 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniMo: Unified Motion Generation and Understanding with Chain of Thought
Jan 17, 2026Existing 3D human motion generation and understanding methods often exhibit limited interpretability, restricting effective mutual enhancement between these inherently related tasks. While current unified frameworks based on large language models (LLMs) leverage linguistic priors, they frequently encounter challenges in semantic alignment and task coherence. Moreover, the next-token prediction paradigm in LLMs is ill-suited for motion sequences, causing cumulative prediction errors. To address these limitations, we propose UniMo, a novel framework that integrates motion-language information and interpretable chain of thought (CoT) reasoning into the LLM via supervised fine-tuning (SFT). We further introduce reinforcement learning with Group Relative Policy Optimization (GRPO) as a post-training strategy that optimizes over groups of tokens to enforce structural correctness and semantic alignment, mitigating cumulative errors in motion token prediction. Extensive experiments demonstrate that UniMo significantly outperforms existing unified and task-specific models, achieving state-of-the-art performance in both motion generation and understanding.
xbench: Tracking Agents Productivity Scaling with Profession-Aligned Real-World Evaluations
Jun 16, 2025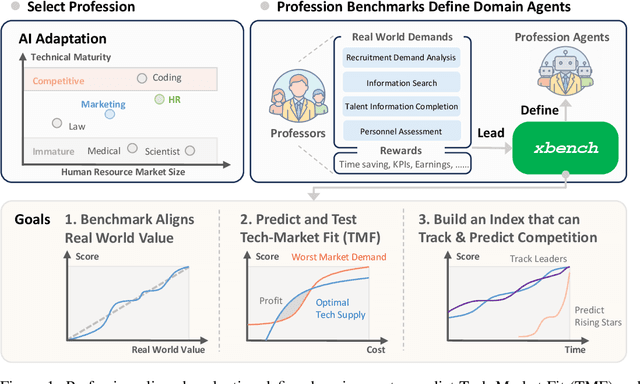
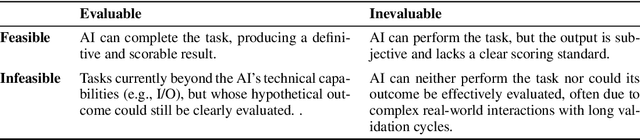
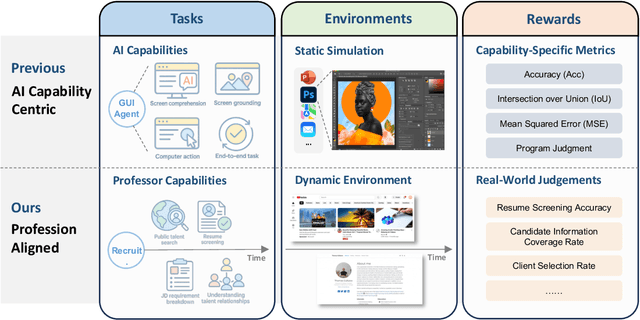
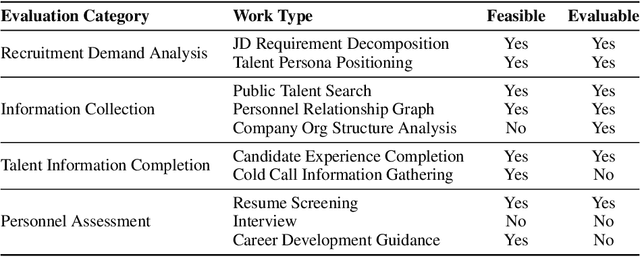
We introduce xbench, a dynamic, profession-aligned evaluation suite designed to bridge the gap between AI agent capabilities and real-world productivity. While existing benchmarks often focus on isolated technical skills, they may not accurately reflect the economic value agents deliver in professional settings. To address this, xbench targets commercially significant domains with evaluation tasks defined by industry professionals. Our framework creates metrics that strongly correlate with productivity value, enables prediction of Technology-Market Fit (TMF), and facilitates tracking of product capabilities over time. As our initial implementations, we present two benchmarks: Recruitment and Marketing. For Recruitment, we collect 50 tasks from real-world headhunting business scenarios to evaluate agents' abilities in company mapping, information retrieval, and talent sourcing. For Marketing, we assess agents' ability to match influencers with advertiser needs, evaluating their performance across 50 advertiser requirements using a curated pool of 836 candidate influencers. We present initial evaluation results for leading contemporary agents, establishing a baseline for these professional domains. Our continuously updated evalsets and evaluations are available at https://xbench.org.
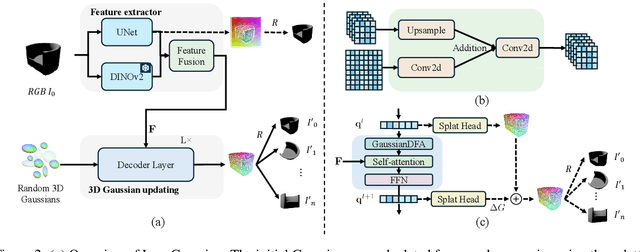
UniG: Modelling Unitary 3D Gaussians for View-consistent 3D Reconstruction
Oct 17, 2024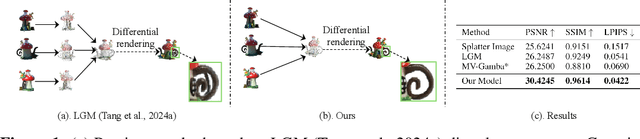
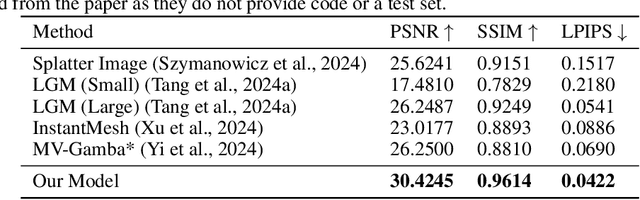
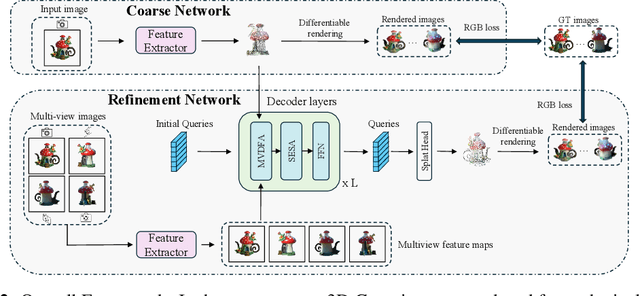
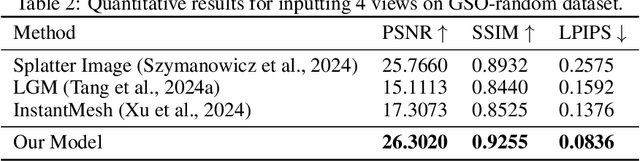
In this work, we present UniG, a view-consistent 3D reconstruction and novel view synthesis model that generates a high-fidelity representation of 3D Gaussians from sparse images. Existing 3D Gaussians-based methods usually regress Gaussians per-pixel of each view, create 3D Gaussians per view separately, and merge them through point concatenation. Such a view-independent reconstruction approach often results in a view inconsistency issue, where the predicted positions of the same 3D point from different views may have discrepancies. To address this problem, we develop a DETR (DEtection TRansformer)-like framework, which treats 3D Gaussians as decoder queries and updates their parameters layer by layer by performing multi-view cross-attention (MVDFA) over multiple input images. In this way, multiple views naturally contribute to modeling a unitary representation of 3D Gaussians, thereby making 3D reconstruction more view-consistent. Moreover, as the number of 3D Gaussians used as decoder queries is irrespective of the number of input views, allow an arbitrary number of input images without causing memory explosion. Extensive experiments validate the advantages of our approach, showcasing superior performance over existing methods quantitatively (improving PSNR by 4.2 dB when trained on Objaverse and tested on the GSO benchmark) and qualitatively.
DIG3D: Marrying Gaussian Splatting with Deformable Transformer for Single Image 3D Reconstruction
Apr 25, 2024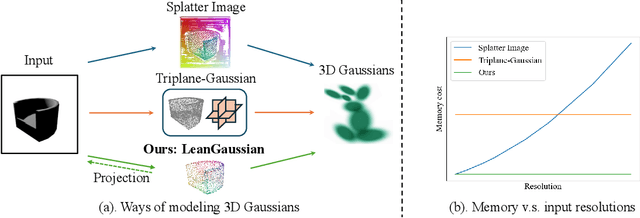


In this paper, we study the problem of 3D reconstruction from a single-view RGB image and propose a novel approach called DIG3D for 3D object reconstruction and novel view synthesis. Our method utilizes an encoder-decoder framework which generates 3D Gaussians in decoder with the guidance of depth-aware image features from encoder. In particular, we introduce the use of deformable transformer, allowing efficient and effective decoding through 3D reference point and multi-layer refinement adaptations. By harnessing the benefits of 3D Gaussians, our approach offers an efficient and accurate solution for 3D reconstruction from single-view images. We evaluate our method on the ShapeNet SRN dataset, getting PSNR of 24.21 and 24.98 in car and chair dataset, respectively. The result outperforming the recent method by around 2.25%, demonstrating the effectiveness of our method in achieving superior results.
MVHumanNet: A Large-scale Dataset of Multi-view Daily Dressing Human Captures
Dec 05, 2023
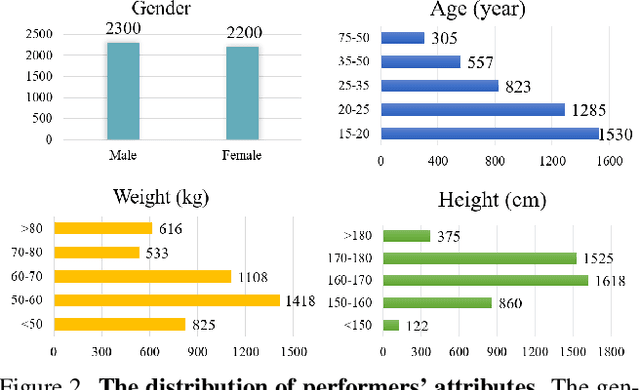
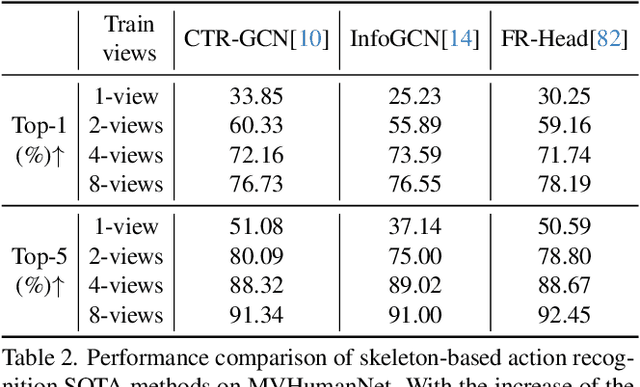

In this era, the success of large language models and text-to-image models can be attributed to the driving force of large-scale datasets. However, in the realm of 3D vision, while remarkable progress has been made with models trained on large-scale synthetic and real-captured object data like Objaverse and MVImgNet, a similar level of progress has not been observed in the domain of human-centric tasks partially due to the lack of a large-scale human dataset. Existing datasets of high-fidelity 3D human capture continue to be mid-sized due to the significant challenges in acquiring large-scale high-quality 3D human data. To bridge this gap, we present MVHumanNet, a dataset that comprises multi-view human action sequences of 4,500 human identities. The primary focus of our work is on collecting human data that features a large number of diverse identities and everyday clothing using a multi-view human capture system, which facilitates easily scalable data collection. Our dataset contains 9,000 daily outfits, 60,000 motion sequences and 645 million frames with extensive annotations, including human masks, camera parameters, 2D and 3D keypoints, SMPL/SMPLX parameters, and corresponding textual descriptions. To explore the potential of MVHumanNet in various 2D and 3D visual tasks, we conducted pilot studies on view-consistent action recognition, human NeRF reconstruction, text-driven view-unconstrained human image generation, as well as 2D view-unconstrained human image and 3D avatar generation. Extensive experiments demonstrate the performance improvements and effective applications enabled by the scale provided by MVHumanNet. As the current largest-scale 3D human dataset, we hope that the release of MVHumanNet data with annotations will foster further innovations in the domain of 3D human-centric tasks at scale.