 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObjaverse++: Curated 3D Object Dataset with Quality Annotations
Apr 09, 2025This paper presents Objaverse++, a curated subset of Objaverse enhanced with detailed attribute annotations by human experts. Recent advances in 3D content generation have been driven by large-scale datasets such as Objaverse, which contains over 800,000 3D objects collected from the Internet. Although Objaverse represents the largest available 3D asset collection, its utility is limited by the predominance of low-quality models. To address this limitation, we manually annotate 10,000 3D objects with detailed attributes, including aesthetic quality scores, texture color classifications, multi-object composition flags, transparency characteristics, etc. Then, we trained a neural network capable of annotating the tags for the rest of the Objaverse dataset. Through experiments and a user study on generation results, we demonstrate that models pre-trained on our quality-focused subset achieve better performance than those trained on the larger dataset of Objaverse in image-to-3D generation tasks. In addition, by comparing multiple subsets of training data filtered by our tags, our results show that the higher the data quality, the faster the training loss converges. These findings suggest that careful curation and rich annotation can compensate for the raw dataset size, potentially offering a more efficient path to develop 3D generative models. We release our enhanced dataset of approximately 500,000 curated 3D models to facilitate further research on various downstream tasks in 3D computer vision. In the near future, we aim to extend our annotations to cover the entire Objaverse dataset.
Online Connectivity-aware Dynamic Deployment for Heterogeneous Multi-Robot Systems
Dec 18, 2020

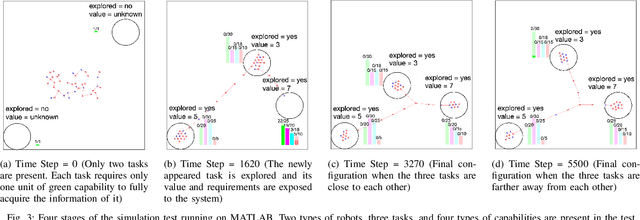
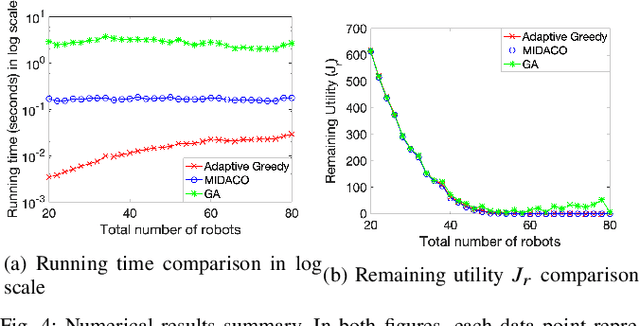
In this paper, we consider the dynamic multi-robot distribution problem where a heterogeneous group of networked robots is tasked to spread out and simultaneously move towards multiple moving task areas while maintaining connectivity. The heterogeneity of the system is characterized by various categories of units and each robot carries different numbers of units per category representing heterogeneous capabilities. Every task area with different importance demands a total number of units contributed by all of the robots within its area. Moreover, we assume the importance and the total number of units requested from each task area is initially unknown. The robots need first to explore, i.e., reach those areas, and then be allocated to the tasks so to fulfill the requirements. The multi-robot distribution problem is formulated as designing controllers to distribute the robots that maximize the overall task fulfillment while minimizing the traveling costs in presence of connectivity constraints. We propose a novel connectivity-aware multi-robot redistribution approach that accounts for dynamic task allocation and connectivity maintenance for a heterogeneous robot team. Such an approach could generate sub-optimal robot controllers so that the amount of total unfulfilled requirements of the tasks weighted by their importance is minimized and robots stay connected at all times. Simulation and numerical results are provided to demonstrate the effectiveness of the proposed approaches.