 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuity Preserving Online CenterLine Graph Learning
Jul 16, 2024



Lane topology, which is usually modeled by a centerline graph, is essential for high-level autonomous driving. For a high-quality graph, both topology connectivity and spatial continuity of centerline segments are critical. However, most of existing approaches pay more attention to connectivity while neglect the continuity. Such kind of centerline graph usually cause problem to planning of autonomous driving. To overcome this problem, we present an end-to-end network, CGNet, with three key modules: 1)Junction Aware Query Enhancement module, which provides positional prior to accurately predict junction points; 2)B\'ezier Space Connection module, which enforces continuity constraints on any two topologically connected segments in a B\'ezier space; 3) Iterative Topology Refinement module, which is a graph-based network with memory to iteratively refine the predicted topological connectivity. CGNet achieves state-of-the-art performance on both nuScenes and Argoverse2 datasets.
RealFlow: EM-based Realistic Optical Flow Dataset Generation from Videos
Jul 22, 2022
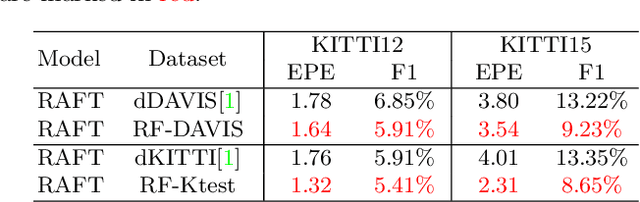
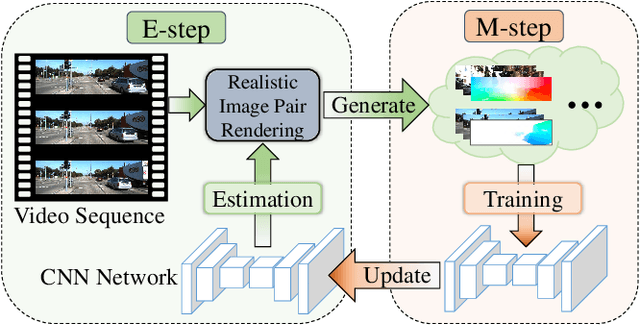
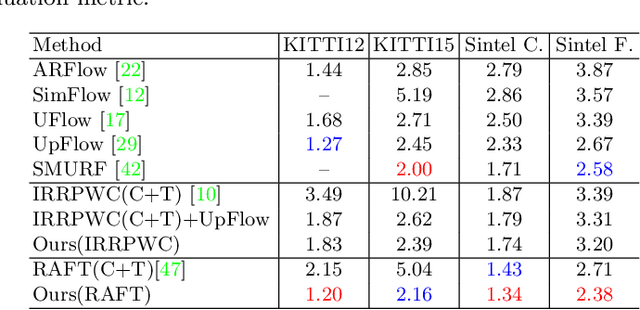
Obtaining the ground truth labels from a video is challenging since the manual annotation of pixel-wise flow labels is prohibitively expensive and laborious. Besides, existing approaches try to adapt the trained model on synthetic datasets to authentic videos, which inevitably suffers from domain discrepancy and hinders the performance for real-world applications. To solve these problems, we propose RealFlow, an Expectation-Maximization based framework that can create large-scale optical flow datasets directly from any unlabeled realistic videos. Specifically, we first estimate optical flow between a pair of video frames, and then synthesize a new image from this pair based on the predicted flow. Thus the new image pairs and their corresponding flows can be regarded as a new training set. Besides, we design a Realistic Image Pair Rendering (RIPR) module that adopts softmax splatting and bi-directional hole filling techniques to alleviate the artifacts of the image synthesis. In the E-step, RIPR renders new images to create a large quantity of training data. In the M-step, we utilize the generated training data to train an optical flow network, which can be used to estimate optical flows in the next E-step. During the iterative learning steps, the capability of the flow network is gradually improved, so is the accuracy of the flow, as well as the quality of the synthesized dataset. Experimental results show that RealFlow outperforms previous dataset generation methods by a considerably large margin. Moreover, based on the generated dataset, our approach achieves state-of-the-art performance on two standard benchmarks compared with both supervised and unsupervised optical flow methods. Our code and dataset are available at https://github.com/megvii-research/RealFlow