 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmniBooth: Learning Latent Control for Image Synthesis with Multi-modal Instruction
Oct 07, 2024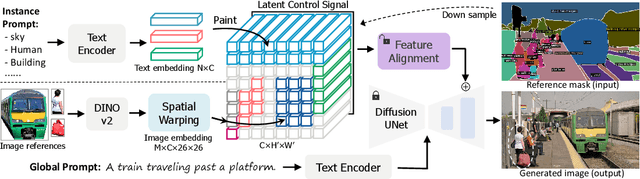
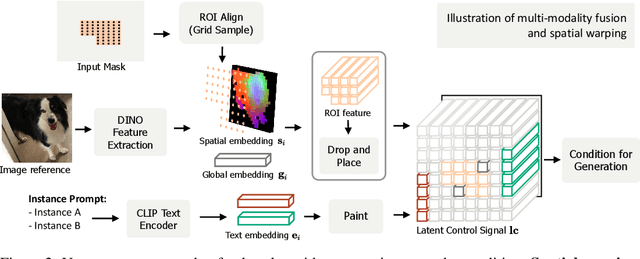
We present OmniBooth, an image generation framework that enables spatial control with instance-level multi-modal customization. For all instances, the multimodal instruction can be described through text prompts or image references. Given a set of user-defined masks and associated text or image guidance, our objective is to generate an image, where multiple objects are positioned at specified coordinates and their attributes are precisely aligned with the corresponding guidance. This approach significantly expands the scope of text-to-image generation, and elevates it to a more versatile and practical dimension in controllability. In this paper, our core contribution lies in the proposed latent control signals, a high-dimensional spatial feature that provides a unified representation to integrate the spatial, textual, and image conditions seamlessly. The text condition extends ControlNet to provide instance-level open-vocabulary generation. The image condition further enables fine-grained control with personalized identity. In practice, our method empowers users with more flexibility in controllable generation, as users can choose multi-modal conditions from text or images as needed. Furthermore, thorough experiments demonstrate our enhanced performance in image synthesis fidelity and alignment across different tasks and datasets. Project page: https://len-li.github.io/omnibooth-web/
Lotus: Diffusion-based Visual Foundation Model for High-quality Dense Prediction
Sep 26, 2024



Leveraging the visual priors of pre-trained text-to-image diffusion models offers a promising solution to enhance zero-shot generalization in dense prediction tasks. However, existing methods often uncritically use the original diffusion formulation, which may not be optimal due to the fundamental differences between dense prediction and image generation. In this paper, we provide a systemic analysis of the diffusion formulation for the dense prediction, focusing on both quality and efficiency. And we find that the original parameterization type for image generation, which learns to predict noise, is harmful for dense prediction; the multi-step noising/denoising diffusion process is also unnecessary and challenging to optimize. Based on these insights, we introduce Lotus, a diffusion-based visual foundation model with a simple yet effective adaptation protocol for dense prediction. Specifically, Lotus is trained to directly predict annotations instead of noise, thereby avoiding harmful variance. We also reformulate the diffusion process into a single-step procedure, simplifying optimization and significantly boosting inference speed. Additionally, we introduce a novel tuning strategy called detail preserver, which achieves more accurate and fine-grained predictions. Without scaling up the training data or model capacity, Lotus achieves SoTA performance in zero-shot depth and normal estimation across various datasets. It also significantly enhances efficiency, being hundreds of times faster than most existing diffusion-based methods.
DetDiffusion: Synergizing Generative and Perceptive Models for Enhanced Data Generation and Perception
Mar 20, 2024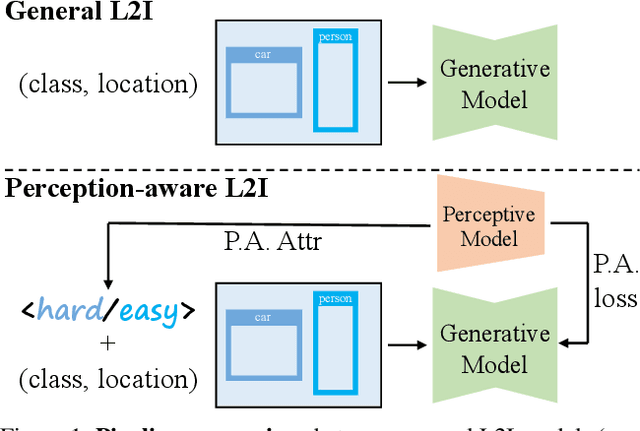
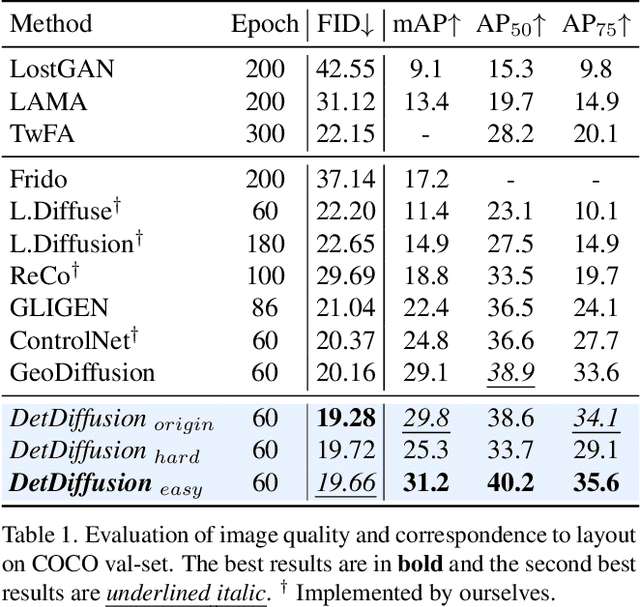
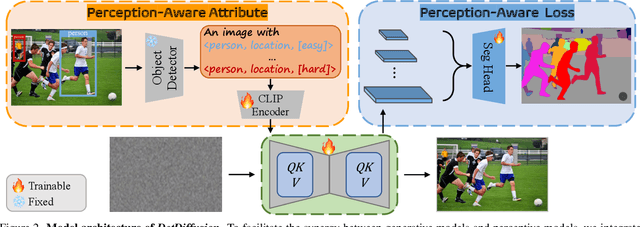
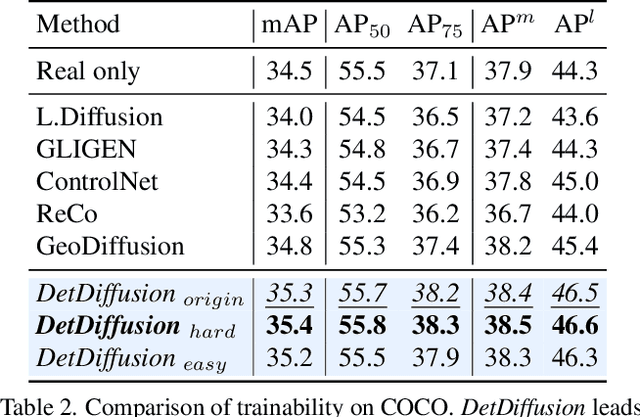
Current perceptive models heavily depend on resource-intensive datasets, prompting the need for innovative solutions. Leveraging recent advances in diffusion models, synthetic data, by constructing image inputs from various annotations, proves beneficial for downstream tasks. While prior methods have separately addressed generative and perceptive models, DetDiffusion, for the first time, harmonizes both, tackling the challenges in generating effective data for perceptive models. To enhance image generation with perceptive models, we introduce perception-aware loss (P.A. loss) through segmentation, improving both quality and controllability. To boost the performance of specific perceptive models, our method customizes data augmentation by extracting and utilizing perception-aware attribute (P.A. Attr) during generation. Experimental results from the object detection task highlight DetDiffusion's superior performance, establishing a new state-of-the-art in layout-guided generation. Furthermore, image syntheses from DetDiffusion can effectively augment training data, significantly enhancing downstream detection performance.
Forging Vision Foundation Models for Autonomous Driving: Challenges, Methodologies, and Opportunities
Jan 16, 2024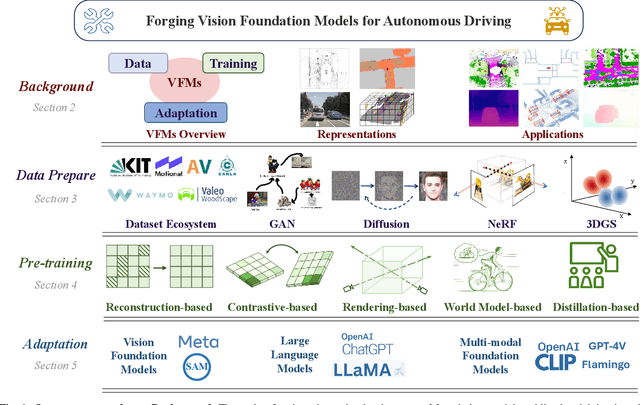
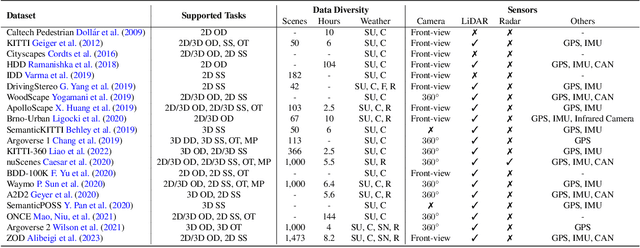
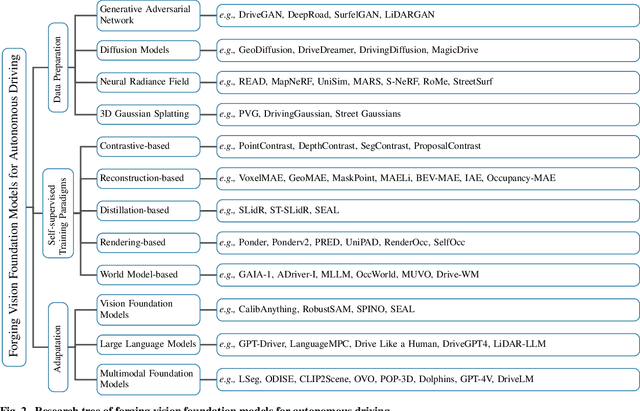
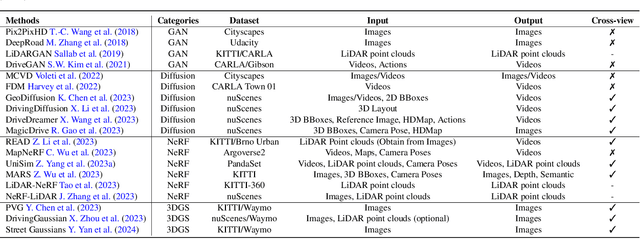
The rise of large foundation models, trained on extensive datasets, is revolutionizing the field of AI. Models such as SAM, DALL-E2, and GPT-4 showcase their adaptability by extracting intricate patterns and performing effectively across diverse tasks, thereby serving as potent building blocks for a wide range of AI applications. Autonomous driving, a vibrant front in AI applications, remains challenged by the lack of dedicated vision foundation models (VFMs). The scarcity of comprehensive training data, the need for multi-sensor integration, and the diverse task-specific architectures pose significant obstacles to the development of VFMs in this field. This paper delves into the critical challenge of forging VFMs tailored specifically for autonomous driving, while also outlining future directions. Through a systematic analysis of over 250 papers, we dissect essential techniques for VFM development, including data preparation, pre-training strategies, and downstream task adaptation. Moreover, we explore key advancements such as NeRF, diffusion models, 3D Gaussian Splatting, and world models, presenting a comprehensive roadmap for future research. To empower researchers, we have built and maintained https://github.com/zhanghm1995/Forge_VFM4AD, an open-access repository constantly updated with the latest advancements in forging VFMs for autonomous driving.