 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObjaverse++: Curated 3D Object Dataset with Quality Annotations
Apr 09, 2025This paper presents Objaverse++, a curated subset of Objaverse enhanced with detailed attribute annotations by human experts. Recent advances in 3D content generation have been driven by large-scale datasets such as Objaverse, which contains over 800,000 3D objects collected from the Internet. Although Objaverse represents the largest available 3D asset collection, its utility is limited by the predominance of low-quality models. To address this limitation, we manually annotate 10,000 3D objects with detailed attributes, including aesthetic quality scores, texture color classifications, multi-object composition flags, transparency characteristics, etc. Then, we trained a neural network capable of annotating the tags for the rest of the Objaverse dataset. Through experiments and a user study on generation results, we demonstrate that models pre-trained on our quality-focused subset achieve better performance than those trained on the larger dataset of Objaverse in image-to-3D generation tasks. In addition, by comparing multiple subsets of training data filtered by our tags, our results show that the higher the data quality, the faster the training loss converges. These findings suggest that careful curation and rich annotation can compensate for the raw dataset size, potentially offering a more efficient path to develop 3D generative models. We release our enhanced dataset of approximately 500,000 curated 3D models to facilitate further research on various downstream tasks in 3D computer vision. In the near future, we aim to extend our annotations to cover the entire Objaverse dataset.
Graph Pseudotime Analysis and Neural Stochastic Differential Equations for Analyzing Retinal Degeneration Dynamics and Beyond
Feb 10, 2025
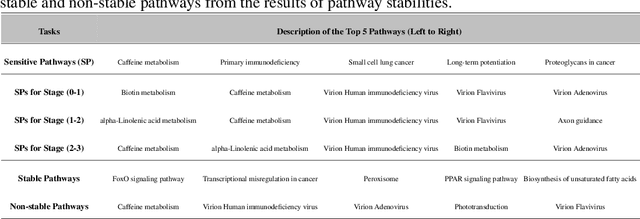


Understanding disease progression at the molecular pathway level usually requires capturing both structural dependencies between pathways and the temporal dynamics of disease evolution. In this work, we solve the former challenge by developing a biologically informed graph-forming method to efficiently construct pathway graphs for subjects from our newly curated JR5558 mouse transcriptomics dataset. We then develop Graph-level Pseudotime Analysis (GPA) to infer graph-level trajectories that reveal how disease progresses at the population level, rather than in individual subjects. Based on the trajectories estimated by GPA, we identify the most sensitive pathways that drive disease stage transitions. In addition, we measure changes in pathway features using neural stochastic differential equations (SDEs), which enables us to formally define and compute pathway stability and disease bifurcation points (points of no return), two fundamental problems in disease progression research. We further extend our theory to the case when pathways can interact with each other, enabling a more comprehensive and multi-faceted characterization of disease phenotypes. The comprehensive experimental results demonstrate the effectiveness of our framework in reconstructing the dynamics of the pathway, identifying critical transitions, and providing novel insights into the mechanistic understanding of disease evolution.
Machine Learning-Based Prediction of Key Genes Correlated to the Subretinal Lesion Severity in a Mouse Model of Age-Related Macular Degeneration
Sep 08, 2024



Age-related macular degeneration (AMD) is a major cause of blindness in older adults, severely affecting vision and quality of life. Despite advances in understanding AMD, the molecular factors driving the severity of subretinal scarring (fibrosis) remain elusive, hampering the development of effective therapies. This study introduces a machine learning-based framework to predict key genes that are strongly correlated with lesion severity and to identify potential therapeutic targets to prevent subretinal fibrosis in AMD. Using an original RNA sequencing (RNA-seq) dataset from the diseased retinas of JR5558 mice, we developed a novel and specific feature engineering technique, including pathway-based dimensionality reduction and gene-based feature expansion, to enhance prediction accuracy. Two iterative experiments were conducted by leveraging Ridge and ElasticNet regression models to assess biological relevance and gene impact. The results highlight the biological significance of several key genes and demonstrate the framework's effectiveness in identifying novel therapeutic targets. The key findings provide valuable insights for advancing drug discovery efforts and improving treatment strategies for AMD, with the potential to enhance patient outcomes by targeting the underlying genetic mechanisms of subretinal lesion development.
Experience-Based Evolutionary Algorithms for Expensive Optimization
Apr 09, 2023



Optimization algorithms are very different from human optimizers. A human being would gain more experiences through problem-solving, which helps her/him in solving a new unseen problem. Yet an optimization algorithm never gains any experiences by solving more problems. In recent years, efforts have been made towards endowing optimization algorithms with some abilities of experience learning, which is regarded as experience-based optimization. In this paper, we argue that hard optimization problems could be tackled efficiently by making better use of experiences gained in related problems. We demonstrate our ideas in the context of expensive optimization, where we aim to find a near-optimal solution to an expensive optimization problem with as few fitness evaluations as possible. To achieve this, we propose an experience-based surrogate-assisted evolutionary algorithm (SAEA) framework to enhance the optimization efficiency of expensive problems, where experiences are gained across related expensive tasks via a novel meta-learning method. These experiences serve as the task-independent parameters of a deep kernel learning surrogate, then the solutions sampled from the target task are used to adapt task-specific parameters for the surrogate. With the help of experience learning, competitive regression-based surrogates can be initialized using only 1$d$ solutions from the target task ($d$ is the dimension of the decision space). Our experimental results on expensive multi-objective and constrained optimization problems demonstrate that experiences gained from related tasks are beneficial for the saving of evaluation budgets on the target problem.
Integrating features from lymph node stations for metastatic lymph node detection
Jan 09, 2023Metastasis on lymph nodes (LNs), the most common way of spread for primary tumor cells, is a sign of increased mortality. However, metastatic LNs are time-consuming and challenging to detect even for professional radiologists due to their small sizes, high sparsity, and ambiguity in appearance. It is desired to leverage recent development in deep learning to automatically detect metastatic LNs. Besides a two-stage detection network, we here introduce an additional branch to leverage information about LN stations, an important reference for radiologists during metastatic LN diagnosis, as supplementary information for metastatic LN detection. The branch targets to solve a closely related task on the LN station level, i.e., classifying whether an LN station contains metastatic LN or not, so as to learn representations for LN stations. Considering that a metastatic LN station is expected to significantly affect the nearby ones, a GCN-based structure is adopted by the branch to model the relationship among different LN stations. At the classification stage of metastatic LN detection, the above learned LN station features, as well as the features reflecting the distance between the LN candidate and the LN stations, are integrated with the LN features. We validate our method on a dataset containing 114 intravenous contrast-enhanced Computed Tomography (CT) images of oral squamous cell carcinoma (OSCC) patients and show that it outperforms several state-of-the-art methods on the mFROC, maxF1, and AUC scores,respectively.
A multi-objective optimization framework for on-line ridesharing systems
Dec 07, 2020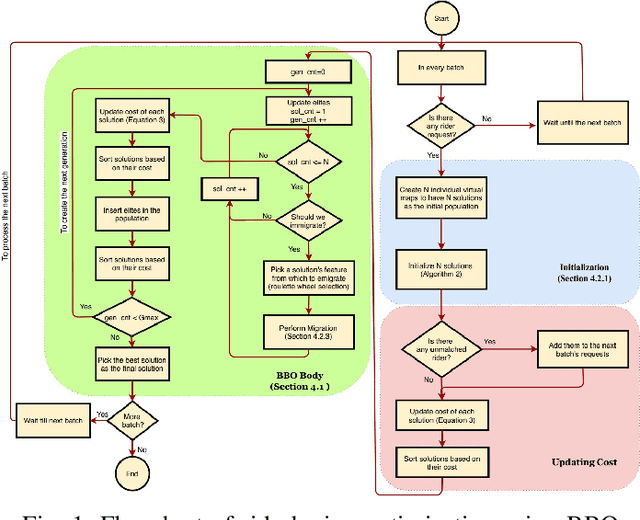
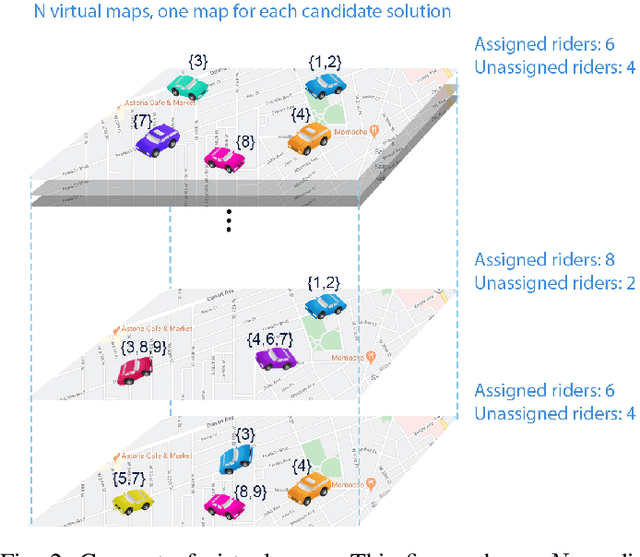
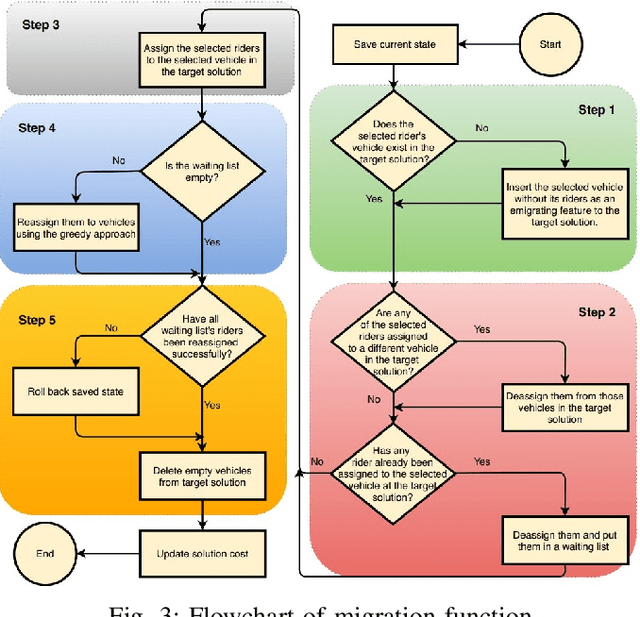
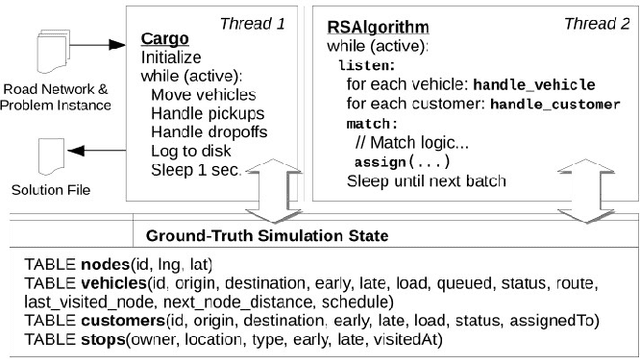
The ultimate goal of ridesharing systems is to matchtravelers who do not have a vehicle with those travelers whowant to share their vehicle. A good match can be found amongthose who have similar itineraries and time schedules. In thisway each rider can be served without any delay and also eachdriver can earn as much as possible without having too muchdeviation from their original route. We propose an algorithmthat leverages biogeography-based optimization to solve a multi-objective optimization problem for online ridesharing. It isnecessary to solve the ridesharing problem as a multi-objectiveproblem since there are some important objectives that must beconsidered simultaneously. We test our algorithm by evaluatingperformance on the Beijing ridesharing dataset. The simulationresults indicate that BBO provides competitive performancerelative to state-of-the-art ridesharing optimization algorithms.
Interpretable-AI Policies using Evolutionary Nonlinear Decision Trees for Discrete Action Systems
Sep 20, 2020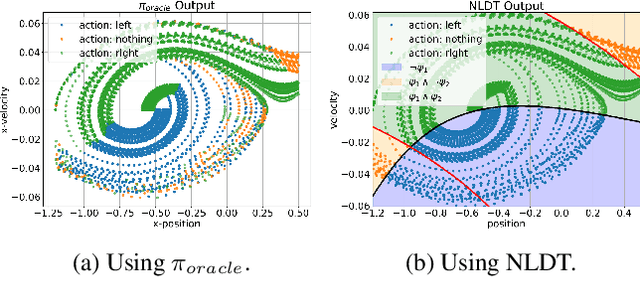

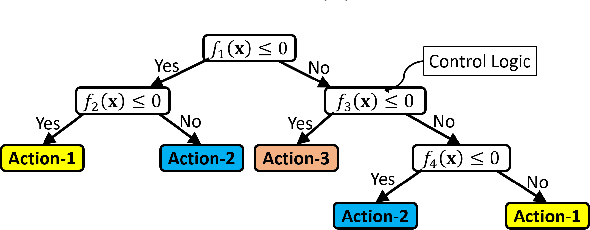

Black-box artificial intelligence (AI) induction methods such as deep reinforcement learning (DRL) are increasingly being used to find optimal policies for a given control task. Although policies represented using a black-box AI are capable of efficiently executing the underlying control task and achieving optimal closed-loop performance -- controlling the agent from initial time step until the successful termination of an episode, the developed control rules are often complex and neither interpretable nor explainable. In this paper, we use a recently proposed nonlinear decision-tree (NLDT) approach to find a hierarchical set of control rules in an attempt to maximize the open-loop performance for approximating and explaining the pre-trained black-box DRL (oracle) agent using the labelled state-action dataset. Recent advances in nonlinear optimization approaches using evolutionary computation facilitates finding a hierarchical set of nonlinear control rules as a function of state variables using a computationally fast bilevel optimization procedure at each node of the proposed NLDT. Additionally, we propose a re-optimization procedure for enhancing closed-loop performance of an already derived NLDT. We evaluate our proposed methodologies on four different control problems having two to four discrete actions. In all these problems our proposed approach is able to find simple and interpretable rules involving one to four non-linear terms per rule, while simultaneously achieving on par closed-loop performance when compared to a trained black-box DRL agent. The obtained results are inspiring as they suggest the replacement of complicated black-box DRL policies involving thousands of parameters (making them non-interpretable) with simple interpretable policies. Results are encouraging and motivating to pursue further applications of proposed approach in solving more complex control tasks.