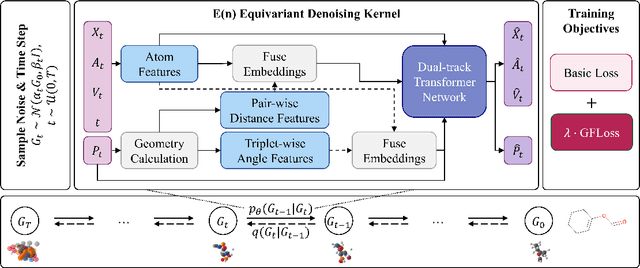
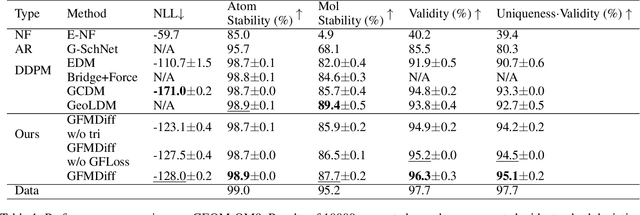
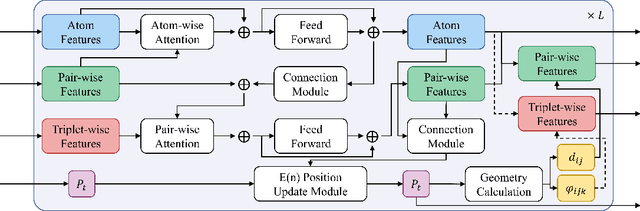
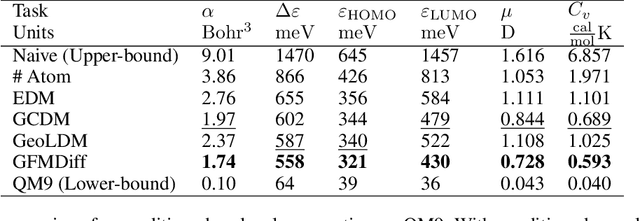
Denoising diffusion models have shown great potential in multiple research areas. Existing diffusion-based generative methods on de novo 3D molecule generation face two major challenges. Since majority heavy atoms in molecules allow connections to multiple atoms through single bonds, solely using pair-wise distance to model molecule geometries is insufficient. Therefore, the first one involves proposing an effective neural network as the denoising kernel that is capable to capture complex multi-body interatomic relationships and learn high-quality features. Due to the discrete nature of graphs, mainstream diffusion-based methods for molecules heavily rely on predefined rules and generate edges in an indirect manner. The second challenge involves accommodating molecule generation to diffusion and accurately predicting the existence of bonds. In our research, we view the iterative way of updating molecule conformations in diffusion process is consistent with molecular dynamics and introduce a novel molecule generation method named Geometric-Facilitated Molecular Diffusion (GFMDiff). For the first challenge, we introduce a Dual-Track Transformer Network (DTN) to fully excevate global spatial relationships and learn high quality representations which contribute to accurate predictions of features and geometries. As for the second challenge, we design Geometric-Facilitated Loss (GFLoss) which intervenes the formation of bonds during the training period, instead of directly embedding edges into the latent space. Comprehensive experiments on current benchmarks demonstrate the superiority of GFMDiff.
Technical Report for Argoverse Challenges on Unified Sensor-based Detection, Tracking, and Forecasting
Nov 27, 2023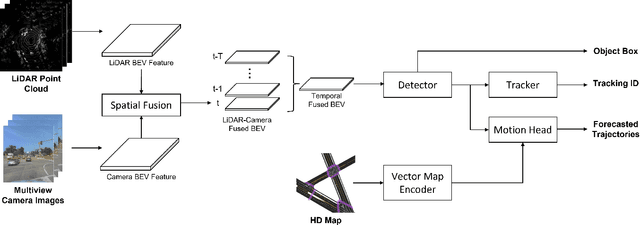
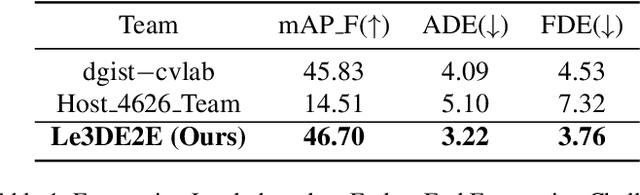
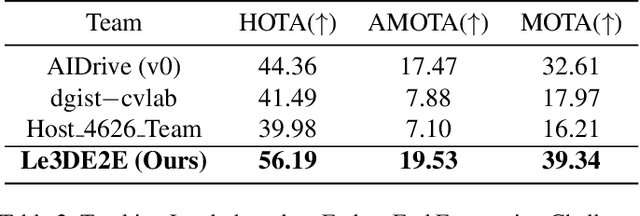
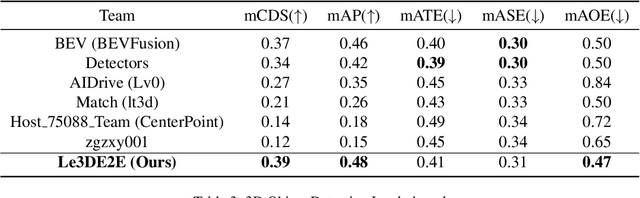
This report presents our Le3DE2E solution for unified sensor-based detection, tracking, and forecasting in Argoverse Challenges at CVPR 2023 Workshop on Autonomous Driving (WAD). We propose a unified network that incorporates three tasks, including detection, tracking, and forecasting. This solution adopts a strong Bird's Eye View (BEV) encoder with spatial and temporal fusion and generates unified representations for multi-tasks. The solution was tested in the Argoverse 2 sensor dataset to evaluate the detection, tracking, and forecasting of 26 object categories. We achieved 1st place in Detection, Tracking, and Forecasting on the E2E Forecasting track in Argoverse Challenges at CVPR 2023 WAD.
Technical Report for Argoverse Challenges on 4D Occupancy Forecasting
Nov 27, 2023This report presents our Le3DE2E_Occ solution for 4D Occupancy Forecasting in Argoverse Challenges at CVPR 2023 Workshop on Autonomous Driving (WAD). Our solution consists of a strong LiDAR-based Bird's Eye View (BEV) encoder with temporal fusion and a two-stage decoder, which combines a DETR head and a UNet decoder. The solution was tested on the Argoverse 2 sensor dataset to evaluate the occupancy state 3 seconds in the future. Our solution achieved 18% lower L1 Error (3.57) than the baseline and got the 1 place on the 4D Occupancy Forecasting task in Argoverse Challenges at CVPR 2023.