 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOvercoming Saturation in Density Ratio Estimation by Iterated Regularization
Feb 21, 2024



Estimating the ratio of two probability densities from finitely many samples, is a central task in machine learning and statistics. In this work, we show that a large class of kernel methods for density ratio estimation suffers from error saturation, which prevents algorithms from achieving fast error convergence rates on highly regular learning problems. To resolve saturation, we introduce iterated regularization in density ratio estimation to achieve fast error rates. Our methods outperform its non-iteratively regularized versions on benchmarks for density ratio estimation as well as on large-scale evaluations for importance-weighted ensembling of deep unsupervised domain adaptation models.
Contrastive Tuning: A Little Help to Make Masked Autoencoders Forget
Apr 20, 2023



Masked Image Modeling (MIM) methods, like Masked Autoencoders (MAE), efficiently learn a rich representation of the input. However, for adapting to downstream tasks, they require a sufficient amount of labeled data since their rich features capture not only objects but also less relevant image background. In contrast, Instance Discrimination (ID) methods focus on objects. In this work, we study how to combine the efficiency and scalability of MIM with the ability of ID to perform downstream classification in the absence of large amounts of labeled data. To this end, we introduce Masked Autoencoder Contrastive Tuning (MAE-CT), a sequential approach that applies Nearest Neighbor Contrastive Learning (NNCLR) to a pre-trained MAE. MAE-CT tunes the rich features such that they form semantic clusters of objects without using any labels. Applied to large and huge Vision Transformer (ViT) models, MAE-CT matches or excels previous self-supervised methods trained on ImageNet in linear probing, k-NN and low-shot classification accuracy as well as in unsupervised clustering accuracy. Notably, similar results can be achieved without additional image augmentations. While ID methods generally rely on hand-crafted augmentations to avoid shortcut learning, we find that nearest neighbor lookup is sufficient and that this data-driven augmentation effect improves with model size. MAE-CT is compute efficient. For instance, starting from a MAE pre-trained ViT-L/16, MAE-CT increases the ImageNet 1% low-shot accuracy from 67.7% to 72.6%, linear probing accuracy from 76.0% to 80.2% and k-NN accuracy from 60.6% to 79.1% in just five hours using eight A100 GPUs.
CLOOB: Modern Hopfield Networks with InfoLOOB Outperform CLIP
Oct 21, 2021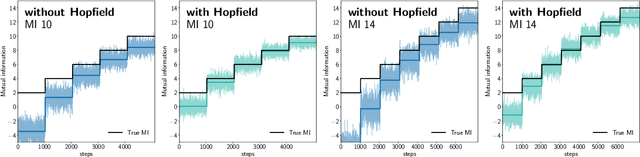
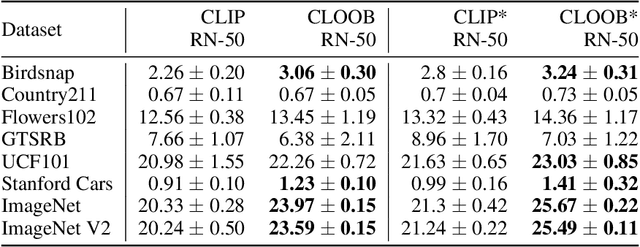
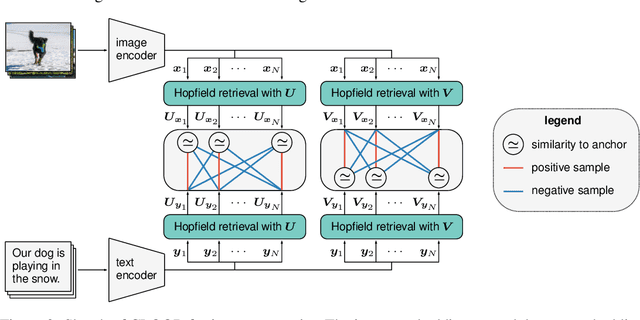
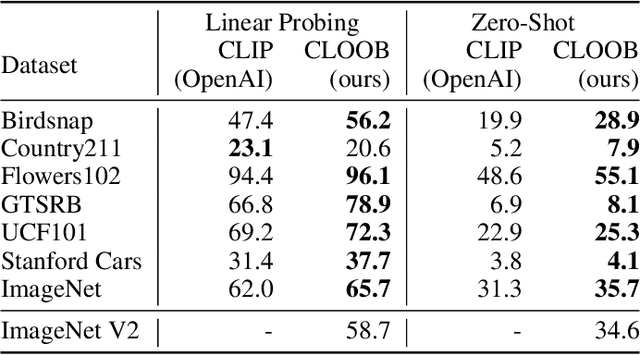
Contrastive learning with the InfoNCE objective is exceptionally successful in various self-supervised learning tasks. Recently, the CLIP model yielded impressive results on zero-shot transfer learning when using InfoNCE for learning visual representations from natural language supervision. However, InfoNCE as a lower bound on the mutual information has been shown to perform poorly for high mutual information. In contrast, the InfoLOOB upper bound (leave one out bound) works well for high mutual information but suffers from large variance and instabilities. We introduce "Contrastive Leave One Out Boost" (CLOOB), where modern Hopfield networks boost learning with the InfoLOOB objective. Modern Hopfield networks replace the original embeddings by retrieved embeddings in the InfoLOOB objective. The retrieved embeddings give InfoLOOB two assets. Firstly, the retrieved embeddings stabilize InfoLOOB, since they are less noisy and more similar to one another than the original embeddings. Secondly, they are enriched by correlations, since the covariance structure of embeddings is reinforced through retrievals. We compare CLOOB to CLIP after learning on the Conceptual Captions and the YFCC dataset with respect to their zero-shot transfer learning performance on other datasets. CLOOB consistently outperforms CLIP at zero-shot transfer learning across all considered architectures and datasets.
Hopfield Networks is All You Need
Jul 16, 2020
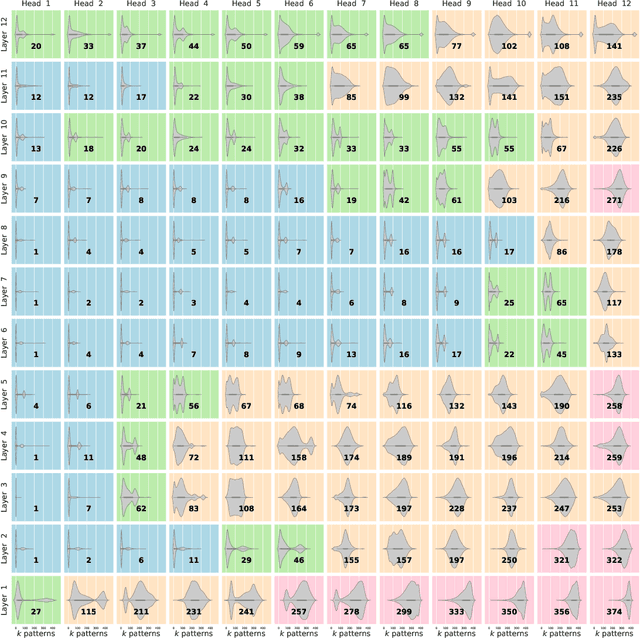
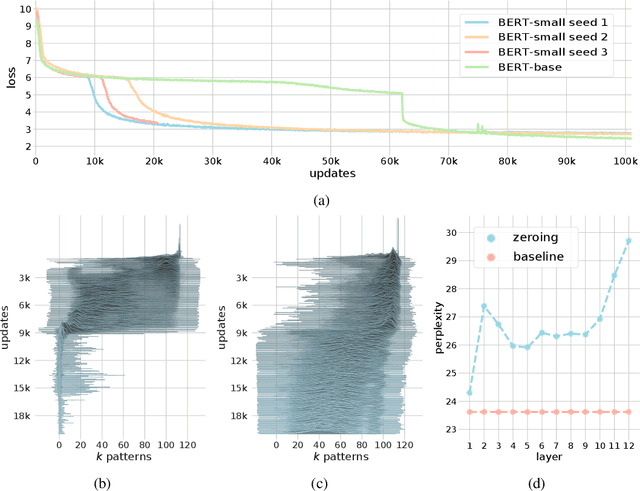
We show that the transformer attention mechanism is the update rule of a modern Hopfield network with continuous states. This new Hopfield network can store exponentially (with the dimension) many patterns, converges with one update, and has exponentially small retrieval errors. The number of stored patterns is traded off against convergence speed and retrieval error. The new Hopfield network has three types of energy minima (fixed points of the update): (1) global fixed point averaging over all patterns, (2) metastable states averaging over a subset of patterns, and (3) fixed points which store a single pattern. Transformer and BERT models operate in their first layers preferably in the global averaging regime, while they operate in higher layers in metastable states. The gradient in transformers is maximal for metastable states, is uniformly distributed for global averaging, and vanishes for a fixed point near a stored pattern. Using the Hopfield network interpretation, we analyzed learning of transformer and BERT models. Learning starts with attention heads that average and then most of them switch to metastable states. However, the majority of heads in the first layers still averages and can be replaced by averaging, e.g. our proposed Gaussian weighting. In contrast, heads in the last layers steadily learn and seem to use metastable states to collect information created in lower layers. These heads seem to be a promising target for improving transformers. Neural networks with Hopfield networks outperform other methods on immune repertoire classification, where the Hopfield net stores several hundreds of thousands of patterns. We provide a new PyTorch layer called "Hopfield", which allows to equip deep learning architectures with modern Hopfield networks as a new powerful concept comprising pooling, memory, and attention. GitHub: https://github.com/ml-jku/hopfield-layers
Patch Refinement -- Localized 3D Object Detection
Oct 09, 2019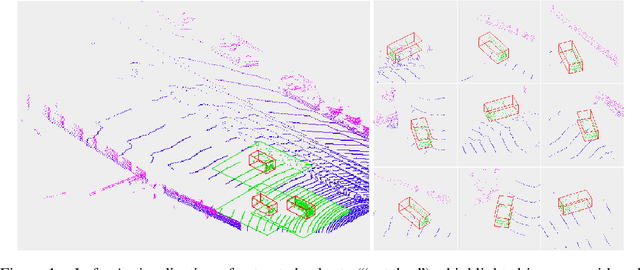
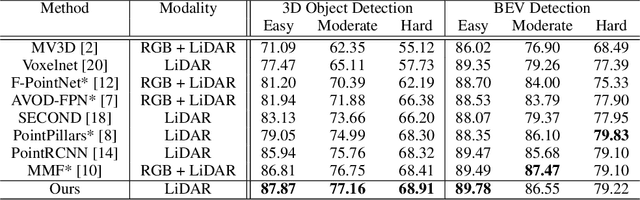
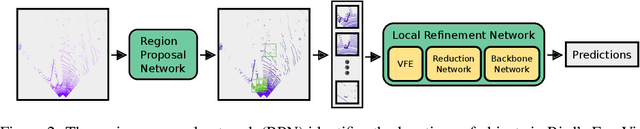
We introduce Patch Refinement a two-stage model for accurate 3D object detection and localization from point cloud data. Patch Refinement is composed of two independently trained Voxelnet-based networks, a Region Proposal Network (RPN) and a Local Refinement Network (LRN). We decompose the detection task into a preliminary Bird's Eye View (BEV) detection step and a local 3D detection step. Based on the proposed BEV locations by the RPN, we extract small point cloud subsets ("patches"), which are then processed by the LRN, which is less limited by memory constraints due to the small area of each patch. Therefore, we can apply encoding with a higher voxel resolution locally. The independence of the LRN enables the use of additional augmentation techniques and allows for an efficient, regression focused training as it uses only a small fraction of each scene. Evaluated on the KITTI 3D object detection benchmark, our submission from January 28, 2019, outperformed all previous entries on all three difficulties of the class car, using only 50 % of the available training data and only LiDAR information.