 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeedance 2.0: Advancing Video Generation for World Complexity
Apr 15, 2026Seedance 2.0 is a new native multi-modal audio-video generation model, officially released in China in early February 2026. Compared with its predecessors, Seedance 1.0 and 1.5 Pro, Seedance 2.0 adopts a unified, highly efficient, and large-scale architecture for multi-modal audio-video joint generation. This allows it to support four input modalities: text, image, audio, and video, by integrating one of the most comprehensive suites of multi-modal content reference and editing capabilities available in the industry to date. It delivers substantial, well-rounded improvements across all key sub-dimensions of video and audio generation. In both expert evaluations and public user tests, the model has demonstrated performance on par with the leading levels in the field. Seedance 2.0 supports direct generation of audio-video content with durations ranging from 4 to 15 seconds, with native output resolutions of 480p and 720p. For multi-modal inputs as reference, its current open platform supports up to 3 video clips, 9 images, and 3 audio clips. In addition, we provide Seedance 2.0 Fast version, an accelerated variant of Seedance 2.0 designed to boost generation speed for low-latency scenarios. Seedance 2.0 has delivered significant improvements to its foundational generation capabilities and multi-modal generation performance, bringing an enhanced creative experience for end users.
AdaClearGrasp: Learning Adaptive Clearing for Zero-Shot Robust Dexterous Grasping in Densely Cluttered Environments
Mar 11, 2026In densely cluttered environments, physical interference, visual occlusions, and unstable contacts often cause direct dexterous grasping to fail, while aggressive singulation strategies may compromise safety. Enabling robots to adaptively decide whether to clear surrounding objects or directly grasp the target is therefore crucial for robust manipulation. We propose AdaClearGrasp, a closed-loop decision-execution framework for adaptive clearing and zero-shot dexterous grasping in densely cluttered environments. The framework formulates manipulation as a controllable high-level decision process that determines whether to directly grasp the target or first clear surrounding objects. A pretrained vision-language model (VLM) interprets visual observations and language task descriptions to reason about grasp interference and generate a high-level planning skeleton, which invokes structured atomic skills through a unified action interface. For dexterous grasping, we train a reinforcement learning policy with a relative hand-object distance representation, enabling zero-shot generalization across diverse object geometries and physical properties. During execution, visual feedback monitors outcomes and triggers replanning upon failures, forming a closed-loop correction mechanism. To evaluate language-conditioned dexterous grasping in clutter, we introduce Clutter-Bench, the first simulation benchmark with graded clutter complexity. It includes seven target objects across three clutter levels, yielding 210 task scenarios. We further perform sim-to-real experiments on three objects under three clutter levels (18 scenarios). Results demonstrate that AdaClearGrasp significantly improves grasp success rates in densely cluttered environments. For more videos and code, please visit our project website: https://chenzixuan99.github.io/adaclear-grasp.github.io/.
Seedance 1.5 pro: A Native Audio-Visual Joint Generation Foundation Model
Dec 23, 2025Recent strides in video generation have paved the way for unified audio-visual generation. In this work, we present Seedance 1.5 pro, a foundational model engineered specifically for native, joint audio-video generation. Leveraging a dual-branch Diffusion Transformer architecture, the model integrates a cross-modal joint module with a specialized multi-stage data pipeline, achieving exceptional audio-visual synchronization and superior generation quality. To ensure practical utility, we implement meticulous post-training optimizations, including Supervised Fine-Tuning (SFT) on high-quality datasets and Reinforcement Learning from Human Feedback (RLHF) with multi-dimensional reward models. Furthermore, we introduce an acceleration framework that boosts inference speed by over 10X. Seedance 1.5 pro distinguishes itself through precise multilingual and dialect lip-syncing, dynamic cinematic camera control, and enhanced narrative coherence, positioning it as a robust engine for professional-grade content creation. Seedance 1.5 pro is now accessible on Volcano Engine at https://console.volcengine.com/ark/region:ark+cn-beijing/experience/vision?type=GenVideo.
BLAST: A Stealthy Backdoor Leverage Attack against Cooperative Multi-Agent Deep Reinforcement Learning based Systems
Jan 03, 2025



Recent studies have shown that cooperative multi-agent deep reinforcement learning (c-MADRL) is under the threat of backdoor attacks. Once a backdoor trigger is observed, it will perform malicious actions leading to failures or malicious goals. However, existing backdoor attacks suffer from several issues, e.g., instant trigger patterns lack stealthiness, the backdoor is trained or activated by an additional network, or all agents are backdoored. To this end, in this paper, we propose a novel backdoor leverage attack against c-MADRL, BLAST, which attacks the entire multi-agent team by embedding the backdoor only in a single agent. Firstly, we introduce adversary spatiotemporal behavior patterns as the backdoor trigger rather than manual-injected fixed visual patterns or instant status and control the period to perform malicious actions. This method can guarantee the stealthiness and practicality of BLAST. Secondly, we hack the original reward function of the backdoor agent via unilateral guidance to inject BLAST, so as to achieve the \textit{leverage attack effect} that can pry open the entire multi-agent system via a single backdoor agent. We evaluate our BLAST against 3 classic c-MADRL algorithms (VDN, QMIX, and MAPPO) in 2 popular c-MADRL environments (SMAC and Pursuit), and 2 existing defense mechanisms. The experimental results demonstrate that BLAST can achieve a high attack success rate while maintaining a low clean performance variance rate.
Transmission and Color-guided Network for Underwater Image Enhancement
Aug 09, 2023In recent years, with the continuous development of the marine industry, underwater image enhancement has attracted plenty of attention. Unfortunately, the propagation of light in water will be absorbed by water bodies and scattered by suspended particles, resulting in color deviation and low contrast. To solve these two problems, we propose an Adaptive Transmission and Dynamic Color guided network (named ATDCnet) for underwater image enhancement. In particular, to exploit the knowledge of physics, we design an Adaptive Transmission-directed Module (ATM) to better guide the network. To deal with the color deviation problem, we design a Dynamic Color-guided Module (DCM) to post-process the enhanced image color. Further, we design an Encoder-Decoder-based Compensation (EDC) structure with attention and a multi-stage feature fusion mechanism to perform color restoration and contrast enhancement simultaneously. Extensive experiments demonstrate the state-of-the-art performance of the ATDCnet on multiple benchmark datasets.
A Scale-Arbitrary Image Super-Resolution Network Using Frequency-domain Information
Dec 08, 2022



Image super-resolution (SR) is a technique to recover lost high-frequency information in low-resolution (LR) images. Spatial-domain information has been widely exploited to implement image SR, so a new trend is to involve frequency-domain information in SR tasks. Besides, image SR is typically application-oriented and various computer vision tasks call for image arbitrary magnification. Therefore, in this paper, we study image features in the frequency domain to design a novel scale-arbitrary image SR network. First, we statistically analyze LR-HR image pairs of several datasets under different scale factors and find that the high-frequency spectra of different images under different scale factors suffer from different degrees of degradation, but the valid low-frequency spectra tend to be retained within a certain distribution range. Then, based on this finding, we devise an adaptive scale-aware feature division mechanism using deep reinforcement learning, which can accurately and adaptively divide the frequency spectrum into the low-frequency part to be retained and the high-frequency one to be recovered. Finally, we design a scale-aware feature recovery module to capture and fuse multi-level features for reconstructing the high-frequency spectrum at arbitrary scale factors. Extensive experiments on public datasets show the superiority of our method compared with state-of-the-art methods.
Emotion Recognition From Gait Analyses: Current Research and Future Directions
Mar 13, 2020



Human gait refers to a daily motion that represents not only mobility, but it can also be used to identify the walker by either human observers or computers. Recent studies reveal that gait even conveys information about the walker's emotion. Individuals in different emotion states may show different gait patterns. The mapping between various emotions and gait patterns provides a new source for automated emotion recognition. Compared to traditional emotion detection biometrics, such as facial expression, speech and physiological parameters, gait is remotely observable, more difficult to imitate, and requires less cooperation from the subject. These advantages make gait a promising source for emotion detection. This article reviews current research on gait-based emotion detection, particularly on how gait parameters can be affected by different emotion states and how the emotion states can be recognized through distinct gait patterns. We focus on the detailed methods and techniques applied in the whole process of emotion recognition: data collection, preprocessing, and classification. At last, we discuss possible future developments of efficient and effective gait-based emotion recognition using the state of the art techniques on intelligent computation and big data.
Adversarial Objects Against LiDAR-Based Autonomous Driving Systems
Jul 11, 2019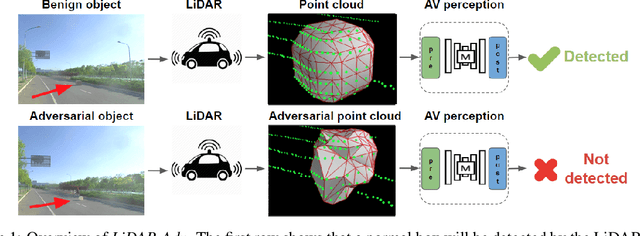
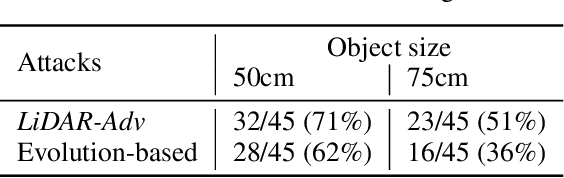

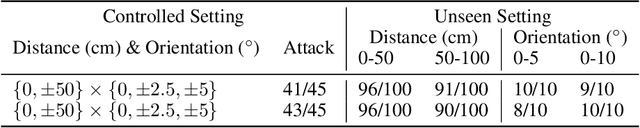
Deep neural networks (DNNs) are found to be vulnerable against adversarial examples, which are carefully crafted inputs with a small magnitude of perturbation aiming to induce arbitrarily incorrect predictions. Recent studies show that adversarial examples can pose a threat to real-world security-critical applications: a "physical adversarial Stop Sign" can be synthesized such that the autonomous driving cars will misrecognize it as others (e.g., a speed limit sign). However, these image-space adversarial examples cannot easily alter 3D scans of widely equipped LiDAR or radar on autonomous vehicles. In this paper, we reveal the potential vulnerabilities of LiDAR-based autonomous driving detection systems, by proposing an optimization based approach LiDAR-Adv to generate adversarial objects that can evade the LiDAR-based detection system under various conditions. We first show the vulnerabilities using a blackbox evolution-based algorithm, and then explore how much a strong adversary can do, using our gradient-based approach LiDAR-Adv. We test the generated adversarial objects on the Baidu Apollo autonomous driving platform and show that such physical systems are indeed vulnerable to the proposed attacks. We also 3D-print our adversarial objects and perform physical experiments to illustrate that such vulnerability exists in the real world. Please find more visualizations and results on the anonymous website: https://sites.google.com/view/lidar-adv.
Herded Gibbs Sampling
Mar 16, 2013
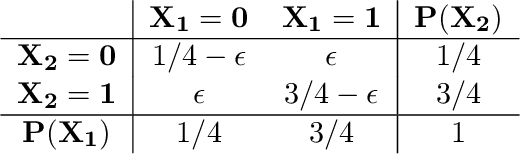
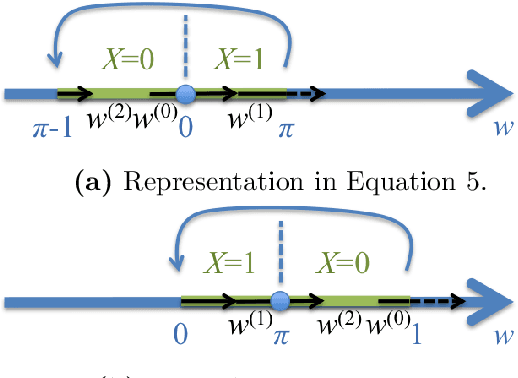
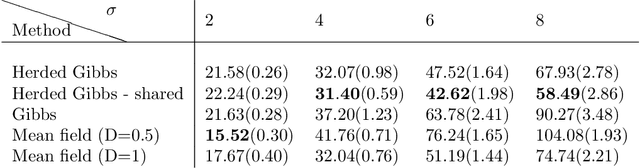
The Gibbs sampler is one of the most popular algorithms for inference in statistical models. In this paper, we introduce a herding variant of this algorithm, called herded Gibbs, that is entirely deterministic. We prove that herded Gibbs has an $O(1/T)$ convergence rate for models with independent variables and for fully connected probabilistic graphical models. Herded Gibbs is shown to outperform Gibbs in the tasks of image denoising with MRFs and named entity recognition with CRFs. However, the convergence for herded Gibbs for sparsely connected probabilistic graphical models is still an open problem.