 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTechnical Report for Argoverse Challenges on Unified Sensor-based Detection, Tracking, and Forecasting
Nov 27, 2023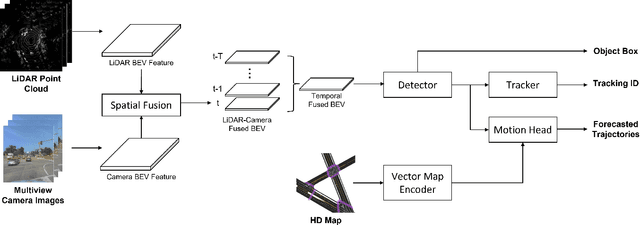
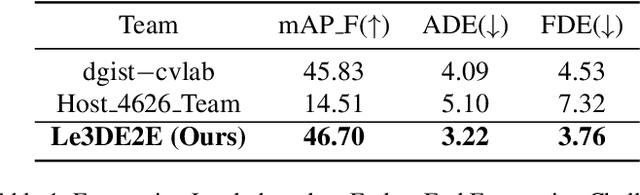
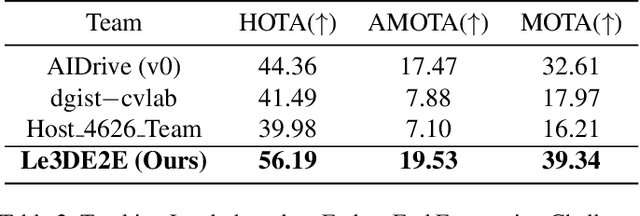
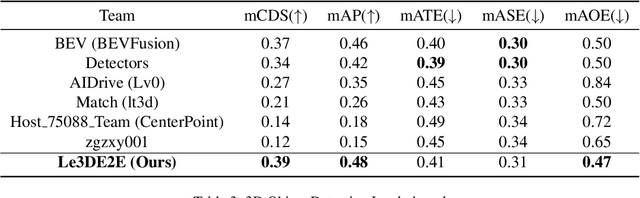
This report presents our Le3DE2E solution for unified sensor-based detection, tracking, and forecasting in Argoverse Challenges at CVPR 2023 Workshop on Autonomous Driving (WAD). We propose a unified network that incorporates three tasks, including detection, tracking, and forecasting. This solution adopts a strong Bird's Eye View (BEV) encoder with spatial and temporal fusion and generates unified representations for multi-tasks. The solution was tested in the Argoverse 2 sensor dataset to evaluate the detection, tracking, and forecasting of 26 object categories. We achieved 1st place in Detection, Tracking, and Forecasting on the E2E Forecasting track in Argoverse Challenges at CVPR 2023 WAD.
Interpretable Tsetlin Machine-based Premature Ventricular Contraction Identification
Jan 20, 2023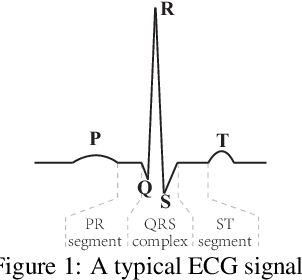


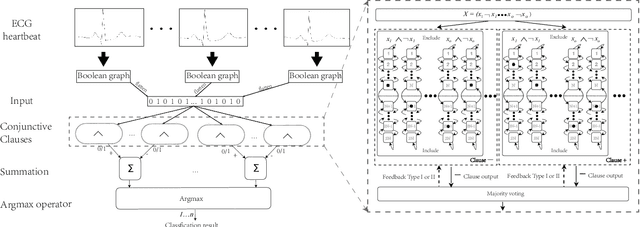
Neural network-based models have found wide use in automatic long-term electrocardiogram (ECG) analysis. However, such black box models are inadequate for analysing physiological signals where credibility and interpretability are crucial. Indeed, how to make ECG analysis transparent is still an open problem. In this study, we develop a Tsetlin machine (TM) based architecture for premature ventricular contraction (PVC) identification by analysing long-term ECG signals. The architecture is transparent by describing patterns directly with logical AND rules. To validate the accuracy of our approach, we compare the TM performance with those of convolutional neural networks (CNNs). Our numerical results demonstrate that TM provides comparable performance with CNNs on the MIT-BIH database. To validate interpretability, we provide explanatory diagrams that show how TM makes the PVC identification from confirming and invalidating patterns. We argue that these are compatible with medical knowledge so that they can be readily understood and verified by a medical doctor. Accordingly, we believe this study paves the way for machine learning (ML) for ECG analysis in clinical practice.
Sensing Urban Land-Use Patterns By Integrating Google Tensorflow And Scene-Classification Models
Aug 04, 2017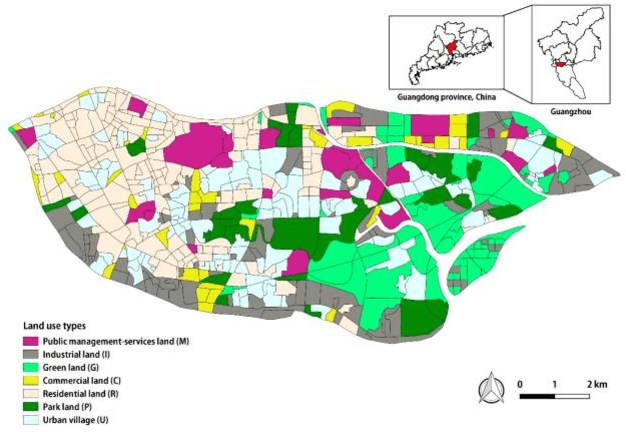
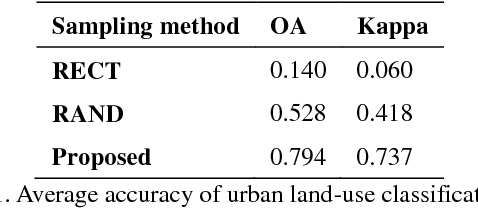

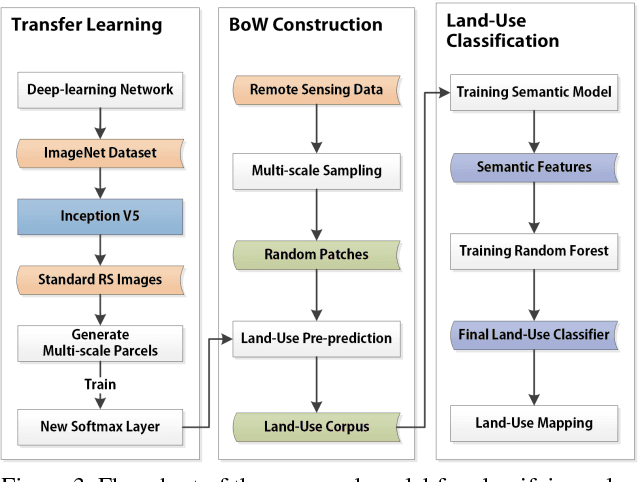
With the rapid progress of China's urbanization, research on the automatic detection of land-use patterns in Chinese cities is of substantial importance. Deep learning is an effective method to extract image features. To take advantage of the deep-learning method in detecting urban land-use patterns, we applied a transfer-learning-based remote-sensing image approach to extract and classify features. Using the Google Tensorflow framework, a powerful convolution neural network (CNN) library was created. First, the transferred model was previously trained on ImageNet, one of the largest object-image data sets, to fully develop the model's ability to generate feature vectors of standard remote-sensing land-cover data sets (UC Merced and WHU-SIRI). Then, a random-forest-based classifier was constructed and trained on these generated vectors to classify the actual urban land-use pattern on the scale of traffic analysis zones (TAZs). To avoid the multi-scale effect of remote-sensing imagery, a large random patch (LRP) method was used. The proposed method could efficiently obtain acceptable accuracy (OA = 0.794, Kappa = 0.737) for the study area. In addition, the results show that the proposed method can effectively overcome the multi-scale effect that occurs in urban land-use classification at the irregular land-parcel level. The proposed method can help planners monitor dynamic urban land use and evaluate the impact of urban-planning schemes.
Extracting urban impervious surface from GF-1 imagery using one-class classifiers
May 13, 2017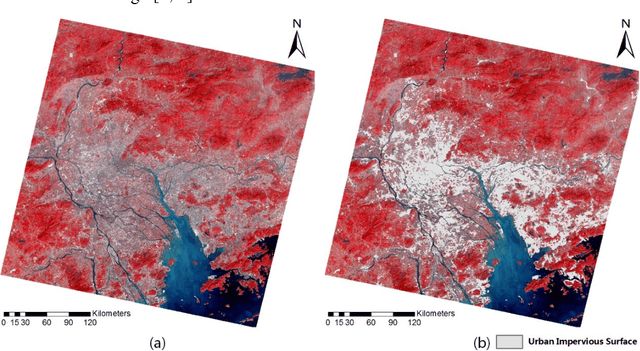
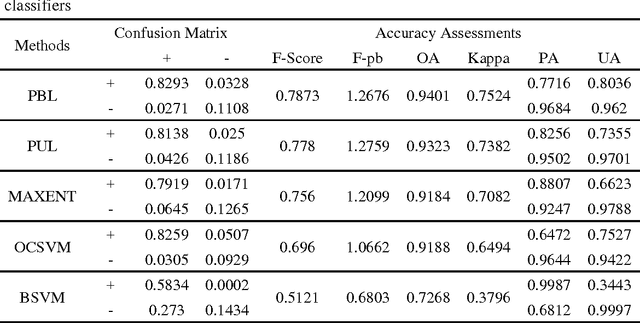
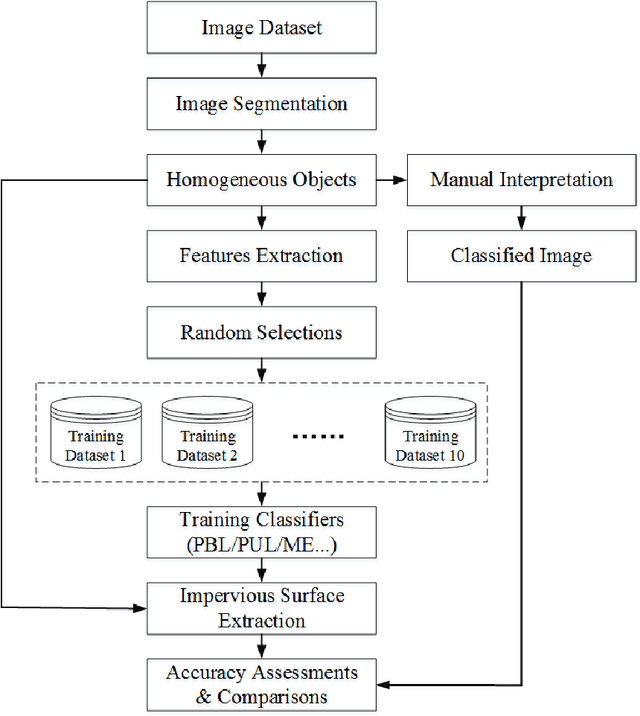
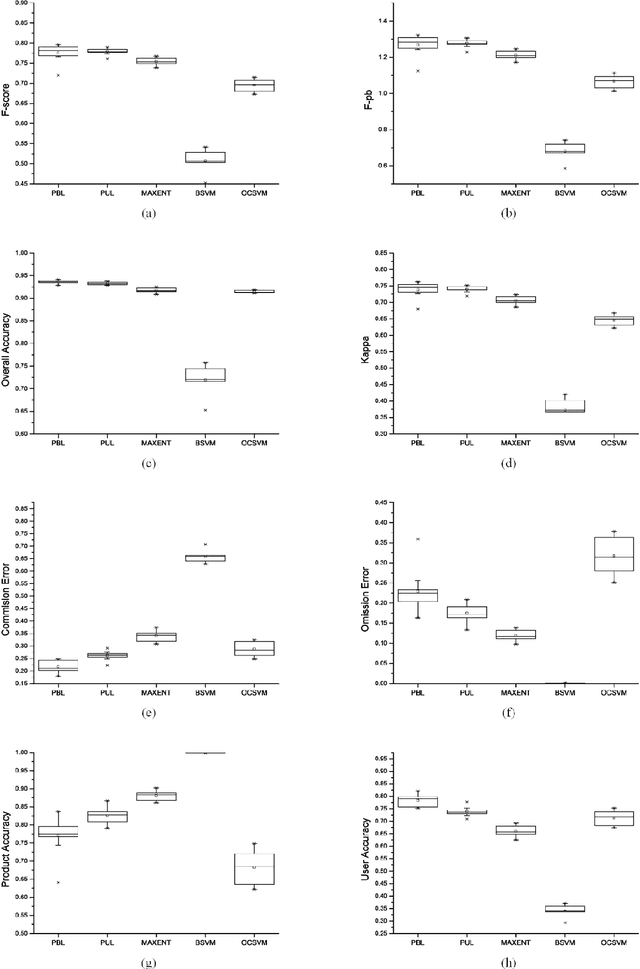
Impervious surface area is a direct consequence of the urbanization, which also plays an important role in urban planning and environmental management. With the rapidly technical development of remote sensing, monitoring urban impervious surface via high spatial resolution (HSR) images has attracted unprecedented attention recently. Traditional multi-classes models are inefficient for impervious surface extraction because it requires labeling all needed and unneeded classes that occur in the image exhaustively. Therefore, we need to find a reliable one-class model to classify one specific land cover type without labeling other classes. In this study, we investigate several one-class classifiers, such as Presence and Background Learning (PBL), Positive Unlabeled Learning (PUL), OCSVM, BSVM and MAXENT, to extract urban impervious surface area using high spatial resolution imagery of GF-1, China's new generation of high spatial remote sensing satellite, and evaluate the classification accuracy based on artificial interpretation results. Compared to traditional multi-classes classifiers (ANN and SVM), the experimental results indicate that PBL and PUL provide higher classification accuracy, which is similar to the accuracy provided by ANN model. Meanwhile, PBL and PUL outperforms OCSVM, BSVM, MAXENT and SVM models. Hence, the one-class classifiers only need a small set of specific samples to train models without losing predictive accuracy, which is supposed to gain more attention on urban impervious surface extraction or other one specific land cover type.