 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge16 Ways to Gallop: Energetics and Body Dynamics of High-Speed Quadrupedal Gaits
Mar 17, 2025

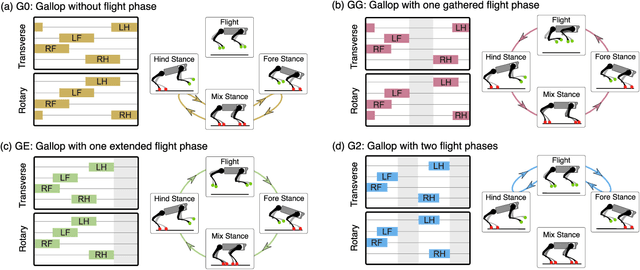
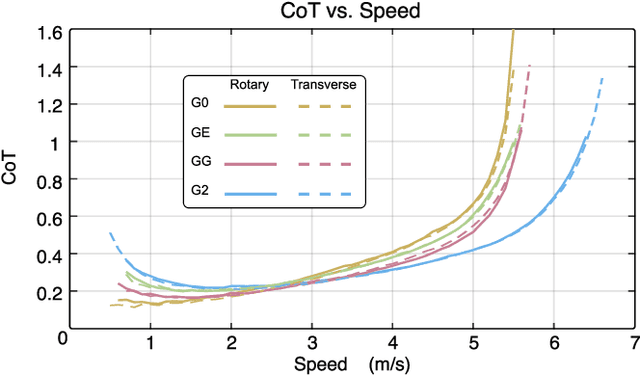
Galloping is a common high-speed gait in both animals and quadrupedal robots, yet its energetic characteristics remain insufficiently explored. This study systematically analyzes a large number of possible galloping gaits by categorizing them based on the number of flight phases per stride and the phase relationships between the front and rear legs, following Hildebrand's framework for asymmetrical gaits. Using the A1 quadrupedal robot from Unitree, we model galloping dynamics as a hybrid dynamical system and employ trajectory optimization (TO) to minimize the cost of transport (CoT) across a range of speeds. Our results reveal that rotary and transverse gallop footfall sequences exhibit no fundamental energetic difference, despite variations in body yaw and roll motion. However, the number of flight phases significantly impacts energy efficiency: galloping with no flight phases is optimal at lower speeds, whereas galloping with two flight phases minimizes energy consumption at higher speeds. We validate these findings using a quadratic programming (QP)-based controller, developed in our previous work, in Gazebo simulations. These insights advance the understanding of quadrupedal locomotion energetics and may inform future legged robot designs for adaptive, energy-efficient gait transitions.
Harnessing Natural Oscillations for High-Speed, Efficient Asymmetrical Locomotion in Quadrupedal Robots
May 27, 2024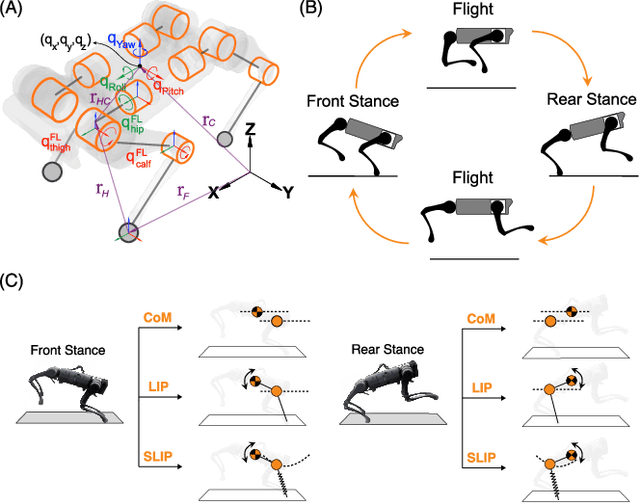
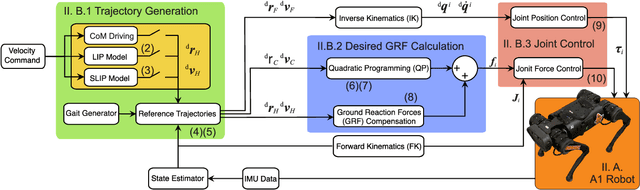
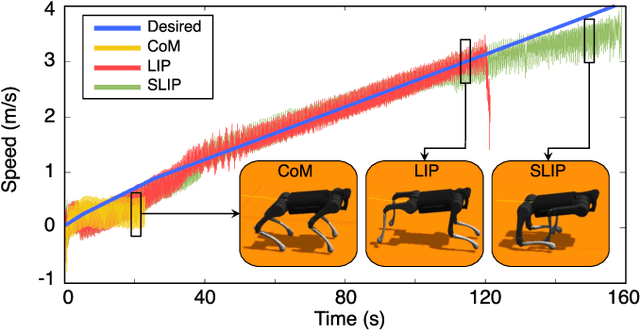
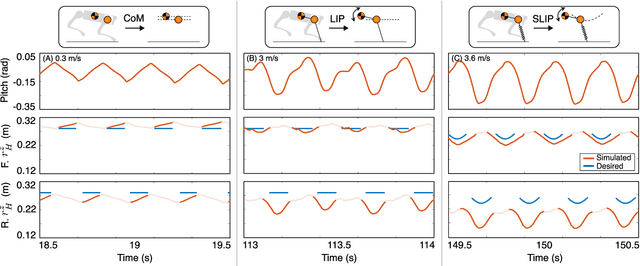
This study explores the dynamics of asymmetrical bounding gaits in quadrupedal robots, focusing on the integration of torso pitching and hip motion to enhance speed and stability. Traditional control strategies often enforce a fixed posture, minimizing natural body movements to simplify the control problem. However, this approach may overlook the inherent dynamical advantages found in natural locomotion. By considering the robot as two interconnected segments, we concentrate on stance leg motion while allowing passive torso oscillation, drawing inspiration from natural dynamics and underactuated robotics principles. Our control scheme employs Linear Inverted Pendulum (LIP) and Spring-Loaded Inverted Pendulum (SLIP) models to govern front and rear leg movements independently. This approach has been validated through extensive simulations and hardware experiments, demonstrating successful high-speed locomotion with top speeds nearing 4 m/s and reduced ground reaction forces, indicating a more efficient gait. Furthermore, unlike conventional methods, our strategy leverages natural torso oscillations to aid leg circulation and stride length, aligning robot dynamics more closely with biological counterparts. Our findings suggest that embracing the natural dynamics of quadrupedal movement, particularly in asymmetrical gaits like bounding, can lead to more stable, efficient, and high-speed robotic locomotion. This investigation lays the groundwork for future studies on versatile and dynamic quadrupedal gaits and their potential applications in scenarios demanding rapid and effective locomotion.
Energetic Analysis on the Optimal Bounding Gaits of Quadrupedal Robots
Mar 08, 2023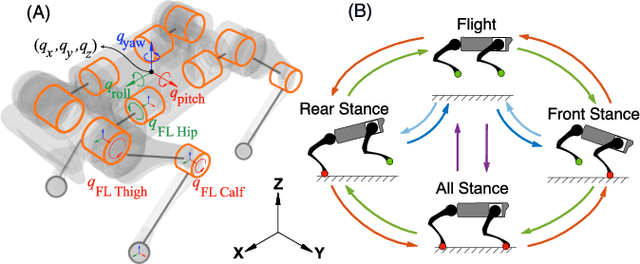
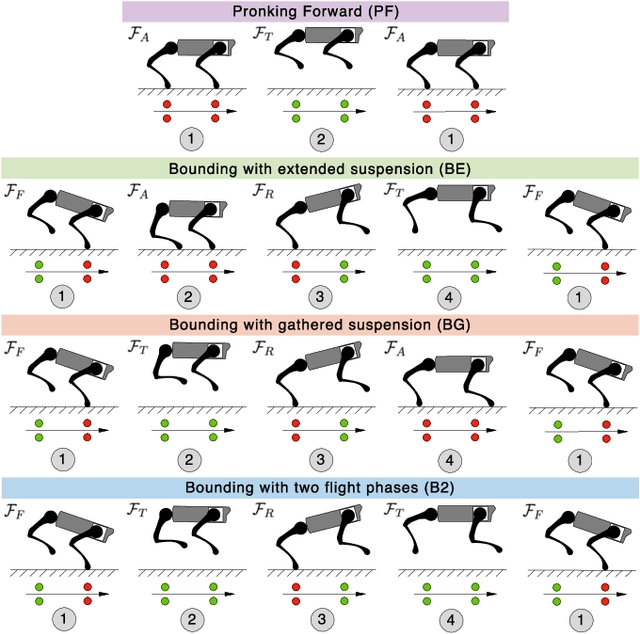
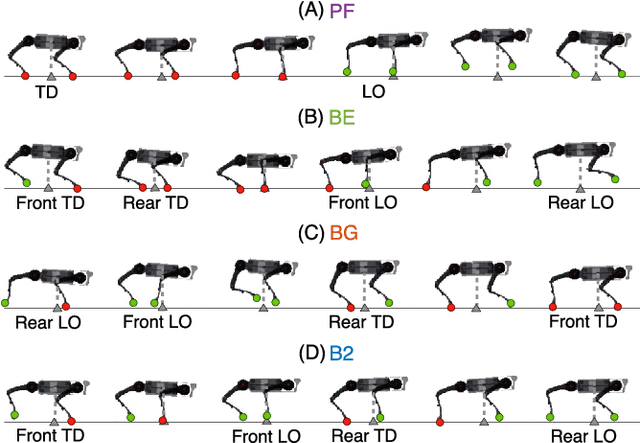
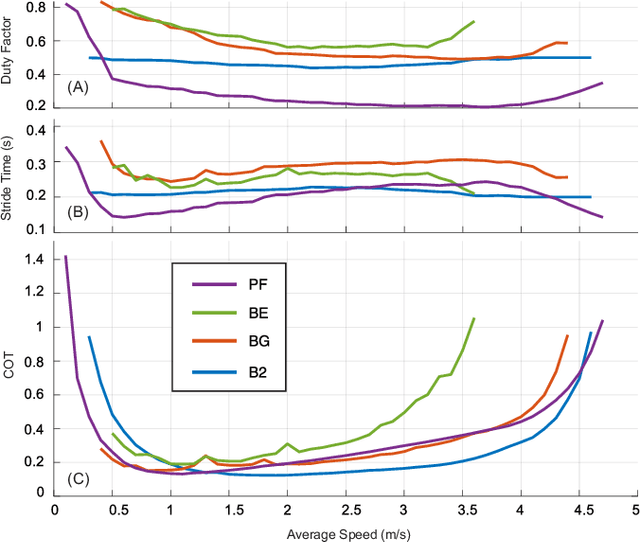
It is often overlooked by roboticists when designing locomotion controllers for their legged machines, that energy consumption plays an important role in selecting the best gaits for locomotion at high speeds or over long distances. The purpose of this study is to examine four similar asymmetrical quadrupedal gaits that are frequently observed in legged animals in nature. To understand how a specific footfall pattern will change the energetics of a legged system, we first developed a full body model of a quadrupedal robot called A1. And for each gait we created a hybrid system with desired footfall sequence and rigid impacts. In order to find the most energy efficient gait, we used optimal control methods to formulate the problem as a trajectory optimization problem with proper constraints and objective function. This problem was implemented and solved in a nonlinear programming framework called FROST. Based on the optimized trajectories for each gait, we investigated the values of cost of transport and the work done by all joints. Moreover, we analyzed the exchange of angular momentum in different components of the system during the whole stride cycle. According to the simulation results, bounding with two flight phases is likely to be the most energy efficient gait for A1 across a wide range of speed.
Practice Makes Perfect: an iterative approach to achieve precise tracking for legged robots
Nov 22, 2022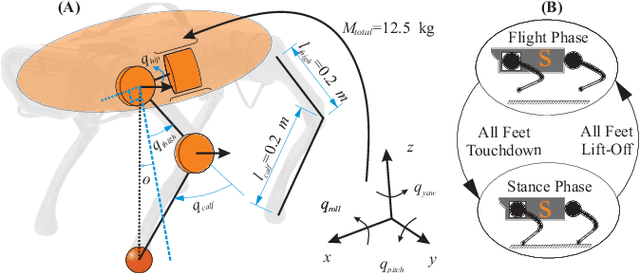



Precise trajectory tracking for legged robots can be challenging due to their high degrees of freedom, unmodeled nonlinear dynamics, or random disturbances from the environment. A commonly adopted solution to overcome these challenges is to use optimization-based algorithms and approximate the system with a simplified, reduced-order model. Additionally, deep neural networks are becoming a more promising option for achieving agile and robust legged locomotion. These approaches, however, either require large amounts of onboard calculations or the collection of millions of data points from a single robot. To address these problems and improve tracking performance, this paper proposes a method based on iterative learning control. This method lets a robot learn from its own mistakes by exploiting the repetitive nature of legged locomotion within only a few trials. Then, a torque library is created as a lookup table so that the robot does not need to repeat calculations or learn the same skill over and over again. This process resembles how animals learn their muscle memories in nature. The proposed method is tested on the A1 robot in a simulated environment, and it allows the robot to pronk at different speeds while precisely following the reference trajectories without heavy calculations.