 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEquilibrium Dynamics and Mitigation of Gender Bias in Synthetically Generated Data
Nov 12, 2025Recursive prompting with large language models enables scalable synthetic dataset generation but introduces the risk of bias amplification. We investigate gender bias dynamics across three generations of recursive text generation using three complementary evaluation frameworks: rule-based pattern matching, embedding-based semantic similarity, and downstream task performance. Experiments with three initial bias levels (0.1, 0.3, 0.6) and four mitigation strategies reveal equilibrium dynamics rather than monotonic amplification. The low initial bias amplifies toward the model's inherent bias level (+36%), whereas the high initial bias decays toward it (-26%). Among mitigation methods, contrastive augmentation, which introduces gender-swapped variants, achieves significant downstream bias reduction (98.8% for low initial bias and 91% on average) despite producing higher embedding-based bias scores. This paradox demonstrates that semantic similarity metrics may diverge from behavioral fairness outcomes, highlighting the need for multidimensional evaluation in responsible synthetic data generation.
Locate 3D: Real-World Object Localization via Self-Supervised Learning in 3D
Apr 19, 2025We present LOCATE 3D, a model for localizing objects in 3D scenes from referring expressions like "the small coffee table between the sofa and the lamp." LOCATE 3D sets a new state-of-the-art on standard referential grounding benchmarks and showcases robust generalization capabilities. Notably, LOCATE 3D operates directly on sensor observation streams (posed RGB-D frames), enabling real-world deployment on robots and AR devices. Key to our approach is 3D-JEPA, a novel self-supervised learning (SSL) algorithm applicable to sensor point clouds. It takes as input a 3D pointcloud featurized using 2D foundation models (CLIP, DINO). Subsequently, masked prediction in latent space is employed as a pretext task to aid the self-supervised learning of contextualized pointcloud features. Once trained, the 3D-JEPA encoder is finetuned alongside a language-conditioned decoder to jointly predict 3D masks and bounding boxes. Additionally, we introduce LOCATE 3D DATASET, a new dataset for 3D referential grounding, spanning multiple capture setups with over 130K annotations. This enables a systematic study of generalization capabilities as well as a stronger model.
DexterityGen: Foundation Controller for Unprecedented Dexterity
Feb 06, 2025



Teaching robots dexterous manipulation skills, such as tool use, presents a significant challenge. Current approaches can be broadly categorized into two strategies: human teleoperation (for imitation learning) and sim-to-real reinforcement learning. The first approach is difficult as it is hard for humans to produce safe and dexterous motions on a different embodiment without touch feedback. The second RL-based approach struggles with the domain gap and involves highly task-specific reward engineering on complex tasks. Our key insight is that RL is effective at learning low-level motion primitives, while humans excel at providing coarse motion commands for complex, long-horizon tasks. Therefore, the optimal solution might be a combination of both approaches. In this paper, we introduce DexterityGen (DexGen), which uses RL to pretrain large-scale dexterous motion primitives, such as in-hand rotation or translation. We then leverage this learned dataset to train a dexterous foundational controller. In the real world, we use human teleoperation as a prompt to the controller to produce highly dexterous behavior. We evaluate the effectiveness of DexGen in both simulation and real world, demonstrating that it is a general-purpose controller that can realize input dexterous manipulation commands and significantly improves stability by 10-100x measured as duration of holding objects across diverse tasks. Notably, with DexGen we demonstrate unprecedented dexterous skills including diverse object reorientation and dexterous tool use such as pen, syringe, and screwdriver for the first time.
PARTNR: A Benchmark for Planning and Reasoning in Embodied Multi-agent Tasks
Oct 31, 2024
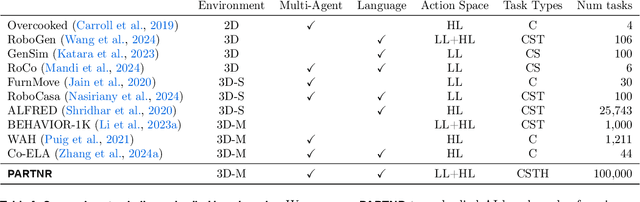

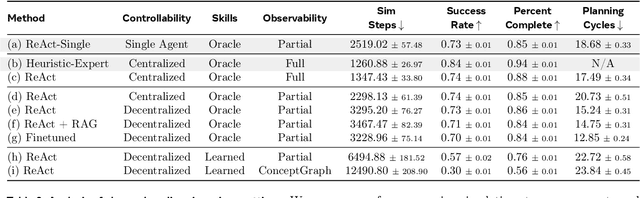
We present a benchmark for Planning And Reasoning Tasks in humaN-Robot collaboration (PARTNR) designed to study human-robot coordination in household activities. PARTNR tasks exhibit characteristics of everyday tasks, such as spatial, temporal, and heterogeneous agent capability constraints. We employ a semi-automated task generation pipeline using Large Language Models (LLMs), incorporating simulation in the loop for grounding and verification. PARTNR stands as the largest benchmark of its kind, comprising 100,000 natural language tasks, spanning 60 houses and 5,819 unique objects. We analyze state-of-the-art LLMs on PARTNR tasks, across the axes of planning, perception and skill execution. The analysis reveals significant limitations in SoTA models, such as poor coordination and failures in task tracking and recovery from errors. When LLMs are paired with real humans, they require 1.5x as many steps as two humans collaborating and 1.1x more steps than a single human, underscoring the potential for improvement in these models. We further show that fine-tuning smaller LLMs with planning data can achieve performance on par with models 9 times larger, while being 8.6x faster at inference. Overall, PARTNR highlights significant challenges facing collaborative embodied agents and aims to drive research in this direction.
EgoBlur: Responsible Innovation in Aria
Sep 06, 2023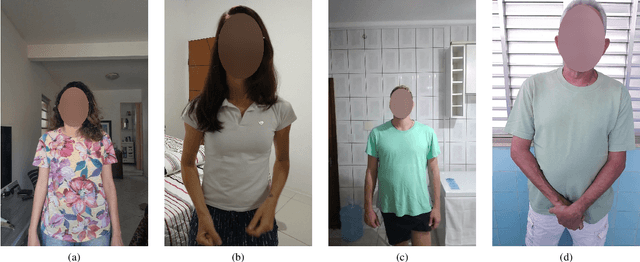
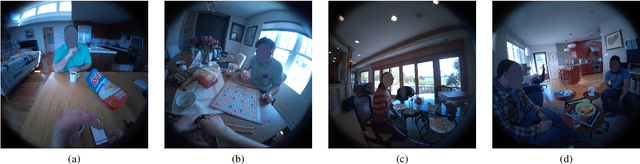
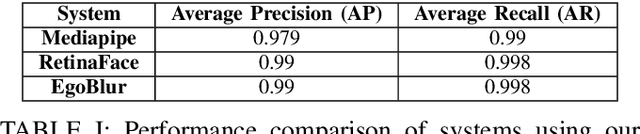
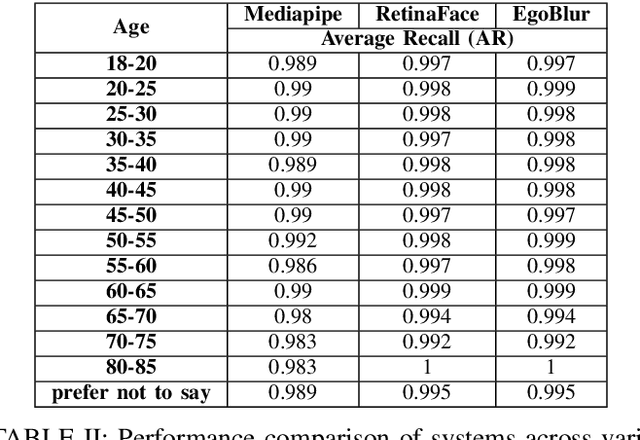
Project Aria pushes the frontiers of Egocentric AI with large-scale real-world data collection using purposely designed glasses with privacy first approach. To protect the privacy of bystanders being recorded by the glasses, our research protocols are designed to ensure recorded video is processed by an AI anonymization model that removes bystander faces and vehicle license plates. Detected face and license plate regions are processed with a Gaussian blur such that these personal identification information (PII) regions are obscured. This process helps to ensure that anonymized versions of the video is retained for research purposes. In Project Aria, we have developed a state-of-the-art anonymization system EgoBlur. In this paper, we present extensive analysis of EgoBlur on challenging datasets comparing its performance with other state-of-the-art systems from industry and academia including extensive Responsible AI analysis on recently released Casual Conversations V2 dataset.