Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTechnical Report for Argoverse Challenges on Unified Sensor-based Detection, Tracking, and Forecasting
Paper and Code
Nov 27, 2023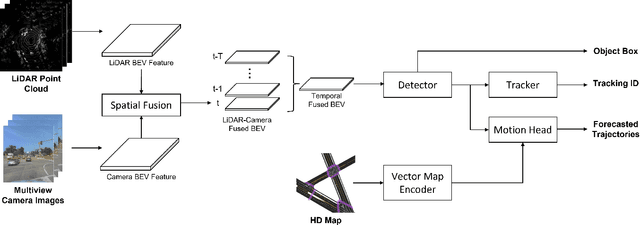
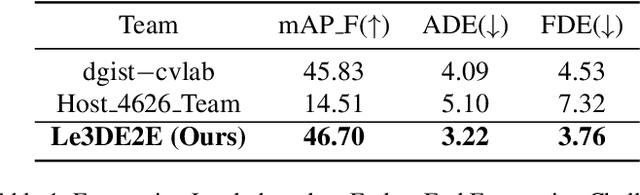
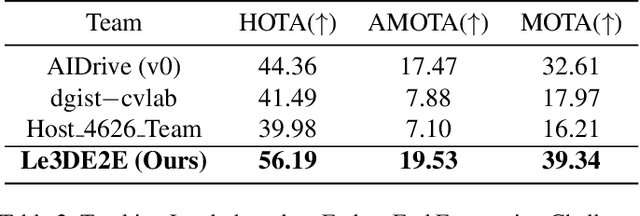
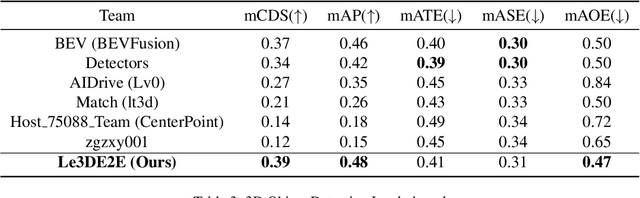
This report presents our Le3DE2E solution for unified sensor-based detection, tracking, and forecasting in Argoverse Challenges at CVPR 2023 Workshop on Autonomous Driving (WAD). We propose a unified network that incorporates three tasks, including detection, tracking, and forecasting. This solution adopts a strong Bird's Eye View (BEV) encoder with spatial and temporal fusion and generates unified representations for multi-tasks. The solution was tested in the Argoverse 2 sensor dataset to evaluate the detection, tracking, and forecasting of 26 object categories. We achieved 1st place in Detection, Tracking, and Forecasting on the E2E Forecasting track in Argoverse Challenges at CVPR 2023 WAD.
View paper on