 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDreamStereo: Towards Real-Time Stereo Inpainting for HD Videos
Apr 14, 2026Stereo video inpainting, which aims to fill the occluded regions of warped videos with visually coherent content while maintaining temporal consistency, remains a challenging open problem. The regions to be filled are scattered along object boundaries and occupy only a small fraction of each frame, leading to two key challenges. First, existing approaches perform poorly on such tasks due to the scarcity of high-quality stereo inpainting datasets, which limits their ability to learn effective inpainting priors. Second, these methods apply equal processing to all regions of the frame, even though most pixels require no modification, resulting in substantial redundant computation. To address these issues, we introduce three interconnected components. We first propose Gradient-Aware Parallax Warping (GAPW), which leverages backward warping and the gradient of the coordinate mapping function to obtain continuous edges and smooth occlusion regions. Then, a Parallax-Based Dual Projection (PBDP) strategy is introduced, which incorporates GAPW to produce geometrically consistent stereo inpainting pairs and accurate occlusion masks without requiring stereo videos. Finally, we present Sparsity-Aware Stereo Inpainting (SASI), which reduces over 70% of redundant tokens, achieving a 10.7x speedup during diffusion inference and delivering results comparable to its full-computation counterpart, enabling real-time processing of HD (768 x 1280) videos at 25 FPS on a single A100 GPU.
DUN-SRE: Deep Unrolling Network with Spatiotemporal Rotation Equivariance for Dynamic MRI Reconstruction
Jun 12, 2025Dynamic Magnetic Resonance Imaging (MRI) exhibits transformation symmetries, including spatial rotation symmetry within individual frames and temporal symmetry along the time dimension. Explicit incorporation of these symmetry priors in the reconstruction model can significantly improve image quality, especially under aggressive undersampling scenarios. Recently, Equivariant convolutional neural network (ECNN) has shown great promise in exploiting spatial symmetry priors. However, existing ECNNs critically fail to model temporal symmetry, arguably the most universal and informative structural prior in dynamic MRI reconstruction. To tackle this issue, we propose a novel Deep Unrolling Network with Spatiotemporal Rotation Equivariance (DUN-SRE) for Dynamic MRI Reconstruction. The DUN-SRE establishes spatiotemporal equivariance through a (2+1)D equivariant convolutional architecture. In particular, it integrates both the data consistency and proximal mapping module into a unified deep unrolling framework. This architecture ensures rigorous propagation of spatiotemporal rotation symmetry constraints throughout the reconstruction process, enabling more physically accurate modeling of cardiac motion dynamics in cine MRI. In addition, a high-fidelity group filter parameterization mechanism is developed to maintain representation precision while enforcing symmetry constraints. Comprehensive experiments on Cardiac CINE MRI datasets demonstrate that DUN-SRE achieves state-of-the-art performance, particularly in preserving rotation-symmetric structures, offering strong generalization capability to a broad range of dynamic MRI reconstruction tasks.
Patch-based Reconstruction for Unsupervised Dynamic MRI using Learnable Tensor Function with Implicit Neural Representation
May 28, 2025Dynamic MRI plays a vital role in clinical practice by capturing both spatial details and dynamic motion, but its high spatiotemporal resolution is often limited by long scan times. Deep learning (DL)-based methods have shown promising performance in accelerating dynamic MRI. However, most existing algorithms rely on large fully-sampled datasets for training, which are difficult to acquire. Recently, implicit neural representation (INR) has emerged as a powerful scan-specific paradigm for accelerated MRI, which models signals as a continuous function over spatiotemporal coordinates. Although this approach achieves efficient continuous modeling of dynamic images and robust reconstruction, it faces challenges in recovering fine details and increasing computational demands for high dimensional data representation. To enhance both efficiency and reconstruction quality, we propose TenF-INR, a novel patch-based unsupervised framework that employs INR to model bases of tensor decomposition, enabling efficient and accurate modeling of dynamic MR images with learnable tensor functions. By exploiting strong correlations in similar spatial image patches and in the temporal direction, TenF-INR enforces multidimensional low-rankness and implements patch-based reconstruction with the benefits of continuous modeling. We compare TenF-INR with state-of-the-art methods, including supervised DL methods and unsupervised approaches. Experimental results demonstrate that TenF-INR achieves high acceleration factors up to 21, outperforming all comparison methods in image quality, temporal fidelity, and quantitative metrics, even surpassing the supervised methods.
BrainSegDMlF: A Dynamic Fusion-enhanced SAM for Brain Lesion Segmentation
May 09, 2025The segmentation of substantial brain lesions is a significant and challenging task in the field of medical image segmentation. Substantial brain lesions in brain imaging exhibit high heterogeneity, with indistinct boundaries between lesion regions and normal brain tissue. Small lesions in single slices are difficult to identify, making the accurate and reproducible segmentation of abnormal regions, as well as their feature description, highly complex. Existing methods have the following limitations: 1) They rely solely on single-modal information for learning, neglecting the multi-modal information commonly used in diagnosis. This hampers the ability to comprehensively acquire brain lesion information from multiple perspectives and prevents the effective integration and utilization of multi-modal data inputs, thereby limiting a holistic understanding of lesions. 2) They are constrained by the amount of data available, leading to low sensitivity to small lesions and difficulty in detecting subtle pathological changes. 3) Current SAM-based models rely on external prompts, which cannot achieve automatic segmentation and, to some extent, affect diagnostic efficiency.To address these issues, we have developed a large-scale fully automated segmentation model specifically designed for brain lesion segmentation, named BrainSegDMLF. This model has the following features: 1) Dynamic Modal Interactive Fusion (DMIF) module that processes and integrates multi-modal data during the encoding process, providing the SAM encoder with more comprehensive modal information. 2) Layer-by-Layer Upsampling Decoder, enabling the model to extract rich low-level and high-level features even with limited data, thereby detecting the presence of small lesions. 3) Automatic segmentation masks, allowing the model to generate lesion masks automatically without requiring manual prompts.
16 Ways to Gallop: Energetics and Body Dynamics of High-Speed Quadrupedal Gaits
Mar 17, 2025

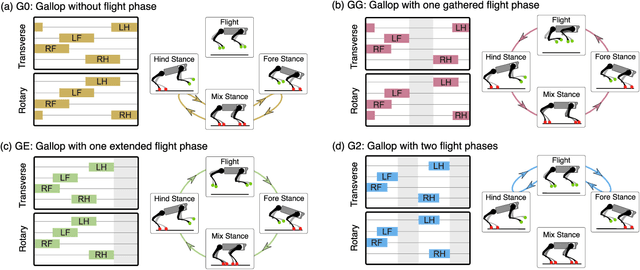
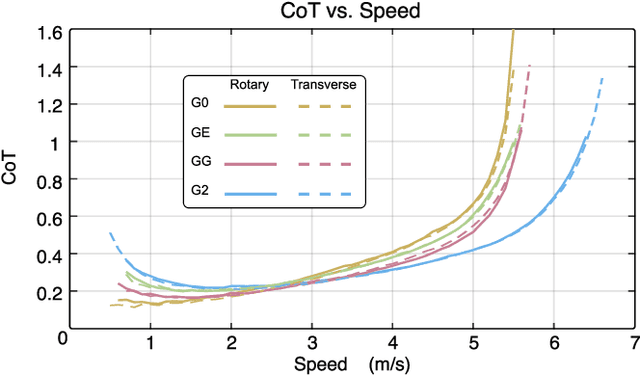
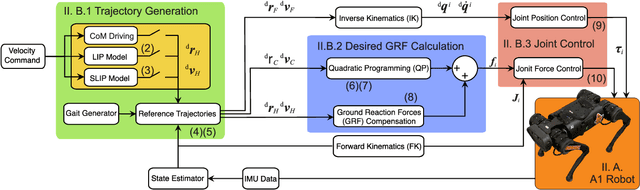
Galloping is a common high-speed gait in both animals and quadrupedal robots, yet its energetic characteristics remain insufficiently explored. This study systematically analyzes a large number of possible galloping gaits by categorizing them based on the number of flight phases per stride and the phase relationships between the front and rear legs, following Hildebrand's framework for asymmetrical gaits. Using the A1 quadrupedal robot from Unitree, we model galloping dynamics as a hybrid dynamical system and employ trajectory optimization (TO) to minimize the cost of transport (CoT) across a range of speeds. Our results reveal that rotary and transverse gallop footfall sequences exhibit no fundamental energetic difference, despite variations in body yaw and roll motion. However, the number of flight phases significantly impacts energy efficiency: galloping with no flight phases is optimal at lower speeds, whereas galloping with two flight phases minimizes energy consumption at higher speeds. We validate these findings using a quadratic programming (QP)-based controller, developed in our previous work, in Gazebo simulations. These insights advance the understanding of quadrupedal locomotion energetics and may inform future legged robot designs for adaptive, energy-efficient gait transitions.
SRE-CNN: A Spatiotemporal Rotation-Equivariant CNN for Cardiac Cine MR Imaging
Sep 13, 2024Dynamic MR images possess various transformation symmetries,including the rotation symmetry of local features within the image and along the temporal dimension. Utilizing these symmetries as prior knowledge can facilitate dynamic MR imaging with high spatiotemporal resolution. Equivariant CNN is an effective tool to leverage the symmetry priors. However, current equivariant CNN methods fail to fully exploit these symmetry priors in dynamic MR imaging. In this work, we propose a novel framework of Spatiotemporal Rotation-Equivariant CNN (SRE-CNN), spanning from the underlying high-precision filter design to the construction of the temporal-equivariant convolutional module and imaging model, to fully harness the rotation symmetries inherent in dynamic MR images. The temporal-equivariant convolutional module enables exploitation the rotation symmetries in both spatial and temporal dimensions, while the high-precision convolutional filter, based on parametrization strategy, enhances the utilization of rotation symmetry of local features to improve the reconstruction of detailed anatomical structures. Experiments conducted on highly undersampled dynamic cardiac cine data (up to 20X) have demonstrated the superior performance of our proposed approach, both quantitatively and qualitatively.
LINEAR: Learning Implicit Neural Representation With Explicit Physical Priors for Accelerated Quantitative T1rho Mapping
Jul 08, 2024



Quantitative T1rho parameter mapping has shown promise in clinical and research studies. However, it suffers from long scan times. Deep learning-based techniques have been successfully applied in accelerated quantitative MR parameter mapping. However, most methods require fully-sampled training dataset, which is impractical in the clinic. In this study, a novel subject-specific unsupervised method based on the implicit neural representation is proposed to reconstruct images from highly undersampled k-space data and estimate parameter maps from reconstructions, which only takes spatiotemporal coordinates as the input. Specifically, the proposed method learned a implicit neural representation of the MR images driven by two explicit priors of images (or k-space data), including the low-rankness of Hankel matrix, and the self-consistency of k-space data. The ablation experiments show that the proposed method can characterize the physical priors of MR images well. Moreover,experimental results of retrospective and prospective data show that the proposed method outperforms the state-of-the-art methods in terms of supressing artifacts and achieving the lowest error.
Harnessing Natural Oscillations for High-Speed, Efficient Asymmetrical Locomotion in Quadrupedal Robots
May 27, 2024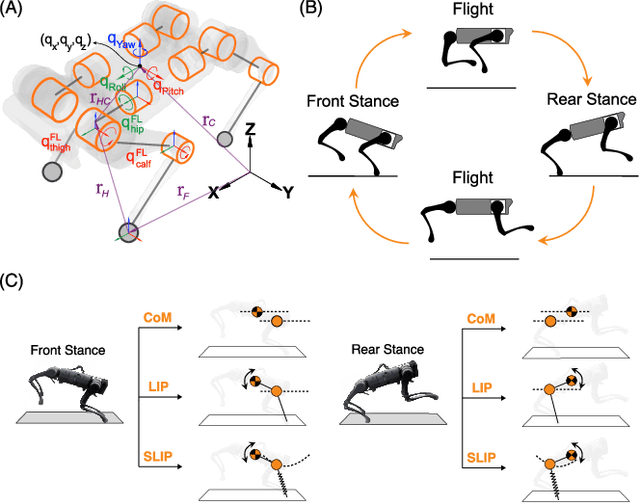
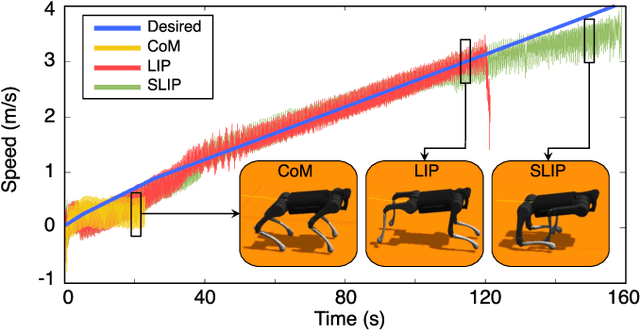
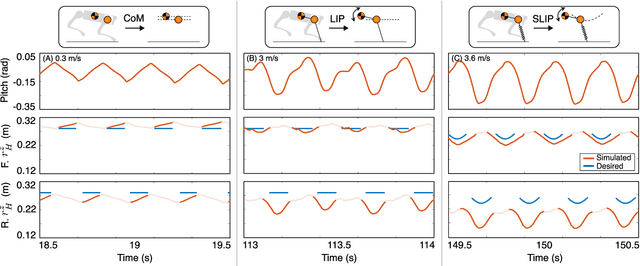
This study explores the dynamics of asymmetrical bounding gaits in quadrupedal robots, focusing on the integration of torso pitching and hip motion to enhance speed and stability. Traditional control strategies often enforce a fixed posture, minimizing natural body movements to simplify the control problem. However, this approach may overlook the inherent dynamical advantages found in natural locomotion. By considering the robot as two interconnected segments, we concentrate on stance leg motion while allowing passive torso oscillation, drawing inspiration from natural dynamics and underactuated robotics principles. Our control scheme employs Linear Inverted Pendulum (LIP) and Spring-Loaded Inverted Pendulum (SLIP) models to govern front and rear leg movements independently. This approach has been validated through extensive simulations and hardware experiments, demonstrating successful high-speed locomotion with top speeds nearing 4 m/s and reduced ground reaction forces, indicating a more efficient gait. Furthermore, unlike conventional methods, our strategy leverages natural torso oscillations to aid leg circulation and stride length, aligning robot dynamics more closely with biological counterparts. Our findings suggest that embracing the natural dynamics of quadrupedal movement, particularly in asymmetrical gaits like bounding, can lead to more stable, efficient, and high-speed robotic locomotion. This investigation lays the groundwork for future studies on versatile and dynamic quadrupedal gaits and their potential applications in scenarios demanding rapid and effective locomotion.
Learning Stable and Passive Neural Differential Equations
Apr 19, 2024



In this paper, we introduce a novel class of neural differential equation, which are intrinsically Lyapunov stable, exponentially stable or passive. We take a recently proposed Polyak Lojasiewicz network (PLNet) as an Lyapunov function and then parameterize the vector field as the descent directions of the Lyapunov function. The resulting models have a same structure as the general Hamiltonian dynamics, where the Hamiltonian is lower- and upper-bounded by quadratic functions. Moreover, it is also positive definite w.r.t. either a known or learnable equilibrium. We illustrate the effectiveness of the proposed model on a damped double pendulum system.
Proximal Gradient Descent Unfolding Dense-spatial Spectral-attention Transformer for Compressive Spectral Imaging
Dec 25, 2023The Coded Aperture Snapshot Spectral Compressive Imaging (CASSI) system modulates three-dimensional hyperspectral images into two-dimensional compressed images in a single exposure. Subsequently, three-dimensional hyperspectral images (HSI) can be reconstructed from the two-dimensional compressed measurements using reconstruction algorithms. Among these methods, deep unfolding techniques have demonstrated excellent performance, with RDLUF-MixS^2 achieving the best reconstruction results. However, RDLUF-MixS^2 requires extensive training time, taking approximately 14 days to train RDLUF-MixS^2-9stg on a single RTX 3090 GPU, making it computationally expensive. Furthermore, RDLUF-MixS^2 performs poorly on real data, resulting in significant artifacts in the reconstructed images. In this study, we introduce the Dense-spatial Spectral-attention Transformer (DST) into the Proximal Gradient Descent Unfolding Framework (PGDUF), creating a novel approach called Proximal Gradient Descent Unfolding Dense-spatial Spectral-attention Transformer (PGDUDST). Compared to RDLUF-MixS^2, PGDUDST not only surpasses the network reconstruction performance limit of RDLUF-MixS^2 but also achieves faster convergence. PGDUDST requires only 58% of the training time of RDLUF-MixS^2-9stg to achieve comparable reconstruction results. Additionally, PGDUDST significantly alleviates the artifact issues caused by RDLUF-MixS^2 in real experimental data, demonstrating superior performance and producing clearer reconstructed images.