 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhi-4-reasoning-vision-15B Technical Report
Mar 04, 2026We present Phi-4-reasoning-vision-15B, a compact open-weight multimodal reasoning model, and share the motivations, design choices, experiments, and learnings that informed its development. Our goal is to contribute practical insight to the research community on building smaller, efficient multimodal reasoning models and to share the result of these learnings as an open-weight model that is good at common vision and language tasks and excels at scientific and mathematical reasoning and understanding user interfaces. Our contributions include demonstrating that careful architecture choices and rigorous data curation enable smaller, open-weight multimodal models to achieve competitive performance with significantly less training and inference-time compute and tokens. The most substantial improvements come from systematic filtering, error correction, and synthetic augmentation -- reinforcing that data quality remains the primary lever for model performance. Systematic ablations show that high-resolution, dynamic-resolution encoders yield consistent improvements, as accurate perception is a prerequisite for high-quality reasoning. Finally, a hybrid mix of reasoning and non-reasoning data with explicit mode tokens allows a single model to deliver fast direct answers for simpler tasks and chain-of-thought reasoning for complex problems.
What MLLMs Learn about When they Learn about Multimodal Reasoning: Perception, Reasoning, or their Integration?
Oct 02, 2025Multimodal reasoning models have recently shown promise on challenging domains such as olympiad-level geometry, yet their evaluation remains dominated by aggregate accuracy, a single score that obscures where and how models are improving. We introduce MathLens, a benchmark designed to disentangle the subskills of multimodal reasoning while preserving the complexity of textbook-style geometry problems. The benchmark separates performance into three components: Perception: extracting information from raw inputs, Reasoning: operating on available information, and Integration: selecting relevant perceptual evidence and applying it within reasoning. To support each test, we provide annotations: visual diagrams, textual descriptions to evaluate reasoning in isolation, controlled questions that require both modalities, and probes for fine-grained perceptual skills, all derived from symbolic specifications of the problems to ensure consistency and robustness. Our analysis reveals that different training approaches have uneven effects: First, reinforcement learning chiefly strengthens perception, especially when supported by textual supervision, while textual SFT indirectly improves perception through reflective reasoning. Second, reasoning improves only in tandem with perception. Third, integration remains the weakest capacity, with residual errors concentrated there once other skills advance. Finally, robustness diverges: RL improves consistency under diagram variation, whereas multimodal SFT reduces it through overfitting. We will release all data and experimental logs.
Phi-4-reasoning Technical Report
Apr 30, 2025We introduce Phi-4-reasoning, a 14-billion parameter reasoning model that achieves strong performance on complex reasoning tasks. Trained via supervised fine-tuning of Phi-4 on carefully curated set of "teachable" prompts-selected for the right level of complexity and diversity-and reasoning demonstrations generated using o3-mini, Phi-4-reasoning generates detailed reasoning chains that effectively leverage inference-time compute. We further develop Phi-4-reasoning-plus, a variant enhanced through a short phase of outcome-based reinforcement learning that offers higher performance by generating longer reasoning traces. Across a wide range of reasoning tasks, both models outperform significantly larger open-weight models such as DeepSeek-R1-Distill-Llama-70B model and approach the performance levels of full DeepSeek-R1 model. Our comprehensive evaluations span benchmarks in math and scientific reasoning, coding, algorithmic problem solving, planning, and spatial understanding. Interestingly, we observe a non-trivial transfer of improvements to general-purpose benchmarks as well. In this report, we provide insights into our training data, our training methodologies, and our evaluations. We show that the benefit of careful data curation for supervised fine-tuning (SFT) extends to reasoning language models, and can be further amplified by reinforcement learning (RL). Finally, our evaluation points to opportunities for improving how we assess the performance and robustness of reasoning models.
Inference-Time Scaling for Complex Tasks: Where We Stand and What Lies Ahead
Mar 31, 2025Inference-time scaling can enhance the reasoning capabilities of large language models (LLMs) on complex problems that benefit from step-by-step problem solving. Although lengthening generated scratchpads has proven effective for mathematical tasks, the broader impact of this approach on other tasks remains less clear. In this work, we investigate the benefits and limitations of scaling methods across nine state-of-the-art models and eight challenging tasks, including math and STEM reasoning, calendar planning, NP-hard problems, navigation, and spatial reasoning. We compare conventional models (e.g., GPT-4o) with models fine-tuned for inference-time scaling (e.g., o1) through evaluation protocols that involve repeated model calls, either independently or sequentially with feedback. These evaluations approximate lower and upper performance bounds and potential for future performance improvements for each model, whether through enhanced training or multi-model inference systems. Our extensive empirical analysis reveals that the advantages of inference-time scaling vary across tasks and diminish as problem complexity increases. In addition, simply using more tokens does not necessarily translate to higher accuracy in these challenging regimes. Results from multiple independent runs with conventional models using perfect verifiers show that, for some tasks, these models can achieve performance close to the average performance of today's most advanced reasoning models. However, for other tasks, a significant performance gap remains, even in very high scaling regimes. Encouragingly, all models demonstrate significant gains when inference is further scaled with perfect verifiers or strong feedback, suggesting ample potential for future improvements.
MM-GEN: Enhancing Task Performance Through Targeted Multimodal Data Curation
Jan 07, 2025



Vision-language models (VLMs) are highly effective but often underperform on specialized tasks; for example, Llava-1.5 struggles with chart and diagram understanding due to scarce task-specific training data. Existing training data, sourced from general-purpose datasets, fails to capture the nuanced details needed for these tasks. We introduce MM-Gen, a scalable method that generates task-specific, high-quality synthetic text for candidate images by leveraging stronger models. MM-Gen employs a three-stage targeted process: partitioning data into subgroups, generating targeted text based on task descriptions, and filtering out redundant and outlier data. Fine-tuning VLMs with data generated by MM-Gen leads to significant performance gains, including 29% on spatial reasoning and 15% on diagram understanding for Llava-1.5 (7B). Compared to human-curated caption data, MM-Gen achieves up to 1.6x better improvements for the original models, proving its effectiveness in enhancing task-specific VLM performance and bridging the gap between general-purpose datasets and specialized requirements. Code available at https://github.com/sjoshi804/MM-Gen.
BENCHAGENTS: Automated Benchmark Creation with Agent Interaction
Oct 29, 2024



Evaluations are limited by benchmark availability. As models evolve, there is a need to create benchmarks that can measure progress on new generative capabilities. However, creating new benchmarks through human annotations is slow and expensive, restricting comprehensive evaluations for any capability. We introduce BENCHAGENTS, a framework that methodically leverages large language models (LLMs) to automate benchmark creation for complex capabilities while inherently ensuring data and metric quality. BENCHAGENTS decomposes the benchmark creation process into planning, generation, data verification, and evaluation, each of which is executed by an LLM agent. These agents interact with each other and utilize human-in-the-loop feedback from benchmark developers to explicitly improve and flexibly control data diversity and quality. We use BENCHAGENTS to create benchmarks to evaluate capabilities related to planning and constraint satisfaction during text generation. We then use these benchmarks to study seven state-of-the-art models and extract new insights on common failure modes and model differences.
Unearthing Skill-Level Insights for Understanding Trade-Offs of Foundation Models
Oct 17, 2024



With models getting stronger, evaluations have grown more complex, testing multiple skills in one benchmark and even in the same instance at once. However, skill-wise performance is obscured when inspecting aggregate accuracy, under-utilizing the rich signal modern benchmarks contain. We propose an automatic approach to recover the underlying skills relevant for any evaluation instance, by way of inspecting model-generated rationales. After validating the relevance of rationale-parsed skills and inferring skills for $46$k instances over $12$ benchmarks, we observe many skills to be common across benchmarks, resulting in the curation of hundreds of skill-slices (i.e. sets of instances testing a common skill). Inspecting accuracy over these slices yields novel insights on model trade-offs: e.g., compared to GPT-4o and Claude 3.5 Sonnet, on average, Gemini 1.5 Pro is $18\%$ more accurate in "computing molar mass", but $19\%$ less accurate in "applying constitutional law", despite the overall accuracies of the three models differing by a mere $0.4\%$. Furthermore, we demonstrate the practical utility of our approach by showing that insights derived from skill slice analysis can generalize to held-out instances: when routing each instance to the model strongest on the relevant skills, we see a $3\%$ accuracy improvement over our $12$ dataset corpus. Our skill-slices and framework open a new avenue in model evaluation, leveraging skill-specific analyses to unlock a more granular and actionable understanding of model capabilities.
Eureka: Evaluating and Understanding Large Foundation Models
Sep 13, 2024Rigorous and reproducible evaluation is critical for assessing the state of the art and for guiding scientific advances in Artificial Intelligence. Evaluation is challenging in practice due to several reasons, including benchmark saturation, lack of transparency in methods used for measurement, development challenges in extracting measurements for generative tasks, and, more generally, the extensive number of capabilities required for a well-rounded comparison across models. We make three contributions to alleviate the above challenges. First, we present Eureka, an open-source framework for standardizing evaluations of large foundation models beyond single-score reporting and rankings. Second, we introduce Eureka-Bench as an extensible collection of benchmarks testing capabilities that (i) are still challenging for state-of-the-art models and (ii) represent fundamental but overlooked language and multimodal capabilities. The inherent space for improvement in non-saturated benchmarks enables us to discover meaningful differences between models at a capability level. Third, using Eureka, we conduct an analysis of 12 state-of-the-art models, providing in-depth insights into failure understanding and model comparison, which can be leveraged to plan targeted improvements. In contrast to recent trends in reports and leaderboards showing absolute rankings and claims for one model or another to be the best, our analysis shows that there is no such best model. Different models have different strengths, but there are models that appear more often than others as best performers for some capabilities. Despite the recent improvements, current models still struggle with several fundamental capabilities including detailed image understanding, benefiting from multimodal input when available rather than fully relying on language, factuality and grounding for information retrieval, and over refusals.
Is A Picture Worth A Thousand Words? Delving Into Spatial Reasoning for Vision Language Models
Jun 21, 2024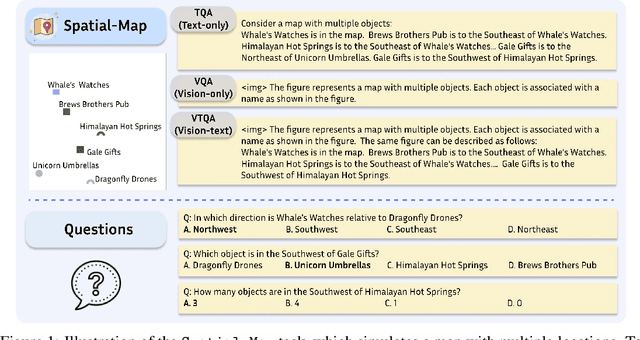
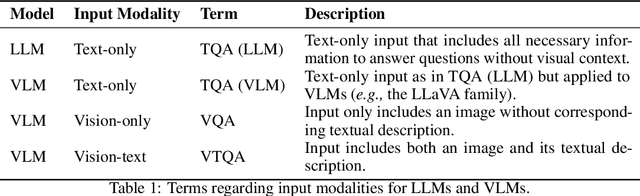
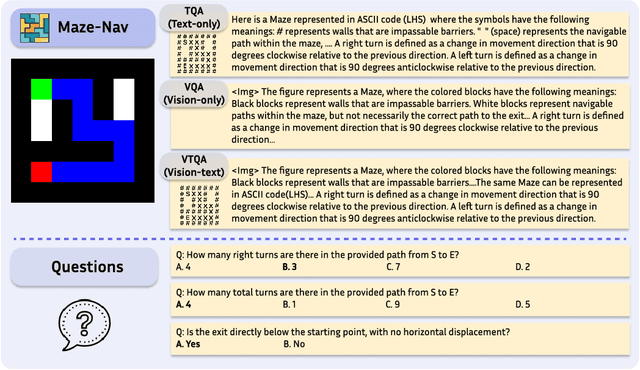
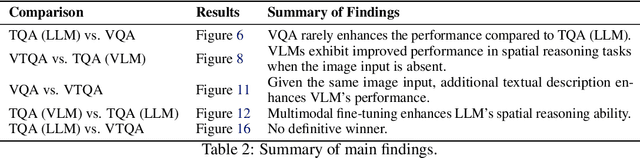
Large language models (LLMs) and vision-language models (VLMs) have demonstrated remarkable performance across a wide range of tasks and domains. Despite this promise, spatial understanding and reasoning -- a fundamental component of human cognition -- remains under-explored. We develop novel benchmarks that cover diverse aspects of spatial reasoning such as relationship understanding, navigation, and counting. We conduct a comprehensive evaluation of competitive language and vision-language models. Our findings reveal several counter-intuitive insights that have been overlooked in the literature: (1) Spatial reasoning poses significant challenges where competitive models can fall behind random guessing; (2) Despite additional visual input, VLMs often under-perform compared to their LLM counterparts; (3) When both textual and visual information is available, multi-modal language models become less reliant on visual information if sufficient textual clues are provided. Additionally, we demonstrate that leveraging redundancy between vision and text can significantly enhance model performance. We hope our study will inform the development of multimodal models to improve spatial intelligence and further close the gap with human intelligence.
HoloAssist: an Egocentric Human Interaction Dataset for Interactive AI Assistants in the Real World
Sep 29, 2023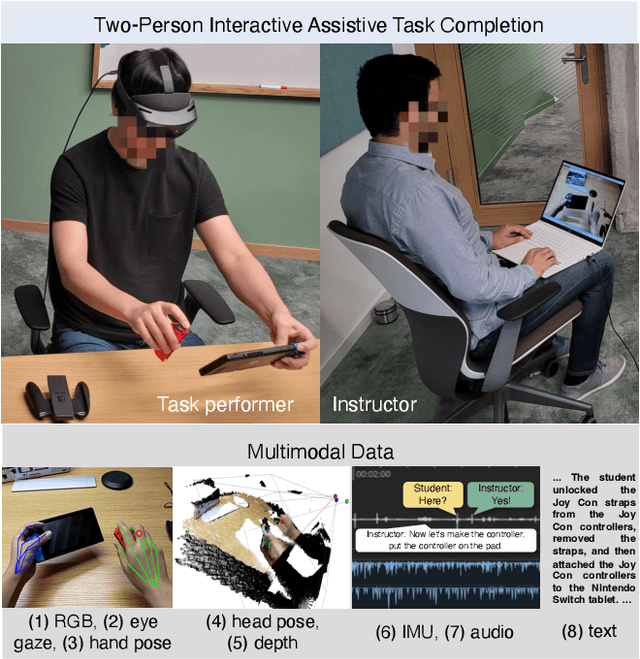

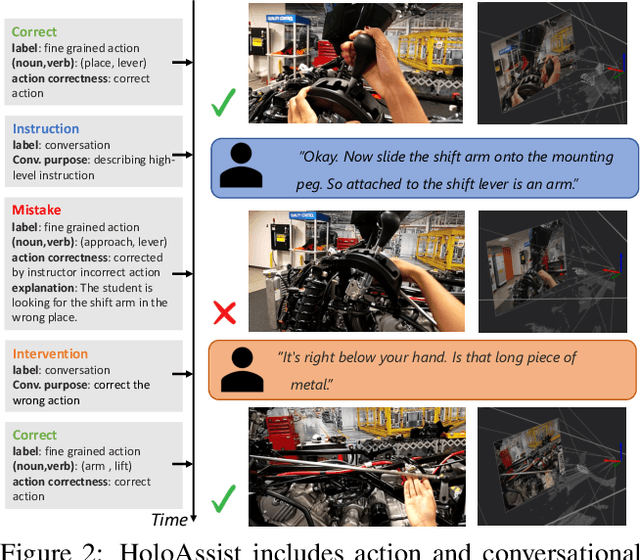

Building an interactive AI assistant that can perceive, reason, and collaborate with humans in the real world has been a long-standing pursuit in the AI community. This work is part of a broader research effort to develop intelligent agents that can interactively guide humans through performing tasks in the physical world. As a first step in this direction, we introduce HoloAssist, a large-scale egocentric human interaction dataset, where two people collaboratively complete physical manipulation tasks. The task performer executes the task while wearing a mixed-reality headset that captures seven synchronized data streams. The task instructor watches the performer's egocentric video in real time and guides them verbally. By augmenting the data with action and conversational annotations and observing the rich behaviors of various participants, we present key insights into how human assistants correct mistakes, intervene in the task completion procedure, and ground their instructions to the environment. HoloAssist spans 166 hours of data captured by 350 unique instructor-performer pairs. Furthermore, we construct and present benchmarks on mistake detection, intervention type prediction, and hand forecasting, along with detailed analysis. We expect HoloAssist will provide an important resource for building AI assistants that can fluidly collaborate with humans in the real world. Data can be downloaded at https://holoassist.github.io/.