 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoNTA: Accelerating Mixture-of-Experts Training with Network-Traffc-Aware Parallel Optimization
Nov 01, 2024



The Mixture of Experts (MoE) is an advanced model architecture in the industry that combines multiple specialized expert models from various domains into a single supermodel. This approach enables the model to scale without significantly increasing the computational costs of training and inference, while maximizing model performance. However, current distributed training frameworks do not consider the ultimate optimization of communication, especially for large base models. This paper proposes a network-traffic-aware parallel optimization method that selects the optimal parallel strategy based on the communication volume, and the training cluster's inter-node and intra-node network topologies. Compared to the DeepSpeed, MoNTA achieves an 8x increase in AllToAll communication performance under 8-card tensor parallelism. Compared to the baseline, training a 2x70B model using 16 A800 cards, with an 8K sequence, results in a 13% overall latency performance improvement. Project Page: https://github.com/EnflameTechnology/DeepSpeed.
Forging Vision Foundation Models for Autonomous Driving: Challenges, Methodologies, and Opportunities
Jan 16, 2024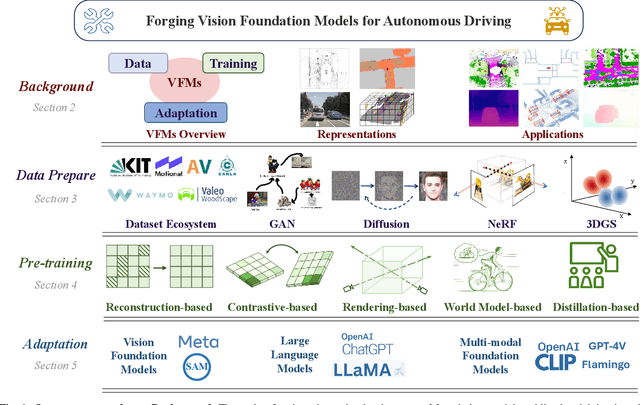
The rise of large foundation models, trained on extensive datasets, is revolutionizing the field of AI. Models such as SAM, DALL-E2, and GPT-4 showcase their adaptability by extracting intricate patterns and performing effectively across diverse tasks, thereby serving as potent building blocks for a wide range of AI applications. Autonomous driving, a vibrant front in AI applications, remains challenged by the lack of dedicated vision foundation models (VFMs). The scarcity of comprehensive training data, the need for multi-sensor integration, and the diverse task-specific architectures pose significant obstacles to the development of VFMs in this field. This paper delves into the critical challenge of forging VFMs tailored specifically for autonomous driving, while also outlining future directions. Through a systematic analysis of over 250 papers, we dissect essential techniques for VFM development, including data preparation, pre-training strategies, and downstream task adaptation. Moreover, we explore key advancements such as NeRF, diffusion models, 3D Gaussian Splatting, and world models, presenting a comprehensive roadmap for future research. To empower researchers, we have built and maintained https://github.com/zhanghm1995/Forge_VFM4AD, an open-access repository constantly updated with the latest advancements in forging VFMs for autonomous driving.
GPA-3D: Geometry-aware Prototype Alignment for Unsupervised Domain Adaptive 3D Object Detection from Point Clouds
Aug 16, 2023



LiDAR-based 3D detection has made great progress in recent years. However, the performance of 3D detectors is considerably limited when deployed in unseen environments, owing to the severe domain gap problem. Existing domain adaptive 3D detection methods do not adequately consider the problem of the distributional discrepancy in feature space, thereby hindering generalization of detectors across domains. In this work, we propose a novel unsupervised domain adaptive \textbf{3D} detection framework, namely \textbf{G}eometry-aware \textbf{P}rototype \textbf{A}lignment (\textbf{GPA-3D}), which explicitly leverages the intrinsic geometric relationship from point cloud objects to reduce the feature discrepancy, thus facilitating cross-domain transferring. Specifically, GPA-3D assigns a series of tailored and learnable prototypes to point cloud objects with distinct geometric structures. Each prototype aligns BEV (bird's-eye-view) features derived from corresponding point cloud objects on source and target domains, reducing the distributional discrepancy and achieving better adaptation. The evaluation results obtained on various benchmarks, including Waymo, nuScenes and KITTI, demonstrate the superiority of our GPA-3D over the state-of-the-art approaches for different adaptation scenarios. The MindSpore version code will be publicly available at \url{https://github.com/Liz66666/GPA3D}.
How to Build a Curb Dataset with LiDAR Data for Autonomous Driving
Oct 08, 2021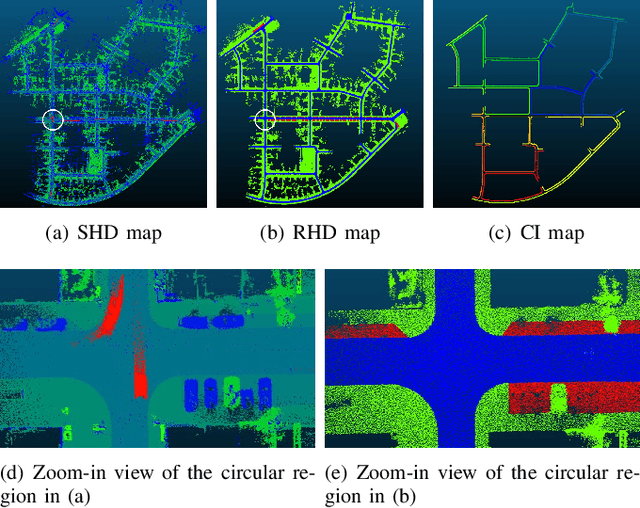
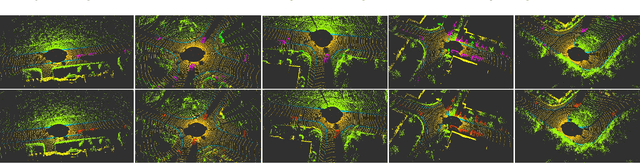
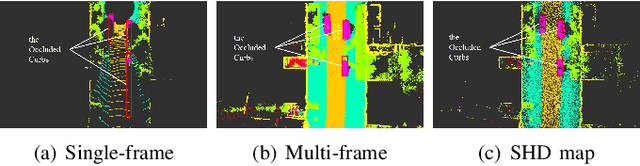
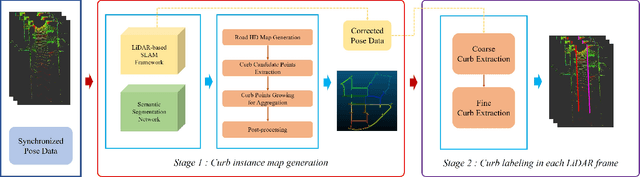
Curbs are one of the essential elements of urban and highway traffic environments. Robust curb detection provides road structure information for motion planning in an autonomous driving system. Commonly, video cameras and 3D LiDARs are mounted on autonomous vehicles for curb detection. However, camera-based methods suffer from challenging illumination conditions. During the long period of time before wide application of Deep Neural Network (DNN) with point clouds, LiDAR-based curb detection methods are based on hand-crafted features, which suffer from poor detection in some complex scenes. Recently, DNN-based dynamic object detection using LiDAR data has become prevalent, while few works pay attention to curb detection with a DNN approach due to lack of labeled data. A dataset with curb annotations or an efficient curb labeling approach, hence, is of high demand...