 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Guided Adaptive Warping for Robust and Efficient Stereo Matching
Jul 26, 2023Correlation based stereo matching has achieved outstanding performance, which pursues cost volume between two feature maps. Unfortunately, current methods with a fixed model do not work uniformly well across various datasets, greatly limiting their real-world applicability. To tackle this issue, this paper proposes a new perspective to dynamically calculate correlation for robust stereo matching. A novel Uncertainty Guided Adaptive Correlation (UGAC) module is introduced to robustly adapt the same model for different scenarios. Specifically, a variance-based uncertainty estimation is employed to adaptively adjust the sampling area during warping operation. Additionally, we improve the traditional non-parametric warping with learnable parameters, such that the position-specific weights can be learned. We show that by empowering the recurrent network with the UGAC module, stereo matching can be exploited more robustly and effectively. Extensive experiments demonstrate that our method achieves state-of-the-art performance over the ETH3D, KITTI, and Middlebury datasets when employing the same fixed model over these datasets without any retraining procedure. To target real-time applications, we further design a lightweight model based on UGAC, which also outperforms other methods over KITTI benchmarks with only 0.6 M parameters.
RealFlow: EM-based Realistic Optical Flow Dataset Generation from Videos
Jul 22, 2022
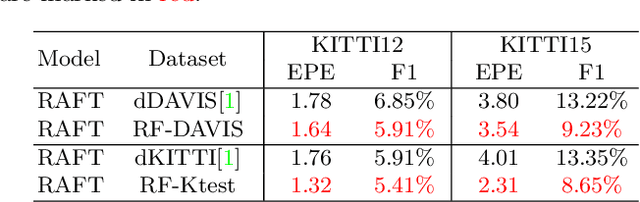
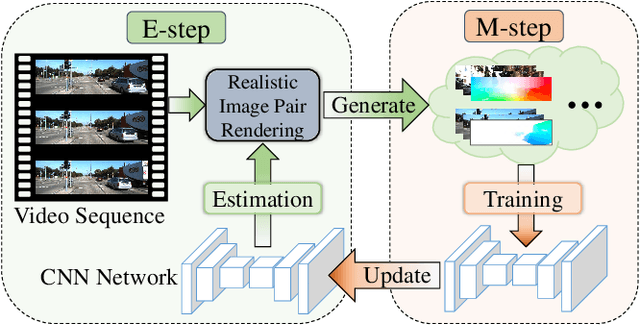
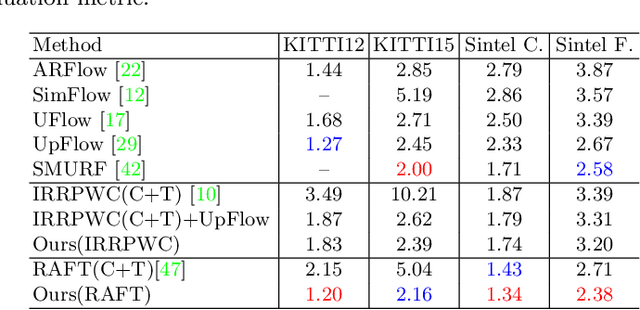
Obtaining the ground truth labels from a video is challenging since the manual annotation of pixel-wise flow labels is prohibitively expensive and laborious. Besides, existing approaches try to adapt the trained model on synthetic datasets to authentic videos, which inevitably suffers from domain discrepancy and hinders the performance for real-world applications. To solve these problems, we propose RealFlow, an Expectation-Maximization based framework that can create large-scale optical flow datasets directly from any unlabeled realistic videos. Specifically, we first estimate optical flow between a pair of video frames, and then synthesize a new image from this pair based on the predicted flow. Thus the new image pairs and their corresponding flows can be regarded as a new training set. Besides, we design a Realistic Image Pair Rendering (RIPR) module that adopts softmax splatting and bi-directional hole filling techniques to alleviate the artifacts of the image synthesis. In the E-step, RIPR renders new images to create a large quantity of training data. In the M-step, we utilize the generated training data to train an optical flow network, which can be used to estimate optical flows in the next E-step. During the iterative learning steps, the capability of the flow network is gradually improved, so is the accuracy of the flow, as well as the quality of the synthesized dataset. Experimental results show that RealFlow outperforms previous dataset generation methods by a considerably large margin. Moreover, based on the generated dataset, our approach achieves state-of-the-art performance on two standard benchmarks compared with both supervised and unsupervised optical flow methods. Our code and dataset are available at https://github.com/megvii-research/RealFlow
DIP: Deep Inverse Patchmatch for High-Resolution Optical Flow
Apr 01, 2022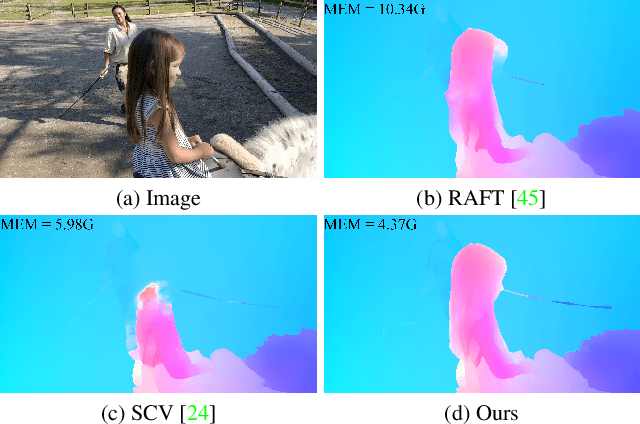
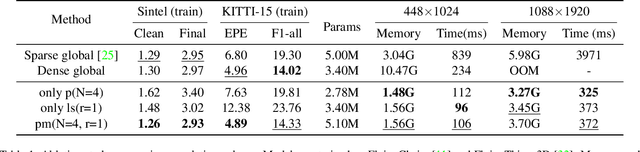
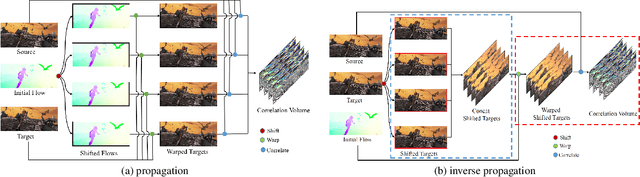
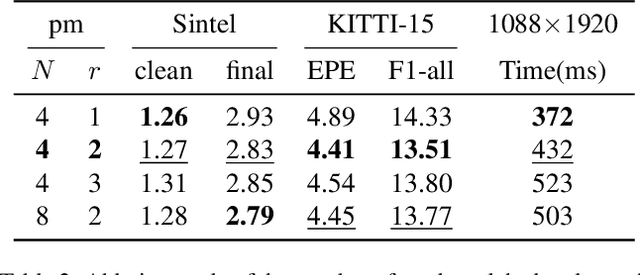
Recently, the dense correlation volume method achieves state-of-the-art performance in optical flow. However, the correlation volume computation requires a lot of memory, which makes prediction difficult on high-resolution images. In this paper, we propose a novel Patchmatch-based framework to work on high-resolution optical flow estimation. Specifically, we introduce the first end-to-end Patchmatch based deep learning optical flow. It can get high-precision results with lower memory benefiting from propagation and local search of Patchmatch. Furthermore, a new inverse propagation is proposed to decouple the complex operations of propagation, which can significantly reduce calculations in multiple iterations. At the time of submission, our method ranks first on all the metrics on the popular KITTI2015 benchmark, and ranks second on EPE on the Sintel clean benchmark among published optical flow methods. Experiment shows our method has a strong cross-dataset generalization ability that the F1-all achieves 13.73%, reducing 21% from the best published result 17.4% on KITTI2015. What's more, our method shows a good details preserving result on the high-resolution dataset DAVIS and consumes 2x less memory than RAFT.
Practical Stereo Matching via Cascaded Recurrent Network with Adaptive Correlation
Mar 22, 2022
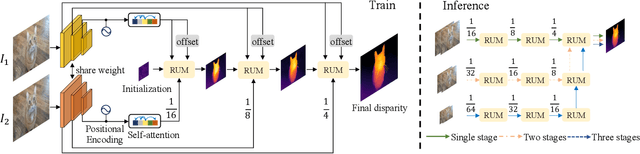
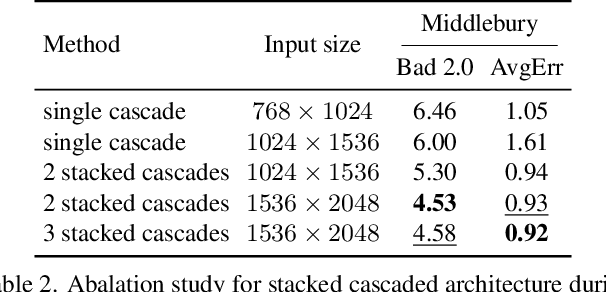
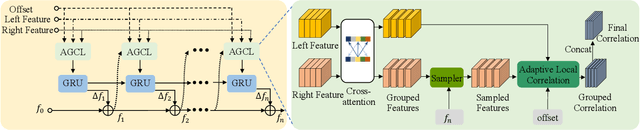
With the advent of convolutional neural networks, stereo matching algorithms have recently gained tremendous progress. However, it remains a great challenge to accurately extract disparities from real-world image pairs taken by consumer-level devices like smartphones, due to practical complicating factors such as thin structures, non-ideal rectification, camera module inconsistencies and various hard-case scenes. In this paper, we propose a set of innovative designs to tackle the problem of practical stereo matching: 1) to better recover fine depth details, we design a hierarchical network with recurrent refinement to update disparities in a coarse-to-fine manner, as well as a stacked cascaded architecture for inference; 2) we propose an adaptive group correlation layer to mitigate the impact of erroneous rectification; 3) we introduce a new synthetic dataset with special attention to difficult cases for better generalizing to real-world scenes. Our results not only rank 1st on both Middlebury and ETH3D benchmarks, outperforming existing state-of-the-art methods by a notable margin, but also exhibit high-quality details for real-life photos, which clearly demonstrates the efficacy of our contributions.
Practical Wide-Angle Portraits Correction with Deep Structured Models
Apr 28, 2021

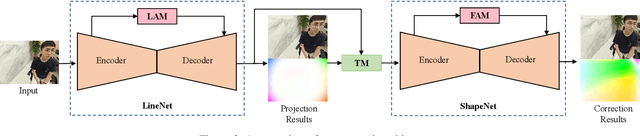

Wide-angle portraits often enjoy expanded views. However, they contain perspective distortions, especially noticeable when capturing group portrait photos, where the background is skewed and faces are stretched. This paper introduces the first deep learning based approach to remove such artifacts from freely-shot photos. Specifically, given a wide-angle portrait as input, we build a cascaded network consisting of a LineNet, a ShapeNet, and a transition module (TM), which corrects perspective distortions on the background, adapts to the stereographic projection on facial regions, and achieves smooth transitions between these two projections, accordingly. To train our network, we build the first perspective portrait dataset with a large diversity in identities, scenes and camera modules. For the quantitative evaluation, we introduce two novel metrics, line consistency and face congruence. Compared to the previous state-of-the-art approach, our method does not require camera distortion parameters. We demonstrate that our approach significantly outperforms the previous state-of-the-art approach both qualitatively and quantitatively.
Disentangled Image Matting
Sep 10, 2019

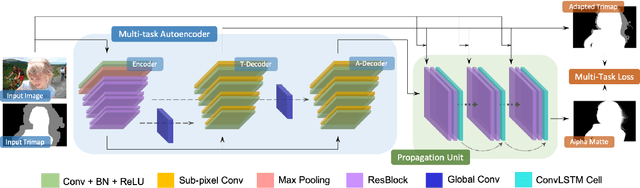

Most previous image matting methods require a roughly-specificed trimap as input, and estimate fractional alpha values for all pixels that are in the unknown region of the trimap. In this paper, we argue that directly estimating the alpha matte from a coarse trimap is a major limitation of previous methods, as this practice tries to address two difficult and inherently different problems at the same time: identifying true blending pixels inside the trimap region, and estimate accurate alpha values for them. We propose AdaMatting, a new end-to-end matting framework that disentangles this problem into two sub-tasks: trimap adaptation and alpha estimation. Trimap adaptation is a pixel-wise classification problem that infers the global structure of the input image by identifying definite foreground, background, and semi-transparent image regions. Alpha estimation is a regression problem that calculates the opacity value of each blended pixel. Our method separately handles these two sub-tasks within a single deep convolutional neural network (CNN). Extensive experiments show that AdaMatting has additional structure awareness and trimap fault-tolerance. Our method achieves the state-of-the-art performance on Adobe Composition-1k dataset both qualitatively and quantitatively. It is also the current best-performing method on the alphamatting.com online evaluation for all commonly-used metrics.