 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQ Cache: Visual Attention is Valuable in Less than Half of Decode Layers for Multimodal Large Language Model
Feb 02, 2026Multimodal large language models (MLLMs) are plagued by exorbitant inference costs attributable to the profusion of visual tokens within the vision encoder. The redundant visual tokens engenders a substantial computational load and key-value (KV) cache footprint bottleneck. Existing approaches focus on token-wise optimization, leveraging diverse intricate token pruning techniques to eliminate non-crucial visual tokens. Nevertheless, these methods often unavoidably undermine the integrity of the KV cache, resulting in failures in long-text generation tasks. To this end, we conduct an in-depth investigation towards the attention mechanism of the model from a new perspective, and discern that attention within more than half of all decode layers are semantic similar. Upon this finding, we contend that the attention in certain layers can be streamlined by inheriting the attention from their preceding layers. Consequently, we propose Lazy Attention, an efficient attention mechanism that enables cross-layer sharing of similar attention patterns. It ingeniously reduces layer-wise redundant computation in attention. In Lazy Attention, we develop a novel layer-shared cache, Q Cache, tailored for MLLMs, which facilitates the reuse of queries across adjacent layers. In particular, Q Cache is lightweight and fully compatible with existing inference frameworks, including Flash Attention and KV cache. Additionally, our method is highly flexible as it is orthogonal to existing token-wise techniques and can be deployed independently or combined with token pruning approaches. Empirical evaluations on multiple benchmarks demonstrate that our method can reduce KV cache usage by over 35% and achieve 1.5x throughput improvement, while sacrificing only approximately 1% of performance on various MLLMs. Compared with SOTA token-wise methods, our technique achieves superior accuracy preservation.
Training-Free Multi-View Extension of IC-Light for Textual Position-Aware Scene Relighting
Nov 17, 2025We introduce GS-Light, an efficient, textual position-aware pipeline for text-guided relighting of 3D scenes represented via Gaussian Splatting (3DGS). GS-Light implements a training-free extension of a single-input diffusion model to handle multi-view inputs. Given a user prompt that may specify lighting direction, color, intensity, or reference objects, we employ a large vision-language model (LVLM) to parse the prompt into lighting priors. Using off-the-shelf estimators for geometry and semantics (depth, surface normals, and semantic segmentation), we fuse these lighting priors with view-geometry constraints to compute illumination maps and generate initial latent codes for each view. These meticulously derived init latents guide the diffusion model to generate relighting outputs that more accurately reflect user expectations, especially in terms of lighting direction. By feeding multi-view rendered images, along with the init latents, into our multi-view relighting model, we produce high-fidelity, artistically relit images. Finally, we fine-tune the 3DGS scene with the relit appearance to obtain a fully relit 3D scene. We evaluate GS-Light on both indoor and outdoor scenes, comparing it to state-of-the-art baselines including per-view relighting, video relighting, and scene editing methods. Using quantitative metrics (multi-view consistency, imaging quality, aesthetic score, semantic similarity, etc.) and qualitative assessment (user studies), GS-Light demonstrates consistent improvements over baselines. Code and assets will be made available upon publication.
PropVG: End-to-End Proposal-Driven Visual Grounding with Multi-Granularity Discrimination
Sep 05, 2025Recent advances in visual grounding have largely shifted away from traditional proposal-based two-stage frameworks due to their inefficiency and high computational complexity, favoring end-to-end direct reference paradigms. However, these methods rely exclusively on the referred target for supervision, overlooking the potential benefits of prominent prospective targets. Moreover, existing approaches often fail to incorporate multi-granularity discrimination, which is crucial for robust object identification in complex scenarios. To address these limitations, we propose PropVG, an end-to-end proposal-based framework that, to the best of our knowledge, is the first to seamlessly integrate foreground object proposal generation with referential object comprehension without requiring additional detectors. Furthermore, we introduce a Contrastive-based Refer Scoring (CRS) module, which employs contrastive learning at both sentence and word levels to enhance the capability in understanding and distinguishing referred objects. Additionally, we design a Multi-granularity Target Discrimination (MTD) module that fuses object- and semantic-level information to improve the recognition of absent targets. Extensive experiments on gRefCOCO (GREC/GRES), Ref-ZOM, R-RefCOCO, and RefCOCO (REC/RES) benchmarks demonstrate the effectiveness of PropVG. The codes and models are available at https://github.com/Dmmm1997/PropVG.
No Pixel Left Behind: A Detail-Preserving Architecture for Robust High-Resolution AI-Generated Image Detection
Aug 24, 2025The rapid growth of high-resolution, meticulously crafted AI-generated images poses a significant challenge to existing detection methods, which are often trained and evaluated on low-resolution, automatically generated datasets that do not align with the complexities of high-resolution scenarios. A common practice is to resize or center-crop high-resolution images to fit standard network inputs. However, without full coverage of all pixels, such strategies risk either obscuring subtle, high-frequency artifacts or discarding information from uncovered regions, leading to input information loss. In this paper, we introduce the High-Resolution Detail-Aggregation Network (HiDA-Net), a novel framework that ensures no pixel is left behind. We use the Feature Aggregation Module (FAM), which fuses features from multiple full-resolution local tiles with a down-sampled global view of the image. These local features are aggregated and fused with global representations for final prediction, ensuring that native-resolution details are preserved and utilized for detection. To enhance robustness against challenges such as localized AI manipulations and compression, we introduce Token-wise Forgery Localization (TFL) module for fine-grained spatial sensitivity and JPEG Quality Factor Estimation (QFE) module to disentangle generative artifacts from compression noise explicitly. Furthermore, to facilitate future research, we introduce HiRes-50K, a new challenging benchmark consisting of 50,568 images with up to 64 megapixels. Extensive experiments show that HiDA-Net achieves state-of-the-art, increasing accuracy by over 13% on the challenging Chameleon dataset and 10% on our HiRes-50K.
Multi-task Visual Grounding with Coarse-to-Fine Consistency Constraints
Jan 12, 2025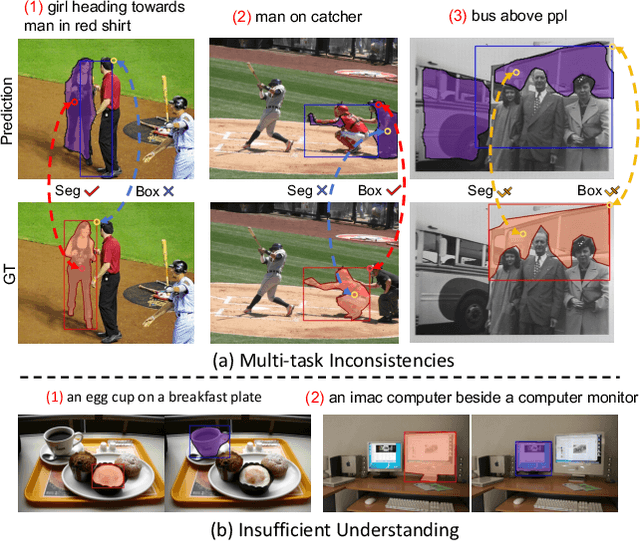
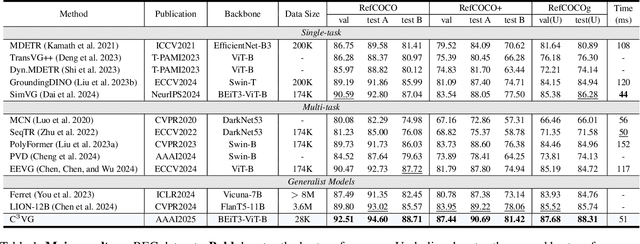

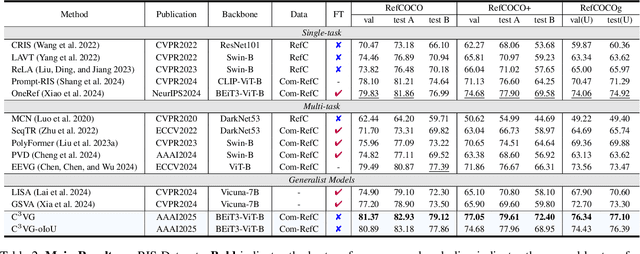
Multi-task visual grounding involves the simultaneous execution of localization and segmentation in images based on textual expressions. The majority of advanced methods predominantly focus on transformer-based multimodal fusion, aiming to extract robust multimodal representations. However, ambiguity between referring expression comprehension (REC) and referring image segmentation (RIS) is error-prone, leading to inconsistencies between multi-task predictions. Besides, insufficient multimodal understanding directly contributes to biased target perception. To overcome these challenges, we propose a Coarse-to-fine Consistency Constraints Visual Grounding architecture ($\text{C}^3\text{VG}$), which integrates implicit and explicit modeling approaches within a two-stage framework. Initially, query and pixel decoders are employed to generate preliminary detection and segmentation outputs, a process referred to as the Rough Semantic Perception (RSP) stage. These coarse predictions are subsequently refined through the proposed Mask-guided Interaction Module (MIM) and a novel explicit bidirectional consistency constraint loss to ensure consistent representations across tasks, which we term the Refined Consistency Interaction (RCI) stage. Furthermore, to address the challenge of insufficient multimodal understanding, we leverage pre-trained models based on visual-linguistic fusion representations. Empirical evaluations on the RefCOCO, RefCOCO+, and RefCOCOg datasets demonstrate the efficacy and soundness of $\text{C}^3\text{VG}$, which significantly outperforms state-of-the-art REC and RIS methods by a substantial margin. Code and model will be available at \url{https://github.com/Dmmm1997/C3VG}.
ST$^3$: Accelerating Multimodal Large Language Model by Spatial-Temporal Visual Token Trimming
Dec 28, 2024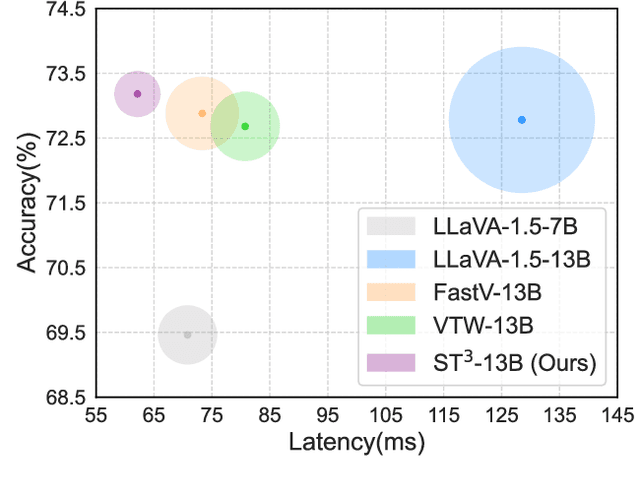



Multimodal large language models (MLLMs) enhance their perceptual capabilities by integrating visual and textual information. However, processing the massive number of visual tokens incurs a significant computational cost. Existing analysis of the MLLM attention mechanisms remains shallow, leading to coarse-grain token pruning strategies that fail to effectively balance speed and accuracy. In this paper, we conduct a comprehensive investigation of MLLM attention mechanisms with LLaVA. We find that numerous visual tokens and partial attention computations are redundant during the decoding process. Based on this insight, we propose Spatial-Temporal Visual Token Trimming ($\textbf{ST}^{3}$), a framework designed to accelerate MLLM inference without retraining. $\textbf{ST}^{3}$ consists of two primary components: 1) Progressive Visual Token Pruning (\textbf{PVTP}), which eliminates inattentive visual tokens across layers, and 2) Visual Token Annealing (\textbf{VTA}), which dynamically reduces the number of visual tokens in each layer as the generated tokens grow. Together, these techniques deliver around $\mathbf{2\times}$ faster inference with only about $\mathbf{30\%}$ KV cache memory compared to the original LLaVA, while maintaining consistent performance across various datasets. Crucially, $\textbf{ST}^{3}$ can be seamlessly integrated into existing pre-trained MLLMs, providing a plug-and-play solution for efficient inference.
Enhancing Facial Consistency in Conditional Video Generation via Facial Landmark Transformation
Dec 12, 2024

Landmark-guided character animation generation is an important field. Generating character animations with facial features consistent with a reference image remains a significant challenge in conditional video generation, especially involving complex motions like dancing. Existing methods often fail to maintain facial feature consistency due to mismatches between the facial landmarks extracted from source videos and the target facial features in the reference image. To address this problem, we propose a facial landmark transformation method based on the 3D Morphable Model (3DMM). We obtain transformed landmarks that align with the target facial features by reconstructing 3D faces from the source landmarks and adjusting the 3DMM parameters to match the reference image. Our method improves the facial consistency between the generated videos and the reference images, effectively improving the facial feature mismatch problem.
FashionR2R: Texture-preserving Rendered-to-Real Image Translation with Diffusion Models
Oct 18, 2024



Modeling and producing lifelike clothed human images has attracted researchers' attention from different areas for decades, with the complexity from highly articulated and structured content. Rendering algorithms decompose and simulate the imaging process of a camera, while are limited by the accuracy of modeled variables and the efficiency of computation. Generative models can produce impressively vivid human images, however still lacking in controllability and editability. This paper studies photorealism enhancement of rendered images, leveraging generative power from diffusion models on the controlled basis of rendering. We introduce a novel framework to translate rendered images into their realistic counterparts, which consists of two stages: Domain Knowledge Injection (DKI) and Realistic Image Generation (RIG). In DKI, we adopt positive (real) domain finetuning and negative (rendered) domain embedding to inject knowledge into a pretrained Text-to-image (T2I) diffusion model. In RIG, we generate the realistic image corresponding to the input rendered image, with a Texture-preserving Attention Control (TAC) to preserve fine-grained clothing textures, exploiting the decoupled features encoded in the UNet structure. Additionally, we introduce SynFashion dataset, featuring high-quality digital clothing images with diverse textures. Extensive experimental results demonstrate the superiority and effectiveness of our method in rendered-to-real image translation.
FALIP: Visual Prompt as Foveal Attention Boosts CLIP Zero-Shot Performance
Jul 08, 2024



CLIP has achieved impressive zero-shot performance after pre-training on a large-scale dataset consisting of paired image-text data. Previous works have utilized CLIP by incorporating manually designed visual prompts like colored circles and blur masks into the images to guide the model's attention, showing enhanced zero-shot performance in downstream tasks. Although these methods have achieved promising results, they inevitably alter the original information of the images, which can lead to failure in specific tasks. We propose a train-free method Foveal-Attention CLIP (FALIP), which adjusts the CLIP's attention by inserting foveal attention masks into the multi-head self-attention module. We demonstrate FALIP effectively boosts CLIP zero-shot performance in tasks such as referring expressions comprehension, image classification, and 3D point cloud recognition. Experimental results further show that FALIP outperforms existing methods on most metrics and can augment current methods to enhance their performance.
TeG-DG: Textually Guided Domain Generalization for Face Anti-Spoofing
Nov 30, 2023Enhancing the domain generalization performance of Face Anti-Spoofing (FAS) techniques has emerged as a research focus. Existing methods are dedicated to extracting domain-invariant features from various training domains. Despite the promising performance, the extracted features inevitably contain residual style feature bias (e.g., illumination, capture device), resulting in inferior generalization performance. In this paper, we propose an alternative and effective solution, the Textually Guided Domain Generalization (TeG-DG) framework, which can effectively leverage text information for cross-domain alignment. Our core insight is that text, as a more abstract and universal form of expression, can capture the commonalities and essential characteristics across various attacks, bridging the gap between different image domains. Contrary to existing vision-language models, the proposed framework is elaborately designed to enhance the domain generalization ability of the FAS task. Concretely, we first design a Hierarchical Attention Fusion (HAF) module to enable adaptive aggregation of visual features at different levels; Then, a Textual-Enhanced Visual Discriminator (TEVD) is proposed for not only better alignment between the two modalities but also to regularize the classifier with unbiased text features. TeG-DG significantly outperforms previous approaches, especially in situations with extremely limited source domain data (~14% and ~12% improvements on HTER and AUC respectively), showcasing impressive few-shot performance.